E2E™ 设计支持
搜索
用户
站点
搜索
用户
E2E™ 中文设计支持 >
论坛
放大器
API 解答
音频
时钟和计时
数据转换器
DLP® 产品
接口
隔离
逻辑
微控制器
电机驱动器
处理器
电源管理
射频与微波
传感器
站点支持
开关与多路复用器
工具
无线连接
参考译文
存档组
存档论坛
技术文章
模拟
汽车
DLP® 技术
嵌入式处理
工业
电源管理
TI 培训
快速入门
English
更多
取消
存档论坛
其它模拟产品 (Read-Only)
提及
标签
更多
Cancel
提出相关问题
什么是相关问题?
相关问题是指与本问题有关联性的问题,”相关问题“ 被创建后,会自动链接到当前的原始问题。
提出新问题
提出新问题
Cancel
状态
个回复
1 个回复
名订阅用户
9 名订阅用户
次查看
388 次查看
用户
0 名在线用户
#IWR1642BOOST,希望得到TI的工程师回答
IWR1642
选项
标签
更多
取消
选项
共享
更多
取消
相关
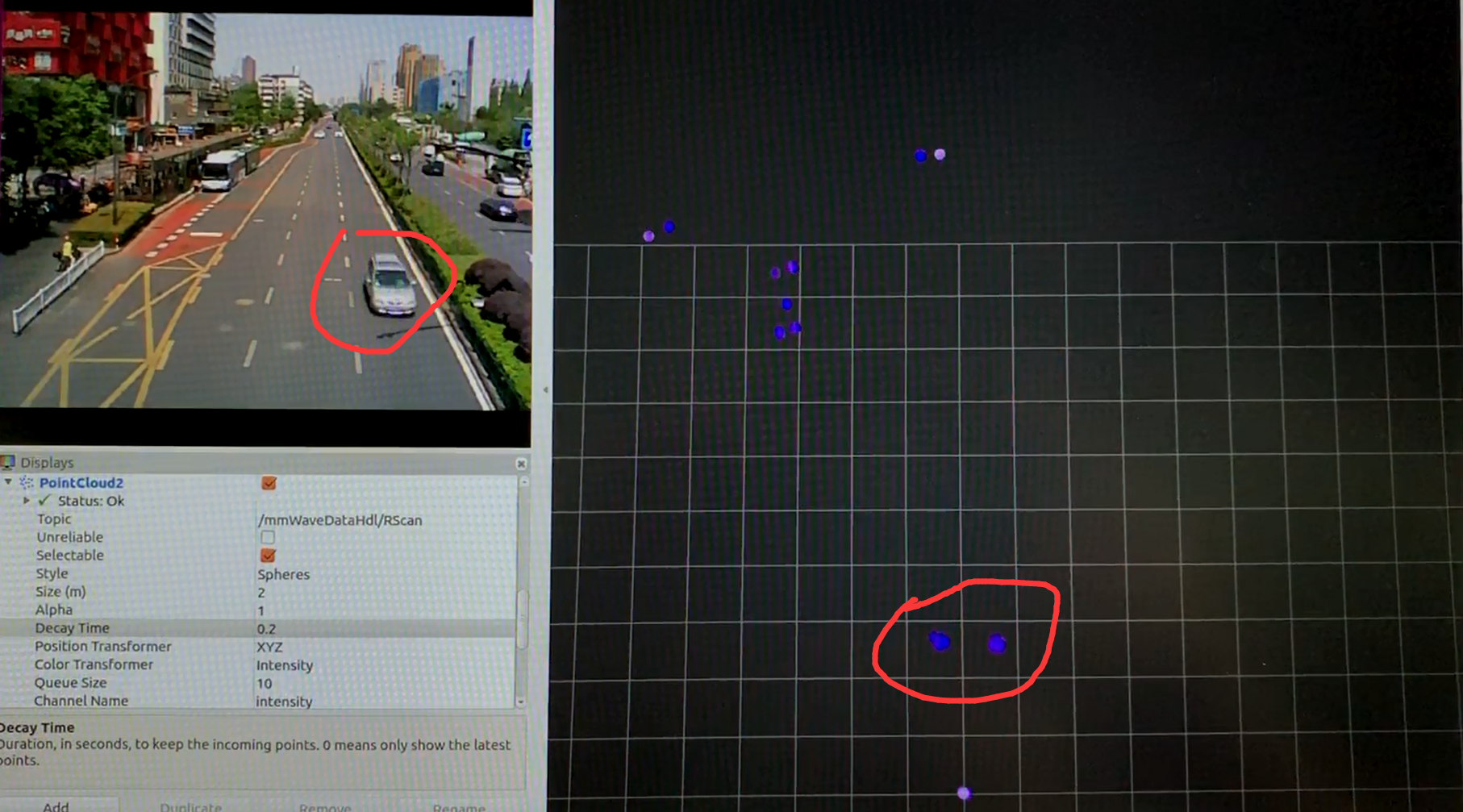
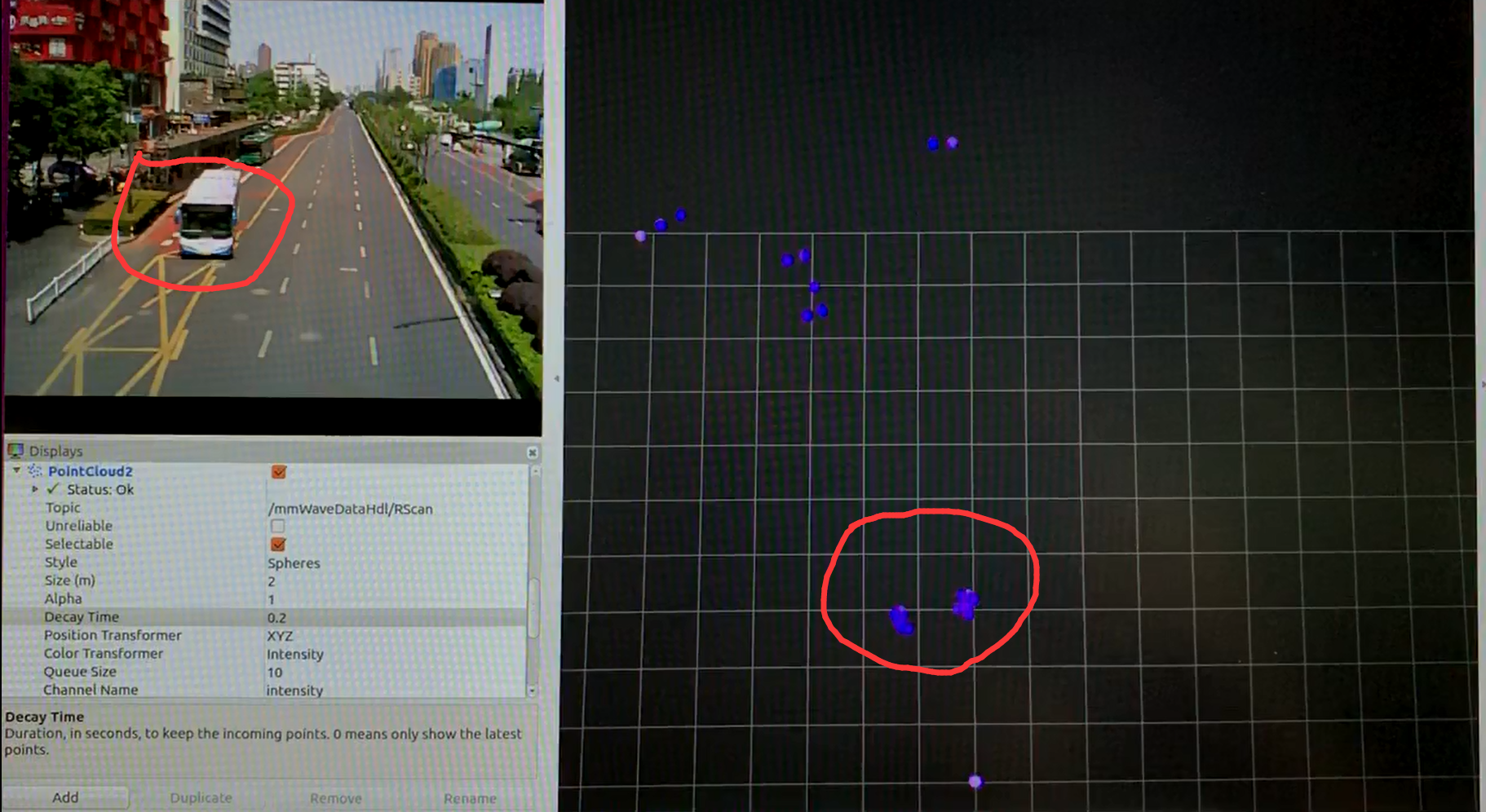
IWR1642 ROS driver中,单个目标在非正前方时会产生两团点云。
user5988744
Prodigy
10
points
这种情况啥的因为雷达角分辨率低吗?能解决吗?
4 年多前
0
Annie Liu
4 年多前
TI__Mastermind
33345
points
您的问题在E2E英文论坛已有工程师跟进,请继续关注。
https://e2e.ti.com/support/sensors/f/1023/t/873052
取消
向上
0
True
向下
取消