


大家好,第一次使用BQ76930芯片有些问题请教下,我是参照官方提供的工程实例移植到PIC单片机上,可以正常读取I2C数据。
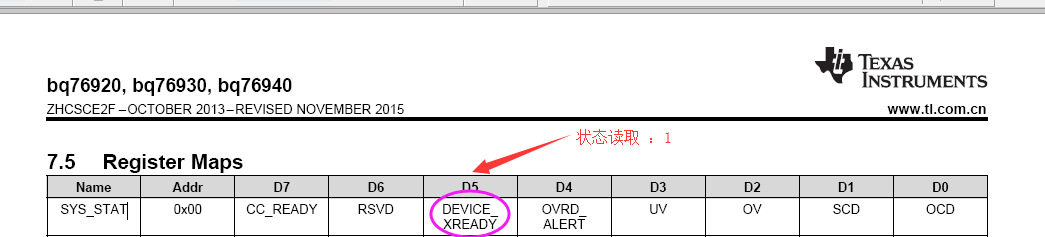
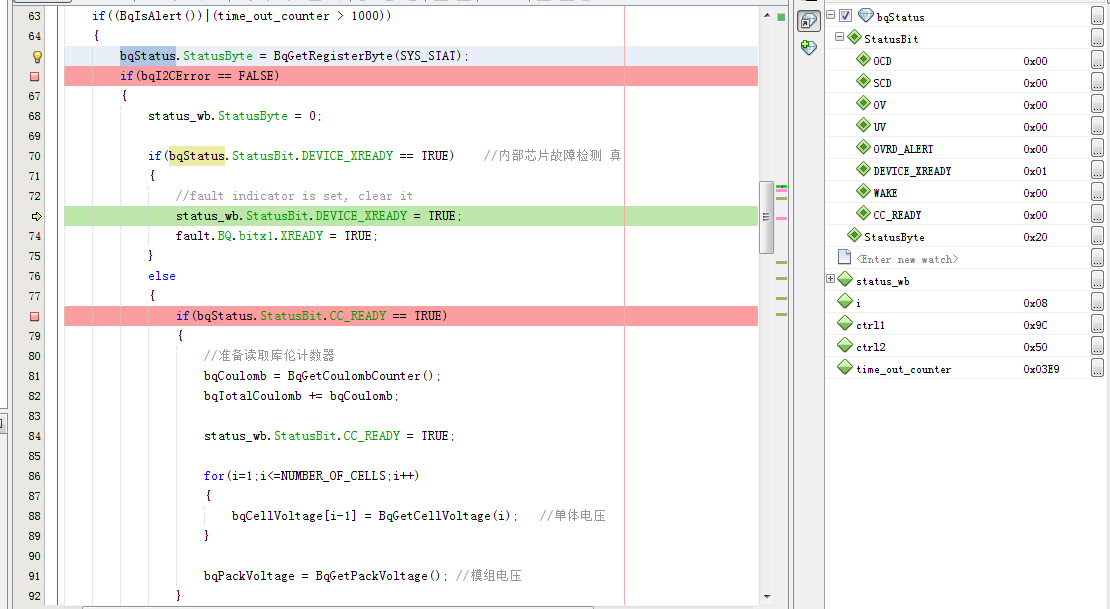
1、不能读取相应的电池电压、总压、温度数据问题为状态寄存器(DEVICE_XREADY)为高,读取SYS_STAT 值为0X20。
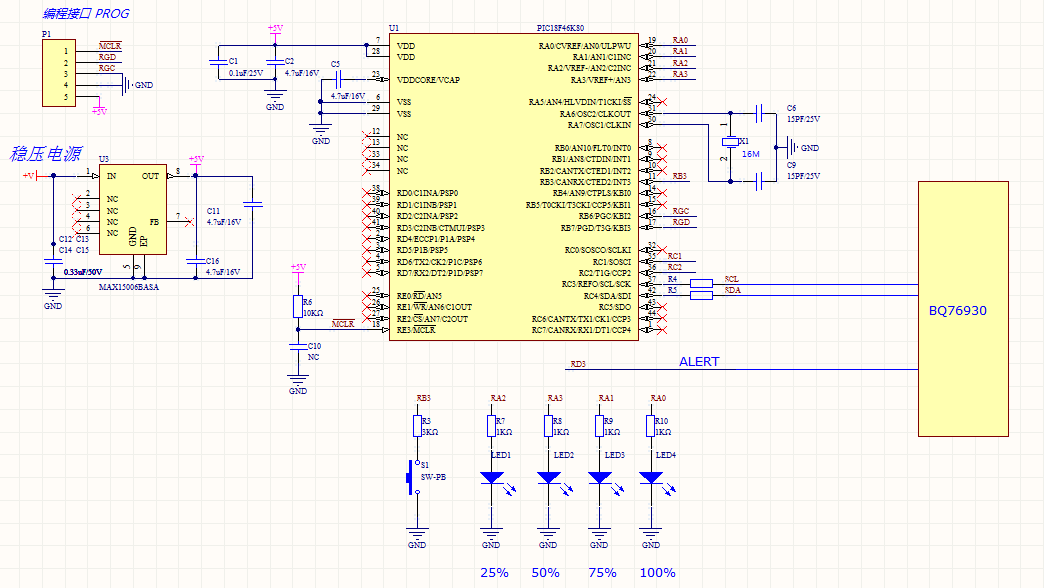
2、ALERT引脚如何使用,我现在单片机配置为输入模式是否正确?

下面是原理图
在线期待大家回复!
This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
大家好,第一次使用BQ76930芯片有些问题请教下,我是参照官方提供的工程实例移植到PIC单片机上,可以正常读取I2C数据。
1、不能读取相应的电池电压、总压、温度数据问题为状态寄存器(DEVICE_XREADY)为高,读取SYS_STAT 值为0X20。
2、ALERT引脚如何使用,我现在单片机配置为输入模式是否正确?
下面是原理图
在线期待大家回复!
上次的问题,是电池欠压保护导致的。
系统状态配置250MS读取一次库仑计数据 ,

现在问题
1、芯片本身的库仑计部分不能正常运行,一直进不了
2、电池采集位置不对,是不是需要重新配置相应的地址位?

屏蔽判断库仑计标志函数段后,能读取电池总压,电池单体4不正常?现在配置的是7串电池系统


BQ76930寄存器映射地址:

查看电池4读取数据就是47MV

我是按照手册提供方法配置的端口配置

请各位老师指点下!
问题2,采集单体电压值不对现象找到原因了
是单体电压计算时读取寄存器位置问题,利用查表方法对应单体电池寄存器位置,



库仑计默认情况下是没有打开,之前库仑计不能运行的问题是DSG_ON ,GHG_ON 两个标志位没有置1 导致的问题


现在库仑计可以工作了,为什么 芯片ALERT 引脚始终不能触发置1 ?
一直困惑中,期待回复!
请问我的i2c收到全是ff什么问题
#define CHG_H GPIOB->BSRR = GPIO_Pin_0 //high
#define CHG_L GPIOB->BRR = GPIO_Pin_0 //low
//#define DSG_H GPIOA->BSRR = GPIO_Pin_7
//#define DSG_L GPIOA->BRR = GPIO_Pin_7
//#define CHG_H CHG_ON = 1
//#define DSG_L DSG_ON = 1
////#define CHG_L CHG_ON = 0
//#define DSG_H DSG_ON = 0
extern unsigned char DSG_H;
extern unsigned char DSG_L;
//
//
///*control cell open or close*/
//extern void all_open(void);
//extern void sign_out(void);
//extern void sign_int(void);
//extern void all_close(void);
//
//void all_open(void)
//{
//
// CHG_H ;
// DSG_H ;
//}
//
//void sign_out(void)
//{
// CHG_H ;
// DSG_L ;
//}
//
//void sign_int(void)
//{
// CHG_L ;
// DSG_H ;
//}
//
//void all_close(void)
//{
// CHG_L ;
// DSG_L ;
//}
//
//typedef struct SSS1{
//CHG_H ;
//DSG_H ;
//}S1;
//
//typedef struct SSS2{
//CHG_H ;
//DSG_L ;
//}S2;
//
//typedef struct SSS3{
//CHG_L ;
//DSG_H ;
//}S3;
//
//typedef struct SSS4{
//CHG_L ;
//DSG_L ;
//}S4;
extern unsigned char CHG_ON;
extern unsigned char DSG_ON;
extern void intput(void) ;
extern void output(void) ;
void output(void)
{
// unsigned char CHG_ON = 0;
unsigned char DSG_ON = 0;
unsigned char a[2] = {3}; //DSGÀ¸ß
// unsigned char a[2] = {0};
CHG_L ;
I2C_FRAM_BufferWrite(&a[0],0x05,1);
DSG_ON = (a[0] >> 1) & 0X01 ;
printf("a[0]=%x",a[0]);
printf("OUTCHG_ON=%d",DSG_ON);
if(DSG_ON==1)
{
printf("output ok \n");
}
else
{
printf("OUT2222DSG_ON=%d",DSG_ON);
}
}
void intput(void)
{
unsigned char DSG_ON = 0;
unsigned char a[2] ={1};
// I2C_FRAM_BufferWrite(&a[0],0x05,1);
I2C_FRAM_BufferWrite(&a[0],0x05,1);
DSG_ON = (a[0]>> 1) & 0x01 ;
// CHG_H;
printf("INTCHG_ON=%d",DSG_ON);
if(DSG_ON==0)
{
printf("input ok \n");
}
else
{
printf("INTDSG_ON=%d",DSG_ON);
}
}
int main(void)
{
u8 yang;
u8 i = 0;
u8 j = 0;
u8 huan[1]={0};
u8 BQ769_INITAdd[11] ={0x00,0x01,0x02,0x04,0x05,0x06,0x07,0x08,0x09,0x0a,0x0b};
// [36] ={0x0c,0x0d,0x0e,0x0f,0x10,0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x1F,0x3c,0x3d};
u8 BQ769_INITdata[11]={0x08,0x00,0x00,0x18,0x43,0x00,0x00,0x00,0xAC,0x97,0x19};
uint16_t BQ769_RegAdd[12] ={0x0c,0x0d,0x0e,0x0f,0x51};
u8 a[30]={0x0c,0x0d,0x0e,0x0f,0x10,0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x1F,0x3c,0x3d};
uint8_t BQ769_Voltage[20] ={0};
// u8 readbuf1[20] = {0};
u8 readbuf2[20] = {0};
u8 aabuf[30] = {0};
Triode_On();
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
BEEP_Init(); //³õʼ»¯·äÃùÆ÷¶Ë¿Ú
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶
uart_init(9600); //´®¿Ú³õʼ»¯Îª9600
I2CInit();
Adc_Init();
// HalBq769x0Init();
// HalBq769x0IIC_Init();
BEEP1();
// HalBq769x0IIC_Init();
delay_ms(1000);
// intput();
output();
/******************************************/
I2C_FRAM_BufferWrite(BQ769_INITdata,BQ769_INITAdd[0],12);
for(i=0;i<12;i++)
{
// IIC_Write_nByte(BQ76930_ADDR, BQ769_INITAdd[i], 1,&BQ769_INITdata[i]);
// mxt_i2c_read_reg(BQ76930_ADDR, BQ769_INITAdd[i],1,&BQ769_INITdata[i]);
//HalBQ_WriteRegisterByte(BQ769_INITAdd[i],BQ769_INITdata[i]);
I2C_FRAM_BufferRead(BQ769_INITdata,BQ769_INITAdd[0],12);
//I2C_FRAM_BufferWrite(BQ769_INITdata,BQ769_INITAdd[0],12);
}
//
// I2C_FRAM_BufferWrite(BQ769_INITdata, BQ769_INITAdd[0],12);
// for(i = 0;i<10;i++){
// I2C_FRAM_BufferRead(BQ769_Voltage,BQ769_RegAdd[0],10);
// printf("BQ769_Voltage");
// for(j = 0;j<10;j++){
// printf(": %x ",BQ769_Voltage[j]);
// }
// }
printf("***********************************************µÚÒ»´Î");
delay_ms(1000);
for(i=0;i<11;i++)
{
// HalBQ_ReadBlock(BQ769_INITAdd[i],&aabuf[i],1);
// HalBQ_ReadRegisterByte(BQ769_INITAdd[i], BQ769_INITdata[i]);
}
// printf("BQ769--%x--",BQ769_INITdata);
// HalBQ_WriteBlock();
// HalBQ_ReadRegisterByte(a[i],aabuf[i]);
/*
// I2C_FRAM_BufferWrite(0x01,0x05,1); //
// I2C_FRAM_BufferWrite(0x02,0x05,1); //
// HalBq769x0I2CSendBytes(BQ769_INITAdd ,12);
// HalBq769x0I2CReadBytes();
// printf(" INITAdd[3]--%x--",BQ769_INITdata[3]);
// printf(" INITAdd[0]--%x--",BQ769_INITdata); */
/*****************************************************************************/
while(1)
{
Adc_Init();
Triode_On();
//intput();
output( ) ;
DSGInitH();
//DSGOUTH();
I2C_FRAM_BufferRead(BQ769_Voltage,BQ769_RegAdd[0],5);
BQ76930_red_vcc();
get_offset();
get_voldata();
IIC_Write_nByte(BQ76930_ADDR,0x04,1,BQ769_INITdata[3]);
mxt_i2c_read_reg(BQ76930_ADDR,0x04,1,&huan[0]);
printf("huan = %x",huan[0]);
red_vcc();
//printf("yang = %x",yang);
IIC_read_one_byte(0x10,0x32);
IIC_read_one_byte(0x10,0x33);
IIC_read_one_byte(0x10,0x0c);
IIC_read_one_byte(0x10,0x0d);
IIC_read_one_byte(0x10,0x0c);
IIC_read_one_byte(0x10,0x0d);
IIC_read_one_byte(0x10,0x0e);
IIC_read_one_byte(0x10,0x0f);
IIC_read_one_byte(0x10,0x10);
IIC_read_one_byte(0x10,0x11);
// for(i=0;i<16;i++)
{
// HalBQ_ReadRegisterByte(&0x01,aabuf[i]);
// printf("-%d ",aabuf[i]);
}
delay_ms(3000);
printf("\n ***************** \n ");
}
#include "I2C.h"
#include "stm32f10x.h"
#include "stm32f10x_it.h"
#include "delay.h"
u8 FRAM_ADDRESS;
/* function ------------------------------------------------------------------*/
//void I2CInit(void)
//{
// GPIO_InitTypeDef GPIO_InitStructure;
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
////SDA
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
// GPIO_Init(GPIOB, &GPIO_InitStructure);
////SCL
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
// GPIO_Init(GPIOB, &GPIO_InitStructure);
// SCL_H;
// SDA_H;
//}
//³õʼ»¯pb.10ºÍpb.11ΪÊä³ö¶Ë¿Ú£¬²¢Ê¹ÄÜÕâÁ½¸öʱÖÓ
//I2C³õʼ»¯
void Triode_On(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
Triode_H;
}
void DSGInitH(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
DSG_H1;
}
void DSGInitL(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
DSG_L1;
}
void DSGOUTH(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
DSG_H2;
}
void DSGOUTL(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
DSG_L2;
}
void I2CInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//I2C_InitTypeDef I2C_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // ʹÄÜGPIOB¶Ë¿ÚʱÖÓ
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //ËÙ¶ÈΪ50MHZ
//SDA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 ; //I2C-->pb.11¶Ë¿ÚÅäÖÃ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure); //³õʼ»¯GPIOB.11
//SCL
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //I2C-->pb.10¶Ë¿ÚÅäÖÃ
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure); //³õʼ»¯GPIOB.10
// I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //ÉèÖÃi2cΪi2cģʽ
// I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //Öƶ¨Ê±ÖÓ¿ÕÕ¼±È
// I2C_InitStructure.I2C_OwnAddress1 = I2C_Mode_SMBusHost; //Öƶ¨×ÔÉíµÄI2CÉ豸µØÖ·
// I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //ʹÄÜ
// I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; // ÆßλµØÖ·³¤¶È
// I2C_InitStructure.I2C_ClockSpeed = I2C_Speed; //ÉèÖÃʱÖÓƵÂÊ
// I2C_Cmd(I2C1,ENABLE);
// I2C_Init(I2C1,&I2C_InitStructure);
SCL_H;
SDA_H;
}
/*******************************************************************************/
void I2C_delay(void)
{
//u8 i=200;
//while(i)
//{
// i--;
//}
delay_us(10);
}
/*******************************************************************************/
u8 I2C_Start(void)
{
SDA_H;
SCL_H;
I2C_delay();
if(!SDA_read)return FALSE; //SDAÏßΪµÍµçƽ×ÜÏßæÍ˳ö
SDA_L;
I2C_delay();
if(SDA_read) return FALSE; //SDAÏßΪ¸ßµçƽ×ÜÏß³ö´íÍ˳ö
SCL_L;
I2C_delay();
return TRUE;
}
/*******************************************************************************/
void I2C_Stop(void)
{
SCL_L;
I2C_delay();
SDA_L;
I2C_delay();
SCL_H;
I2C_delay();
SDA_H;
I2C_delay();
}
/*******************************************************************************/
/*******************************************************************************/
void I2C_NoAck(void)
{
SCL_L;
I2C_delay();
SDA_H;
I2C_delay();
SCL_H;
I2C_delay();
SCL_L;
I2C_delay();
}
void I2C_Ack(void)
{
SCL_L;
I2C_delay();
SDA_L;
I2C_delay();
SCL_H;
I2C_delay();
SCL_L;
I2C_delay();
}
/*******************************************************************************/
u8 I2C_WaitAck(void)
{
SCL_L;
I2C_delay();
SDA_H;
I2C_delay();
SCL_H;
I2C_delay();
if(SDA_read)
{
SCL_L;
return FALSE;
}
SCL_L;
return TRUE;
}
/*******************************************************************************/
void I2C_SendByte(u8 SendByte) //Êý¾Ý·¢ËÍ´Ó¸ßλµ½µÍλ
{
u8 i=8;
while(i--)
{
SCL_L;
I2C_delay();
if(SendByte&0x80)
SDA_H;
else
SDA_L;
SendByte<<=1;
I2C_delay();
SCL_H;
I2C_delay();
}
SCL_L;
}
/*******************************************************************************/
u8 I2C_ReceiveByte(void) //Êý¾Ý´Ó¸ßλµ½µÍλ
{
u8 i=8;
u8 ReceiveByte=0;
SDA_H;
while(i--)
{
ReceiveByte<<=1;
SCL_L;
I2C_delay();
SCL_H;
I2C_delay();
if(SDA_read)
{
ReceiveByte|=0x01;
}
}
SCL_L;
return ReceiveByte;
}
void IIC_single_byte_write(unsigned char Daddr,unsigned char Waddr,unsigned char Data)
{
I2C_Start();
I2C_SendByte(Daddr<<1);
if (!I2C_WaitAck())
{
I2C_Stop(); //
//return FALSE;
}
//I2C_Ack();
I2C_SendByte(Waddr);
I2C_WaitAck();
I2C_SendByte(Data) ;
I2C_WaitAck();
//printf("write ok!");
I2C_Stop();
}
unsigned char IIC_read_one_byte(unsigned char Daddr,unsigned char Waddr) //É豸µØÖ· Òª²Ù×÷µÄµØÖ·
{
unsigned char Data;
I2C_Start();
I2C_SendByte(Daddr<<1);
// printf("Daddr=%x \n",Daddr);
if (!I2C_WaitAck())
{
I2C_Stop(); //
return FALSE;
}
// I2C_Ack();
I2C_SendByte(Waddr);
I2C_WaitAck();
//printf("Waddr=%x \n",Waddr);
I2C_Start();
I2C_SendByte(Daddr<<1|0x1);
// I2C_SendByte(Daddr );
I2C_WaitAck();
Data = I2C_ReceiveByte();
//printf("Data=%s \n",Data);
I2C_NoAck();
I2C_Stop();
return Data;
}
/*******************************************************************************/
u8 I2C_FRAM_BufferWrite(u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite)
{
u8 Addr = 0, count = 0;
Addr = (WriteAddr) / I2C_PageSize;
// printf("Addr=%x \n",Addr) ;
count = (WriteAddr) % I2C_PageSize;
// printf("count=%x \n", count) ;
Addr = Addr << 1;
Addr = Addr & 0x0F;
FRAM_ADDRESS = I2C1_SLAVE_ADDRESS7_W | Addr;
if (!I2C_Start())
return FALSE;
I2C_SendByte(FRAM_ADDRESS);
printf("FRAM_ADDRESS=%x \n",FRAM_ADDRESS) ;
if (!I2C_WaitAck())
{
I2C_Stop(); //
return FALSE;
}
I2C_SendByte(count);
I2C_WaitAck();
while(NumByteToWrite--)
{
I2C_SendByte(* pBuffer);
// printf("%x \n", * pBuffer) ;
printf("pBuffer1=%x \n",pBuffer) ;
I2C_WaitAck();
pBuffer++;
}
I2C_Stop();
return TRUE;
//return * pBuffer;
}
/*******************************************************************************/
u8 I2C_FRAM_BufferRead(u8* pBuffer, u16 WriteAddr, u16 NumByteToRead)
{
u8 Addr = 0, count = 0;
Addr = WriteAddr / I2C_PageSize ;
count = WriteAddr % I2C_PageSize ;
Addr = Addr << 1 ;
Addr = Addr & 0x0F ;
// printf("addr = %d \n",Addr);
FRAM_ADDRESS = I2C1_SLAVE_ADDRESS7_R | Addr ;
if (!I2C_Start()) return FALSE;
I2C_SendByte(FRAM_ADDRESS);
//printf("111111");
if (!I2C_WaitAck())
{
I2C_Stop();
return FALSE;
}
I2C_SendByte(count);
printf("count=%d",count);
I2C_WaitAck();
I2C_Start();
I2C_SendByte(FRAM_ADDRESS | 0x01);
I2C_WaitAck();
while(NumByteToRead)
{
*pBuffer = I2C_ReceiveByte();
printf(" * pBuffer2=%x \n", * pBuffer) ;
printf("pBuffer2=%p \n",pBuffer) ;
printf("FRAM_ADDRESS=%x \n",FRAM_ADDRESS) ;
if(NumByteToRead == 1)I2C_NoAck();
else I2C_Ack();
pBuffer++;
NumByteToRead--;
}
I2C_Stop();
return TRUE;
}
u8 IIC_Write_nByte(u8 SlaveAddress, u8 REG_Address, u8 len, u8 *buf)
{
I2C_Start();
I2C_SendByte(SlaveAddress<<1);
if( !I2C_WaitAck())
{
I2C_Stop();
return 1;
}
I2C_SendByte(REG_Address);
I2C_WaitAck();
while(len--)
{
I2C_SendByte(*buf++);
I2C_WaitAck();
}
I2C_Stop();
return 0;
}
///////////////////////////////////////////////////////////////
unsigned char mxt_i2c_read_reg(u8 ADDR,u8 reg, u8 length, u8* buf)
{
//printf("µÚ1");
I2C_Start();
I2C_SendByte(ADDR<<1);
I2C_WaitAck();
I2C_SendByte(reg);
I2C_WaitAck();
I2C_Stop();
I2C_Start();
I2C_SendByte((ADDR<<1) | 0x01);
I2C_WaitAck();
while(length)
{
if(length == 1)
{
*buf = I2C_ReceiveByte();
//printf("µÚ2");
// I2C_ReceiveByte();
// *buf =Get_Adc(3);
I2C_NoAck();
}
else
{
*buf++ = I2C_ReceiveByte();
// I2C_ReceiveByte();
// *buf++ = Get_Adc(3);
I2C_Ack();
}
length--;
}
I2C_Stop();
return 1;
}
//
//////////////////////////////////////////////////////////////////////////////////
void BQ76930_red_vcc(void)
{
u8 pBuffer[40];
u8 buf[30] ={0};
u8 a[30]={0};
int i;
I2C_FRAM_BufferRead(&pBuffer[0],pBuffer[0],1);
I2C_FRAM_BufferRead(&pBuffer[1],pBuffer[1],1);
I2C_FRAM_BufferRead(&pBuffer[2],pBuffer[2],1);
I2C_FRAM_BufferRead(&pBuffer[3],pBuffer[3],1);
I2C_FRAM_BufferRead(&pBuffer[4],pBuffer[4],1);
I2C_FRAM_BufferRead(&pBuffer[5],pBuffer[5],1);
I2C_FRAM_BufferRead(&pBuffer[6],pBuffer[6],1);
I2C_FRAM_BufferRead(&pBuffer[7],pBuffer[7],1);
I2C_FRAM_BufferRead(&pBuffer[8],pBuffer[8],1);
I2C_FRAM_BufferRead(&pBuffer[9],pBuffer[9],1);
for(i=0;i<30;i++)
{
I2C_FRAM_BufferRead(&a[i],a[i],1);
I2C_FRAM_BufferRead(&pBuffer[i],pBuffer[i],1);
printf(" %x \n",&pBuffer[i]);
printf("-%d-\n",pBuffer[i]);
}
}
void get_offset(void)
{
unsigned char gain[3];
unsigned char Gain;
unsigned char ADCoffset ;
int ADGain ;
// static unsigned char ADC_offset = 0;
// static unsigned char AD_Gain = 0;
I2C_FRAM_BufferRead(&gain[0],0x50,1);
I2C_FRAM_BufferRead(&gain[1],0x59,1);
printf("gain[0]=%x",gain[0]);
printf("gain[1]=%x",gain[1]);
Gain = ((gain[0]&0x0c)<<1)+((gain[1]&0xe0)>>5);
// printf(" Gain=%x", Gain);
I2C_FRAM_BufferRead(&gain[2],0x51,1);
ADCoffset= gain[2] ;
ADGain = 365+Gain;
printf("ADCoffset=%x",ADCoffset); // =1
printf("ADGain=%x",ADGain); // =374
}
unsigned char CRC8(unsigned char *ptr, unsigned char len,unsigned char key) //Êý¾Ý Êý¾Ý³¤¶È УÑéÊý
{
unsigned char i;
unsigned char crc=0;
while(len--!=0)
{
for(i=0x80; i!=0; i/=2)
{
if((crc & 0x80) != 0)
{
crc *= 2;
crc ^= key;
}
else
crc *= 2;
if((*ptr & i)!=0)
crc ^= key;
}
ptr++;
}
return(crc);
}
int I2CReadRegisterByteWithCRC(unsigned char I2CSlaveAddress, unsigned char Register, unsigned char *Data)
{
// unsigned char TargetRegister = Register;
// unsigned int SentByte = 0;
// unsigned char ReadData[2];
// unsigned int ReadDataCount = 0;
// unsigned char CRCInput[2];
// unsigned char CRC = 0;
// int ReadStatus = 0;
// int WriteStatus = 0;
//
// WriteStatus = I2CSendBytes(I2CSlaveAddress, &TargetRegister, 1, &SentByte);
//
// ReadStatus = I2CReadBytes(I2CSlaveAddress, ReadData, 2, &ReadDataCount);
//
// if (ReadStatus != 0 || WriteStatus != 0)
// {
// return -1;
// }
//
// CRCInput[0] = (I2CSlaveAddress << 1) + 1;
// CRCInput[1] = ReadData[0];
//
// CRC = CRC8(CRCInput, 2, CRC_KEY);
//
// if (CRC != ReadData[1])
// return -1;
//
// *Data = ReadData[0];
return 0;
}
/*unsigned char i2c_read_reg(u8 ADDR,u8 reg, u8 length, u8* buf)
{
I2C_Start();
I2C_SendByte((ADDR<<1) | 0X00);
I2C_SendByte(reg);
I2C_Stop();
I2C_Start();
I2C_SendByte((ADDR<<1) | 0X01);
while(length)
{
if(length == 1)
{
*buf = I2C_ReceiveByte(NOACK);
}
else
{
*buf++ = I2C_ReceiveByte(ACK);
}
length--;
}
I2C_Stop();
return 1;
}
*/
void red_vcc(void)
{
//DSGInit();
u8 buf[100]={0};
u8 i=0;
mxt_i2c_read_reg(BQ76930_ADDR,0x0C,30,&buf[0]);
mxt_i2c_read_reg(BQ76930_ADDR,0x0C,1,&buf[0]);
mxt_i2c_read_reg(BQ76930_ADDR,0x0D,1,&buf[1]);
mxt_i2c_read_reg(BQ76930_ADDR,0x0E,1,&buf[2]);
mxt_i2c_read_reg(BQ76930_ADDR,0x0F,1,&buf[3]);
mxt_i2c_read_reg(BQ76930_ADDR,0x10,1,&buf[4]);
mxt_i2c_read_reg(BQ76930_ADDR,0x11,1,&buf[5]);
mxt_i2c_read_reg(BQ76930_ADDR,0x12,1,&buf[6]);
mxt_i2c_read_reg(BQ76930_ADDR,0x13,1,&buf[7]);
mxt_i2c_read_reg(BQ76930_ADDR,0x14,1,&buf[8]);
mxt_i2c_read_reg(BQ76930_ADDR,0x15,1,&buf[9]);
mxt_i2c_read_reg(BQ76930_ADDR,0x16,1,&buf[10]);
mxt_i2c_read_reg(BQ76930_ADDR,0x17,1,&buf[11]);
mxt_i2c_read_reg(BQ76930_ADDR,0x18,1,&buf[12]);
mxt_i2c_read_reg(BQ76930_ADDR,0x19,1,&buf[13]);
mxt_i2c_read_reg(BQ76930_ADDR,0x1A,1,&buf[14]);
mxt_i2c_read_reg(BQ76930_ADDR,0x1B,1,&buf[15]);
mxt_i2c_read_reg(BQ76930_ADDR,0x1C,1,&buf[16]);
mxt_i2c_read_reg(BQ76930_ADDR,0x1D,1,&buf[17]);
mxt_i2c_read_reg(BQ76930_ADDR,0x1E,1,&buf[18]);
mxt_i2c_read_reg(BQ76930_ADDR,0x1F,1,&buf[19]);
//mxt_i2c_read_reg(BQ76930_ADDR,0x0C | 0x0D,1,&buf[20]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x21,1,&buf[21]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x22,1,&buf[22]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x23,1,&buf[23]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x24,1,&buf[24]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x25,1,&buf[25]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x26,1,&buf[26]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x27,1,&buf[27]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x28,1,&buf[28]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x29,1,&buf[29]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x2a,1,&buf[30]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x2b,1,&buf[31]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x2c,1,&buf[31]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x2d,1,&buf[32]);
//
// mxt_i2c_read_reg(BQ76930_ADDR,0x2e,1,&buf[33]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x2f,1,&buf[34]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x30,1,&buf[35]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x31,1,&buf[36]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x32,1,&buf[37]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x33,1,&buf[38]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x50,1,&buf[39]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x51,1,&buf[40]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x59,1,&buf[41]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x60,1,&buf[42]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x61,1,&buf[43]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x68,1,&buf[44]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x70,1,&buf[45]);
// mxt_i2c_read_reg(BQ76930_ADDR,0x76,1,&buf[46]);
printf("buf :");
for(i=0;i<21;i++)
{
printf("=%x=",buf[i]);
}
for(i=0;i<21;i++)
{
printf("^%d^",buf[i]);
}
}
#include "BQIIC.h"
#include "sys.h"
#include "delay.h"
#include "usart.h"
static void HalBq769x0IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = BQ769x0_IIC_SCL_PIN ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //????
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = BQ769x0_IIC_SDA_PIN; ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD ; //????
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(BQ769x0_IIC_PORT, &GPIO_InitStructure);
GPIO_Init(GPIOB, &GPIO_InitStructure);
BQ769x0_IIC_SCL_H;
BQ769x0_IIC_SDA_H;
}
//??IIC????
static void HalBq769x0IIC_Start(void)
{
BQ769x0_IIC_SDA_OUT; //sda???
BQ769x0_IIC_SCL_H;
BQ769x0_IIC_SDA_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SDA_L; //START:when CLK is high,DATA change form high to low
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L; //??I2C??,?????????
}
//??IIC????
static void HalBq769x0IIC_Stop(void)
{
BQ769x0_IIC_SDA_OUT ;//sda
BQ769x0_IIC_SCL_L;
BQ769x0_IIC_SDA_L; //STOP:when CLK is high DATA change form low to high
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SDA_H; //
delay_us(BQ769x0_IIC_DELAY_US);
}
//
//
//
static uint8_t HalBq769x0IIC_Wait_Ack(void)
{
uint32_t ucErrTime = 0;
BQ769x0_IIC_SDA_IN ; //SDA?????
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
while(BQ769x0_IIC_READ_SDA())
{
ucErrTime++;
if(ucErrTime > BQ769x0_IIC_ACK_TIME_OUT)
{
printf("BQ769x0_IIC_ACK_TIME_OUT");
HalBq769x0IIC_Stop();
return 1;
}
}
BQ769x0_IIC_SCL_L; //????L
return 0;
}
//??ACK??
static void HalBq769x0IIC_Ack(void)
{
BQ769x0_IIC_SCL_L;
BQ769x0_IIC_SDA_OUT;
BQ769x0_IIC_SDA_L;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
// HalNormalDelayUs(BQ769x0_IIC_DELAY_US);
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L;
}
//???ACK??
static void HalBq769x0IIC_NAck(void)
{
BQ769x0_IIC_SCL_L;
BQ769x0_IIC_SDA_OUT ;
BQ769x0_IIC_SDA_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L;
}
static void HalBq769x0IIC_Send_Byte(uint8_t txd)
{
uint8_t t;
BQ769x0_IIC_SDA_OUT;
BQ769x0_IIC_SCL_L;
for(t = 0; t < 8; t++)
{
if(txd & 0x80)
{
BQ769x0_IIC_SDA_H;
}
else
{
BQ769x0_IIC_SDA_L;
}
txd <<= 1;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L;
}
BQ769x0_IIC_SDA_IN;
}
static uint8_t HalBq769x0IIC_Read_Byte(uint8_t ack)
{
uint8_t i, receive = 0;
BQ769x0_IIC_SDA_IN;//SDA?????
for(i = 0; i < 8; i++ )
{
BQ769x0_IIC_SCL_L;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
receive <<= 1;
if(BQ769x0_IIC_READ_SDA())
{
receive++;
}
delay_us(BQ769x0_IIC_DELAY_US);
}
if (!ack)
{
HalBq769x0IIC_NAck(); //??nACK
}
else
{
HalBq769x0IIC_Ack(); //??ACK
}
return receive;
}
//???IIC??
void HalBq769x0IIC_SoftReset(void)
{
uint32_t i;
//start
BQ769x0_IIC_SCL_H;
BQ769x0_IIC_SDA_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SDA_L; //START:when CLK is high,DATA change form high to low
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L; //??I2C??,?????????
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SDA_H;
delay_us(BQ769x0_IIC_DELAY_US);
for(i = 0; i < 9; i++)
{
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L;
delay_us(BQ769x0_IIC_DELAY_US);
}
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SDA_L;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_L;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SCL_H;
delay_us(BQ769x0_IIC_DELAY_US);
BQ769x0_IIC_SDA_H;
delay_us(BQ769x0_IIC_DELAY_US);
}
/* */
static int8_t HalBq769x0I2CSendBytes(uint8_t *DataBuffer, uint16_t ByteCount)
{
uint16_t i;
uint8_t slave_addr = BQ769X0_SLAVE_ADDR << 1; //0x08
HalBq769x0IIC_Start();
HalBq769x0IIC_Send_Byte(slave_addr | BQ_CMD_WRITE); //0x00
HalBq769x0IIC_Wait_Ack();
for(i = 0; i < ByteCount; i++)
{
HalBq769x0IIC_Send_Byte(DataBuffer[i]);
HalBq769x0IIC_Wait_Ack();
}
HalBq769x0IIC_Stop();
return 0x00;
}
static int8_t HalBq769x0I2CReadBytes(uint8_t *DataBuffer, uint16_t ExpectedByteNumber)
{
uint16_t i;
uint8_t slave_addr = BQ769X0_SLAVE_ADDR << 1;
HalBq769x0IIC_Start();
HalBq769x0IIC_Send_Byte(slave_addr | BQ_CMD_READ);
HalBq769x0IIC_Wait_Ack();
for(i = 0; i < ExpectedByteNumber; i++)
{
if(i == ExpectedByteNumber - 1)
{
DataBuffer[i] = HalBq769x0IIC_Read_Byte(0);
}
else
{
DataBuffer[i] = HalBq769x0IIC_Read_Byte(1);
}
}
HalBq769x0IIC_Stop();
return 0;
}
void HalBq769x0Init(void)
{
HalBq769x0IIC_Init();
}
#ifdef BQWITHCRC
static uint8_t CRC8(uint8_t *ptr, uint8_t len, uint8_t key)
{
uint8_t i;
uint8_t crc = 0;
while(len-- != 0)
{
for(i = 0x80; i != 0; i /= 2)
{
if((crc & 0x80) != 0)
{
crc *= 2;
crc ^= key;
}
else
{
crc *= 2;
}
if((*ptr & i) != 0)
{
crc ^= key;
}
}
ptr++;
}
return(crc);
}
int8_t HalBQ_ReadRegisterByte(uint8_t Register, uint8_t *Data)
{
uint8_t TargetRegister = Register;
uint8_t ReadData[2];
uint8_t CRCInput[2];
uint8_t crc_val = 0;
HalBq769x0I2CSendBytes(&TargetRegister, 1);
HalBq769x0I2CReadBytes(ReadData, 2);
CRCInput[0] = (BQ769X0_SLAVE_ADDR << 1) + 1;
CRCInput[1] = ReadData[0];
crc_val = CRC8(CRCInput, 2, CRC_KEY);
if (crc_val != ReadData[1])
{
SysLog("crc err!! %02x,%02x,crc_cal=%02x", ReadData[0], ReadData[1], crc_val);
return -1;
}
*Data = ReadData[0];
return 0;
}
int8_t HalBQ_ReadRegisterWord(uint8_t Register, uint16_t *Data)
{
uint8_t TargetRegister = Register;
uint8_t ReadData[4];
uint8_t CRCInput[2];
uint8_t crc_val = 0;
HalBq769x0I2CSendBytes(&TargetRegister, 1);
HalBq769x0I2CReadBytes(ReadData, 4);
CRCInput[0] = (BQ769X0_SLAVE_ADDR << 1) + 1;
CRCInput[1] = ReadData[0];
crc_val = CRC8(CRCInput, 2, CRC_KEY);
if (crc_val != ReadData[1])
{
return -1;
}
crc_val = CRC8(ReadData + 2, 1, CRC_KEY);
if (crc_val != ReadData[3])
{
return -1;
}
*Data = (ReadData[0] << 8) + ReadData[2];
return 0;
}
int8_t HalBQ_ReadBlock(uint8_t Register, uint8_t *Buffer, uint8_t Length) //¼Ä´æÆ÷µØÖ· Êý¾Ý Êý¾Ý³¤¶È
{
uint8_t TargetRegister = Register;
uint8_t ReadData[BQ769X0_REGISTER_NUM * 2];
uint8_t CRCInput[2];
uint8_t crc_val = 0;
int8_t i;
HalBq769x0I2CSendBytes(&TargetRegister, 1);
HalBq769x0I2CReadBytes(ReadData, 2 * Length);
CRCInput[0] = (BQ769X0_SLAVE_ADDR << 1) + 1;
CRCInput[1] = ReadData[0];
crc_val = CRC8(CRCInput, 2, CRC_KEY);
if (crc_val != ReadData[1])
{
return -1;
}
else
{
Buffer[0] = ReadData[0];
}
for(i = 2; i < Length * 2; i += 2)
{
crc_val = CRC8(ReadData + i, 1, CRC_KEY);
if (crc_val != ReadData[i + 1])
{
return -1;
}
else
{
Buffer[i >> 1] = ReadData[i];
}
}
return 0;
}
int8_t HalBQ_WriteRegisterByte(uint8_t Register, uint8_t Data)
{
uint8_t DataBuffer[4];
DataBuffer[0] = BQ769X0_SLAVE_ADDR << 1;
DataBuffer[1] = Register;
DataBuffer[2] = Data;
DataBuffer[3] = CRC8(DataBuffer, 3, CRC_KEY);
return(HalBq769x0I2CSendBytes(DataBuffer + 1, 3));
}
int8_t HalBQ_WriteRegisterWord(uint8_t Register, uint16_t Data)
{
uint8_t DataBuffer[6];
DataBuffer[0] = BQ769X0_SLAVE_ADDR << 1;
DataBuffer[1] = Register;
DataBuffer[2] = (uint8_t)(Data & 0xff);
DataBuffer[3] = CRC8(DataBuffer, 3, CRC_KEY);
DataBuffer[4] = (uint8_t)((Data >> 8) & 0xff);
DataBuffer[5] = CRC8(DataBuffer + 4, 1, CRC_KEY);
return(HalBq769x0I2CSendBytes(DataBuffer + 1, 5));
}
int8_t HalBQ_WriteBlock(uint8_t StartAddress, uint8_t *Buffer, uint8_t Length)
{
uint8_t send_buffer[BQ769X0_REGISTER_NUM * 2 + 2]; // 0x40
int8_t result;
uint8_t i, *pt;
send_buffer[0] = BQ769X0_SLAVE_ADDR << 1;
send_buffer[1] = StartAddress;
send_buffer[2] = Buffer[0];
send_buffer[3] = CRC8(send_buffer, 3, CRC_KEY);
pt = send_buffer + 4;
for(i = 1; i < Length; i++)
{
*pt++ = Buffer[i];
*pt++ = CRC8(Buffer + i, 1, CRC_KEY);
}
result = HalBq769x0I2CSendBytes(send_buffer + 1, 2 * Length + 1);
return result;
}
/////////////////////////////////////////////////////////////////////////////
#else
int8_t HalBQ_WriteBlock(uint8_t StartAddress, uint8_t *Buffer, uint8_t Length)
{
uint8_t send_buffer[BQ769X0_REGISTER_NUM + 1];
int8_t i, result;
uint8_t *pt = send_buffer;
if(Length > BQ769X0_REGISTER_NUM)
{
return -1;
}
*pt++ = StartAddress;
for(i = 0; i < Length; i++)
{
*pt++ = Buffer[i];
}
result = HalBq769x0I2CSendBytes(send_buffer, Length + 1);
return result;
}
int8_t HalBQ_WriteRegisterByte(uint8_t Register, uint8_t Data)
{
uint8_t DataBuffer[2];
int8_t tempVal;
DataBuffer[0] = Register;
DataBuffer[1] = Data;
tempVal = HalBq769x0I2CSendBytes(DataBuffer, 2);
return tempVal;
}
int8_t HalBQ_WriteRegisterWord(uint8_t Register, uint16_t Data)
{
uint8_t DataBuffer[3];
int8_t tempVal;
DataBuffer[0] = Register;
DataBuffer[1] = (uint8_t)(Data & 0xff);
DataBuffer[2] = (uint8_t)((Data >> 8) & 0xff);
tempVal = HalBq769x0I2CSendBytes(DataBuffer, 3);
return tempVal;
}
int8_t HalBQ_ReadRegisterByte(uint8_t Register, uint8_t *DataBuf)
{
uint8_t TargetRegister = Register;
HalBq769x0I2CSendBytes(&TargetRegister, 1);
HalBq769x0I2CReadBytes(DataBuf, 1);
return 0;
}
int8_t HalBQ_ReadRegisterWord(uint8_t Register, uint16_t *DataBuf)
{
uint8_t ReadData[4];
uint8_t TargetRegister = Register;
HalBq769x0I2CSendBytes(&TargetRegister, 1);
HalBq769x0I2CReadBytes(ReadData, 2);
*DataBuf = ((uint16_t)ReadData[0] << 8) + (uint16_t)ReadData[2];
return 0;
}
int8_t HalBQ_ReadBlock1(uint8_t StartRegisterAddress, uint8_t *Buffer, uint16_t BlockSize)
{
uint8_t TargetRegister = StartRegisterAddress;
uint16_t SentByte = 0;
HalBq769x0I2CSendBytes(&TargetRegister, 1);
HalBq769x0I2CReadBytes(Buffer, BlockSize);
return 0;
}
#endif

