


1、我有看到文档介绍,AWR1443适合在20m以内的目标探测,AWR1642能做到100m的目标探测。如图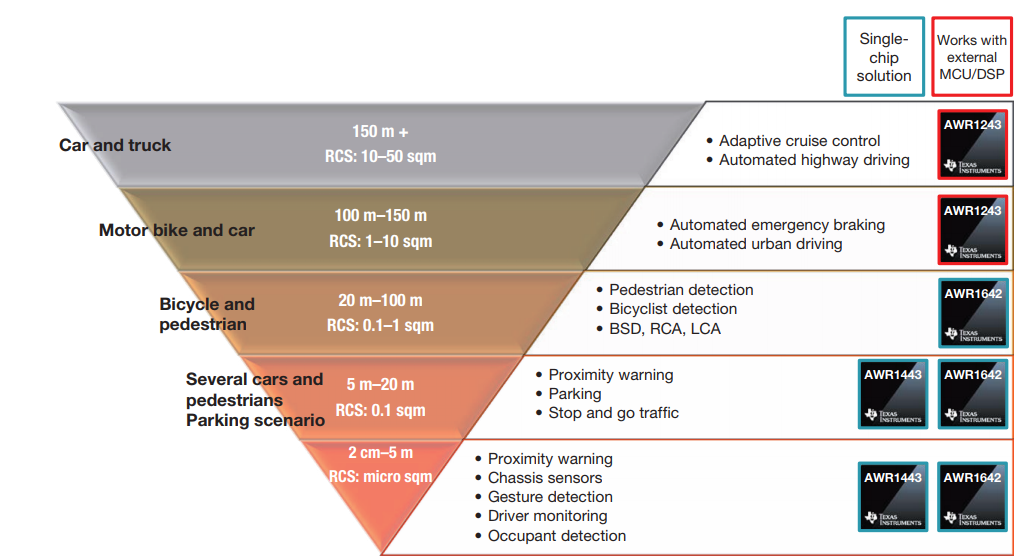 。
。
那如果用AWR1443能否做100m甚至更远的目标探测可以吗?如果可以,是否有参考实例。
2、AWR1443 和AWR1642在数据处理上,一个是采用硬件加速器,一个是采用DSP协处理。
AWR1443在数据处理路径上在第二次FFT后就输出目标的信息,但是AWR1642在第二次FFT后,增加了目标聚合、跟踪等算法。
请问目标聚合、跟踪等算法能否放在AWR1443的硬件加速器做。
1、我有看到文档介绍,AWR1443适合在20m以内的目标探测,AWR1642能做到100m的目标探测。如图。
那如果用AWR1443能否做100m甚至更远的目标探测可以吗?如果可以,是否有参考实例。
2、AWR1443 和AWR1642在数据处理上,一个是采用硬件加速器,一个是采用DSP协处理。
AWR1443在数据处理路径上在第二次FFT后就输出目标的信息,但是AWR1642在第二次FFT后,增加了目标聚合、跟踪等算法。
请问目标聚合、跟踪等算法能否放在AWR1443的硬件加速器做。
