



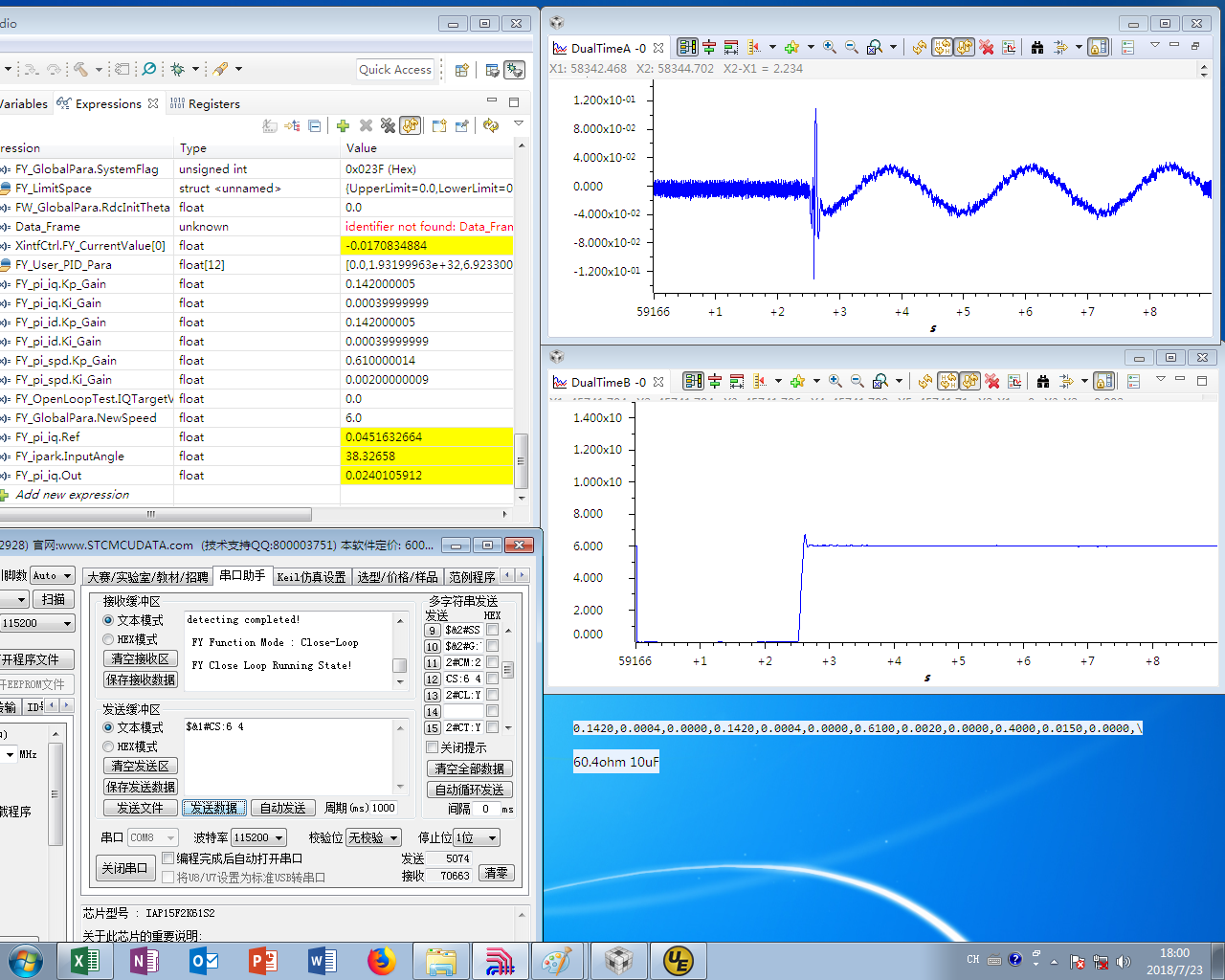
如上图所示,是我目前调试的永磁同步电机的转速采集及描绘曲线路径系统简图
电机:永磁同步电机
额定转速::RPM,即18度/秒
速度检测:24位绝对式光栅。转速计算间隔1mS,因此转速分辨率0.021度/秒。转速计算没有像SPEED_FR中那样利用电角度计算,考虑速度是位置的微分,因此用转子机械位置计算转速。
控制方式:FOC
我要控制转速的误差在0.05度/秒以内
为了达到这个目的,我将微分后的软件一阶低通滤波器截止频率设置的很低,0.4Hz,将速度环PI控制器比例系数调的比较大。速度反馈通道加入一阶低通滤波器,使引入了一个极点,导致系统滞后,超调量变大甚至震荡。通过加大速度环PI控制器比例系数,加快系统响应,减小超调或避免震荡。目前得到了如下控制结果:
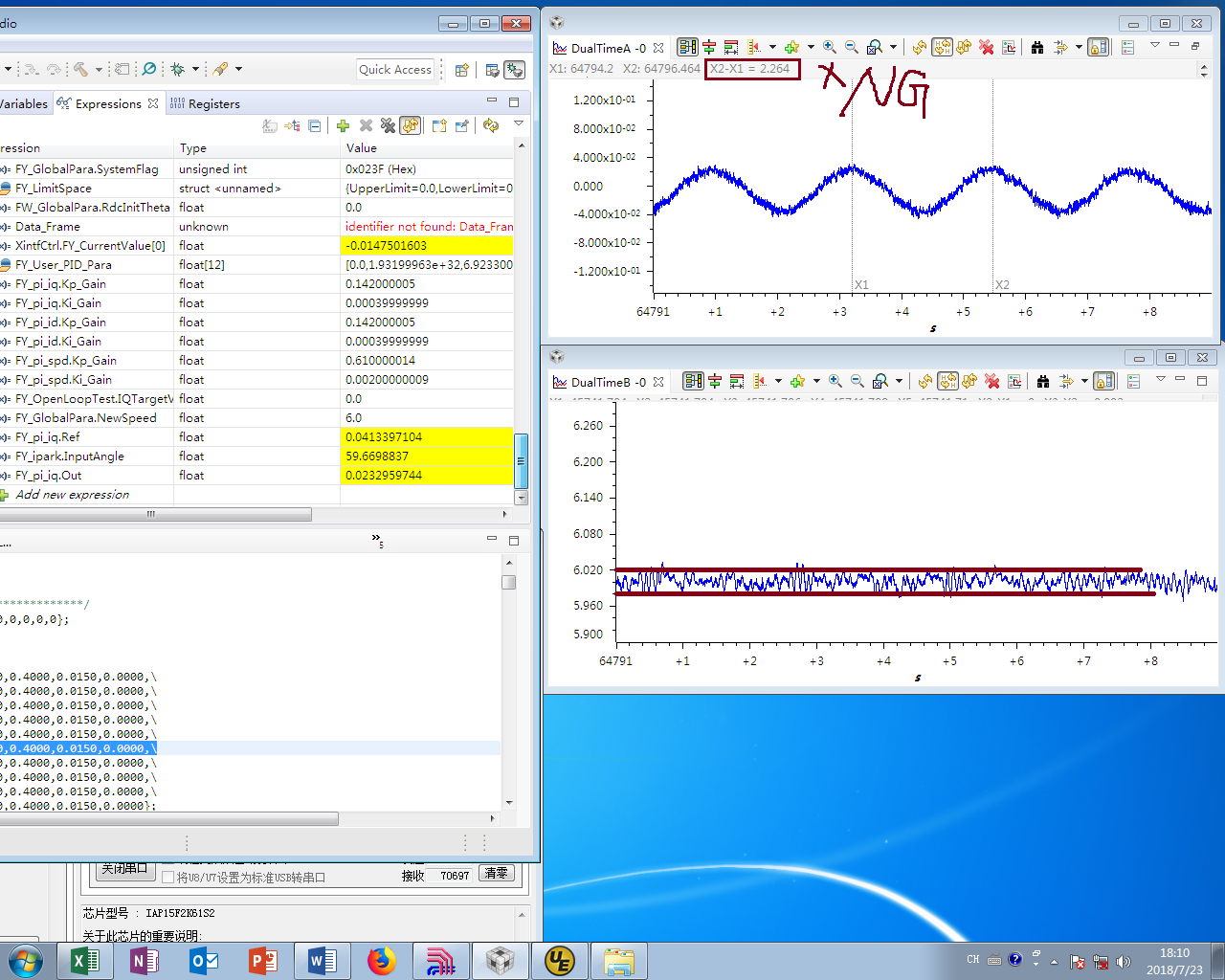
问题1.一阶低通滤波后的速度信号既是速度环PI控制器的反馈输入信号,也是CCS描绘曲线的数据源,由于滤波深度较大,会不会滤掉电机本体存在的真实抖动,即绘制的曲线失真。
问题2.滤波器截止频率是不是已将远远低于速度环控制带宽,这样的设计是不是不合理
问题3.这样的解释是否合理
“速度反馈通道加入一阶低通滤波器,使引入了一个极点,导致系统滞后,超调量变大甚至震荡。通过加大速度环PI控制器比例系数,加快系统响应,减小超调或避免震荡。”
