


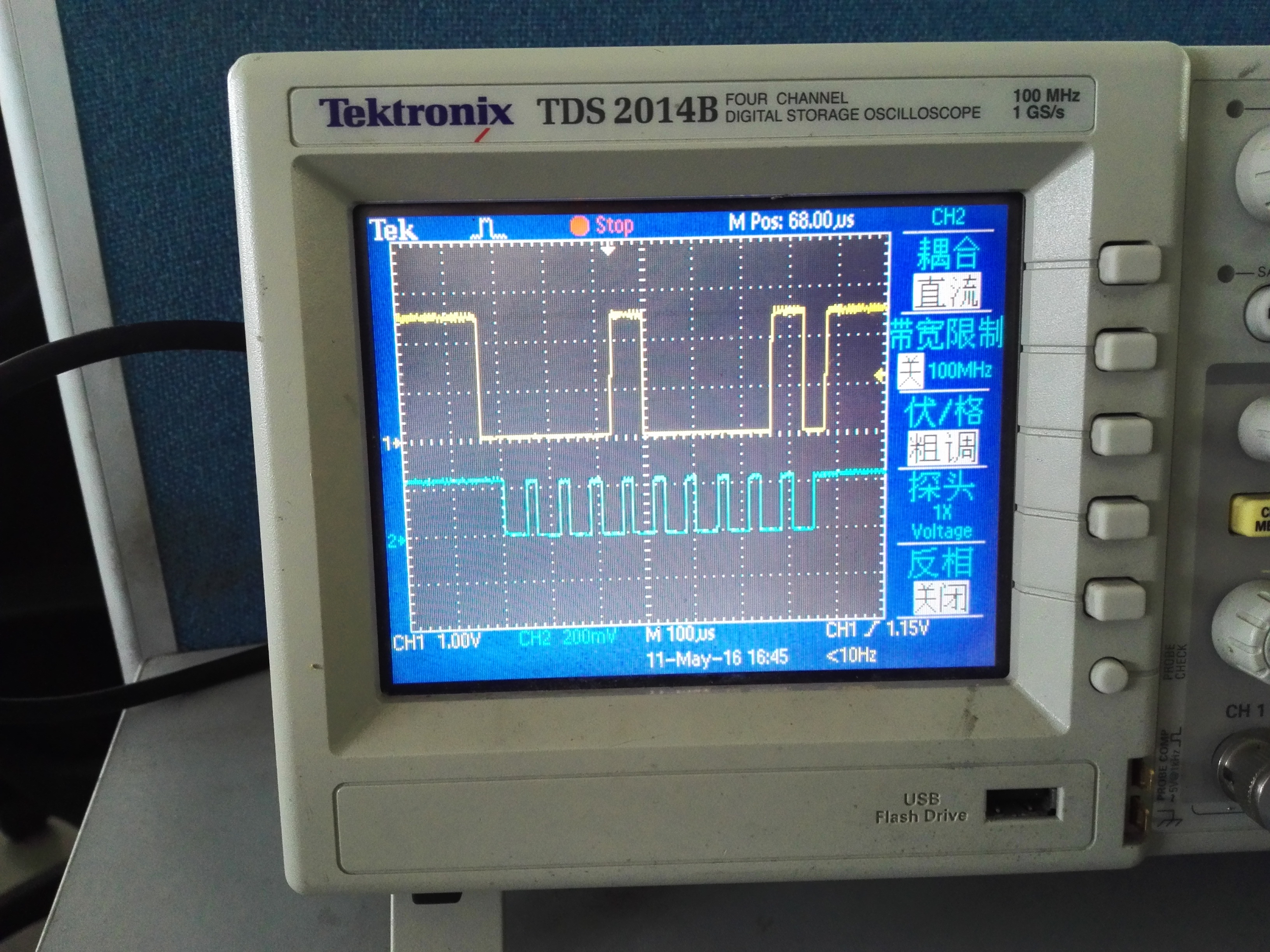
[local]1[/local]最近在用一个电源管理芯片BQ7693003,然后STM32F107在和它通信时,总是收不到应答,大神求助!我用的是模拟I2C,可以和24C02进行读写,和BQ7693003就不行了。
[local]1[/local]
/* defines ------------------------------------------------------------------*/
#define I2C_PageSize 256
#define I2C1_SLAVE_ADDRESS7_W 0x10
#define I2C1_SLAVE_ADDRESS7_R 0x11
#define FALSE 0
#define TRUE 1
#define SDA_PORT GPIOB
#define SCL_PORT GPIOB
#define SDA_PIN GPIO_Pin_7
#define SCL_PIN GPIO_Pin_6
#define SCL_H GPIOB->BSRR = GPIO_Pin_6
#define SCL_L GPIOB->BRR = GPIO_Pin_6
#define SDA_H GPIOB->BSRR = GPIO_Pin_7
#define SDA_L GPIOB->BRR = GPIO_Pin_7
#define SCL_read GPIOB->IDR & GPIO_Pin_6
#define SDA_read GPIOB->IDR & GPIO_Pin_7
/*******************************************************************************
* File Name : SI2C.c
* Author : zhang
* Version : V1.0.0
* Date : 2011.12.08
*******************************************************************************/
#include "I2C.h"
#include "stm32f10x.h"
#include "stm32f10x_it.h"
#include "main.h"
vu8 FRAM_ADDRESS;
/* function ------------------------------------------------------------------*/
/*******************************************************************************
* Function Name : I2CInit
* Description : I2CInit
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void I2CInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//SDA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//SCL
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
SCL_H;
SDA_H;
}
/*******************************************************************************
* Function Name : I2C_delay
* Description : I2C_delay
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void I2C_delay(void)
{
//u8 i=200;
//while(i)
//{
// i--;
//}
Delay_us(10);
}
/*******************************************************************************
* Function Name : I2C_Start
* Description : I2C_Start
* Input : None
* Output : None
* Return : None
*******************************************************************************/
u8 I2C_Start(void)
{
SDA_H;
SCL_H;
I2C_delay();
if(!SDA_read)return FALSE;
SDA_L;
I2C_delay();
if(SDA_read) return FALSE;
SCL_L;
I2C_delay();
return TRUE;
}
/*******************************************************************************
* Function Name : I2C_Stop
* Description : I2C_Stop
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void I2C_Stop(void)
{
SCL_L;
I2C_delay();
SDA_L;
I2C_delay();
SCL_H;
I2C_delay();
SDA_H;
I2C_delay();
}
/*******************************************************************************
* Function Name : I2C_Ack
* Description : I2C_Ack
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void I2C_Ack(void)
{
SCL_L;
I2C_delay();
SDA_L;
I2C_delay();
SCL_H;
I2C_delay();
SCL_L;
I2C_delay();
}
/*******************************************************************************
* Function Name : I2C_NoAck
* Description : I2C_NoAck
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void I2C_NoAck(void)
{
SCL_L;
I2C_delay();
SDA_H;
I2C_delay();
SCL_H;
I2C_delay();
SCL_L;
I2C_delay();
}
/*******************************************************************************
* Function Name : I2C_WaitAck
* Description : I2C_WaitAck
* Input : None
* Output : None
* Return : TRUE/FALSE
*******************************************************************************/
u8 I2C_WaitAck(void)
{
SCL_L;
I2C_delay();
SDA_H;
I2C_delay();
SCL_H;
I2C_delay();
if(SDA_read)
{
SCL_L;
return FALSE;
}
SCL_L;
return TRUE;
}
/*******************************************************************************
* Function Name : I2C_SendByte
* Description : I2C_SendByte
* Input : SendByte
* Output : None
* Return : None
*******************************************************************************/
void I2C_SendByte(u8 SendByte)
{
u8 i=8;
while(i--)
{
SCL_L;
I2C_delay();
if(SendByte&0x80)
SDA_H;
else
SDA_L;
SendByte<<=1;
I2C_delay();
SCL_H;
I2C_delay();
}
SCL_L;
}
/*******************************************************************************
* Function Name : I2C_ReceiveByte
* Description : I2C_ReceiveByte
* Input : None
* Output : None
* Return : ReceiveByte
*******************************************************************************/
u8 I2C_ReceiveByte(void)
{
u8 i=8;
u8 ReceiveByte=0;
SDA_H;
while(i--)
{
ReceiveByte<<=1;
SCL_L;
I2C_delay();
SCL_H;
I2C_delay();
if(SDA_read)
{
ReceiveByte|=0x01;
}
}
SCL_L;
return ReceiveByte;
}
/*******************************************************************************
* Function Name : I2C_FRAM_BufferWrite
* Description : I2C_FRAM_BufferWrite
* Input :
* Output : None
* Return : None
*******************************************************************************/
u8 I2C_FRAM_BufferWrite(u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite)
{
u8 Addr = 0, count = 0;
Addr = (WriteAddr) / I2C_PageSize;
count = (WriteAddr) % I2C_PageSize;
Addr = Addr << 1;
Addr = Addr & 0x0F;
FRAM_ADDRESS = I2C1_SLAVE_ADDRESS7_W | Addr;
if (!I2C_Start())
return FALSE;
I2C_SendByte(FRAM_ADDRESS);
if (!I2C_WaitAck())
{
I2C_Stop(); //在这结束,无应答
return FALSE;
}
I2C_SendByte(count);
I2C_WaitAck();
while(NumByteToWrite--)
{
I2C_SendByte(* pBuffer);
I2C_WaitAck();
pBuffer++;
}
I2C_Stop();
return TRUE;
}
/*******************************************************************************
* Function Name : I2C_FRAM_BufferRead
* Description : I2C_FRAM_BufferRead
* Input :
* Output : None
* Return : None
*******************************************************************************/
u8 I2C_FRAM_BufferRead(u8* pBuffer, u16 WriteAddr, u16 NumByteToRead)
{
u8 Addr = 0, count = 0;
Addr = WriteAddr / I2C_PageSize;
count = WriteAddr % I2C_PageSize;
Addr = Addr << 1;
Addr = Addr & 0x0F;
FRAM_ADDRESS = I2C1_SLAVE_ADDRESS7_R | Addr;
if (!I2C_Start()) return FALSE;
I2C_SendByte(FRAM_ADDRESS);
if (!I2C_WaitAck())
{
I2C_Stop();
return FALSE;
}
I2C_SendByte(count);
I2C_WaitAck();
I2C_Start();
I2C_SendByte(FRAM_ADDRESS | 0x01);
I2C_WaitAck();
while(NumByteToRead)
{
*pBuffer = I2C_ReceiveByte();
if(NumByteToRead == 1)I2C_NoAck();
else I2C_Ack();
pBuffer++;
NumByteToRead--;
}
I2C_Stop();
return TRUE;
}
void main(void)
{
u8 BQ769_INITAdd[11] ={0x00,0x01,0x02,0x04,0x05,0x06,0x07,0x08,0x09,0x0a,0x0b};
u8 BQ769_INITdata[11]={0x08,0x00,0x00,0x10,0x00,0x00,0x00,0x00,0xAC,0x97,0x19};
u8 BQ769_RegAdd[12] ={0x0c,0x0d,0x0e,0x0f,0x51};
u8 BQ769_Voltage[12] ={0};
bsp_init();
I2CInit();
I2C_FRAM_BufferWrite(BQ769_INITdata,BQ769_INITAdd[0],12);
while(1)
{
I2C_FRAM_BufferRead(BQ769_Voltage,BQ769_RegAdd[0],10);
Delay_us(500);
}
}


{kind=link}