

随着城生活节奏加快以及生活品质的不断提高,扫地机器人成为了年轻的都市白领的新宠。扫地机器人通常由主机、尘盒、遥控器、充电座等组成。扫地机器人不仅可以完成琐碎的扫地工作,还可以自动回充,通常使用20V适配器和4节锂电池串联供电。
锂电池充电管理可分为集成方案和分立方案,集成方案通常采用BQ24610或BQ24773(SMBUS/I2C接口),具有±0.5% 充电电压和±2% 充电电流精度,带有电源路径管理将系统电压稳定在电池电压,无电池或电池深度放电的情况下支持系统即时启动操作。
分立方案通常由MCU,MOS和运放构成(如图1所示),MCU实时采样电池的充电电压和充电电流,充电截止电流通常是充电电流的1/5~1/10。普通的运放由于本身的输入Offset偏置电压 (~3mV) 过大,使得充电电流采样的精度不高。例如,对于10mR的电流检测电阻在1A和0.2A充电时,运放引起的测量误差高达30%和150%,而采用TLV9062为前级运放,误差仅3%和15%
TLV9062是双通道低压5V放大器, 300uV的输入offset特别适用于高精度的电流检测前级放大,具有具有轨至轨输入和输出摆幅能力。此外,TLV9062还可以作为电压反馈前级buffer,0.5pA的输入漏电流可选用更大阻值的分压电阻,减少系统待机功耗。

图1 TLV9062用于扫地机锂电池充电管理
滚轮的好坏决定了扫地机器人的爬坡越障能力,滚轮动力越强劲,则扫地机器人的穿梭能力就越高效。考虑到实际应用中可能引起滚轮过载或堵转,MCU需要实时去采样滚轮电机电流并作相应的保护动作,TLV9062同样适用于直流电机电流前级放大,如图2,10M单位增益带宽让设计者获得更小的信号延时和失真。
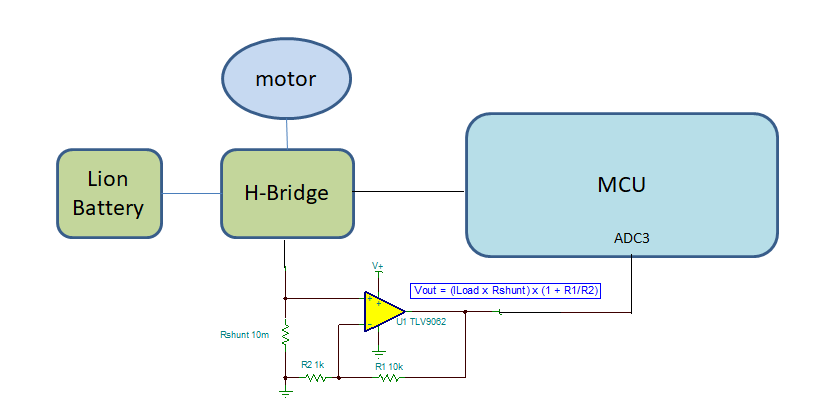
图2 TLV9062用于直流电机电流前级放大
目前大部分的扫地机的边刷电机驱动都是采用单MOS管PWM驱动方式,当边刷上缠绕过多毛发,就会不可避免的会出现边刷电机堵转的情况,严重时可能烧毁电机。图3电路采用TLV9062作为电机电流前级放大,送至ADC采样监控电流,后级采用TLV9062作为比较器,当电机堵转时快速关断MOS管,保护边刷系统。该电路为无滞回比较器,TLV9062也可以设计为带滞回比较器,详细请参考应用手册SOBA219。
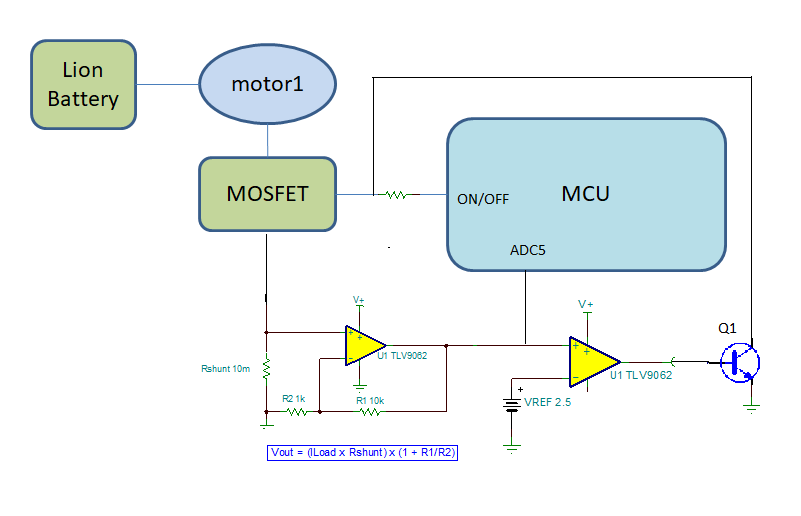
图3 TLV9062用于直流电机堵转保护
TLV9062 10MHz、低噪声、RRIO、 运放: http://www.ti.com.cn/product/cn/TLV9062
