Hi,产品上显示ODS版本的俯仰角和方位角都是120°,可是我用3Dpeoplecount测试的时候发现俯仰角并没有那么大,感觉跟ISK的俯仰角差不多,请问如何调整俯仰角的大小?谢谢!
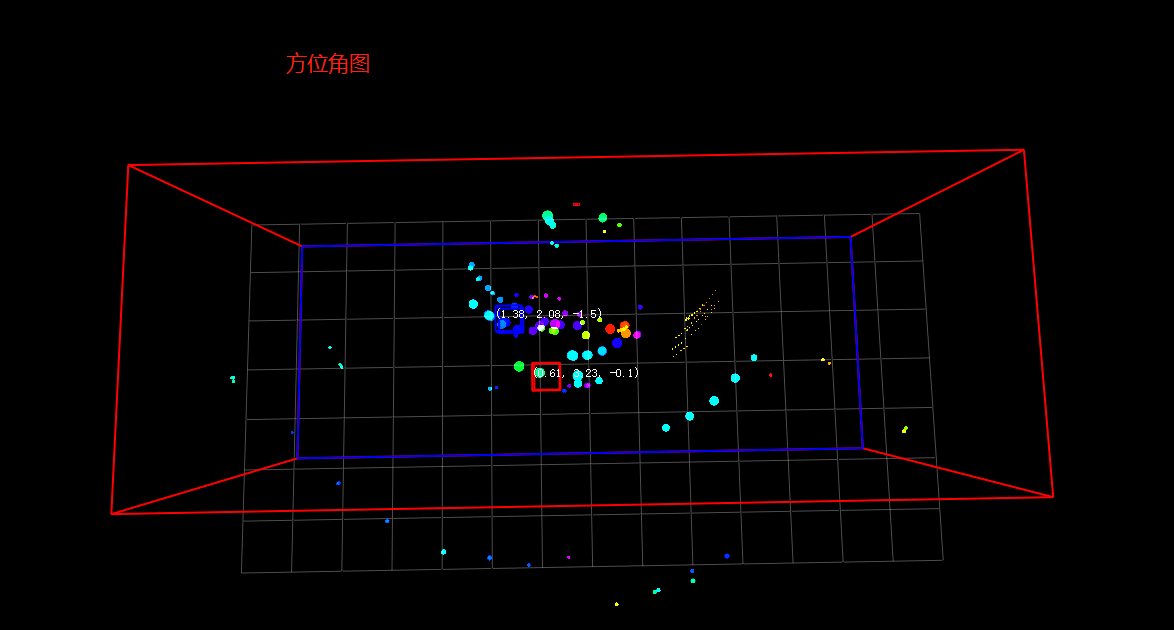
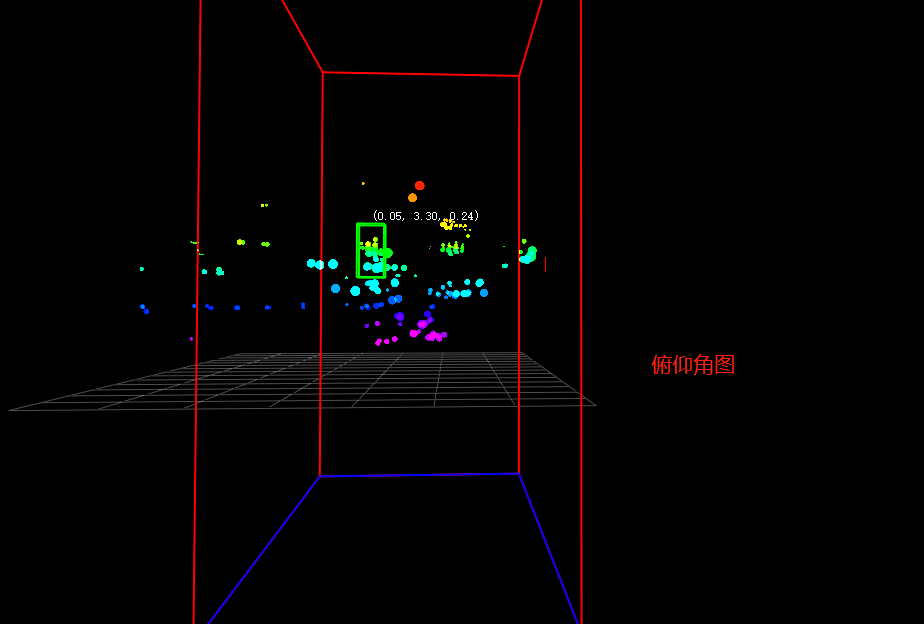
是的,你的方法能够完美解决方位角的需求,同理,我按照类似的方法调整俯仰角的大小,让方位角和俯仰角的大小相等,能够正常运行,但是实际测试俯仰角角度和方位角有些差距。请问还有什么方法可以调整,谢谢!
sensorStopflushCfgdfeDataOutputMode 1channelCfg 15 7 0adcCfg 2 1adcbufCfg -1 0 1 1 1lowPower 0 0profileCfg 0 61 400 7 20 0 0 100 1 64 5333 0 0 48chirpCfg 0 0 0 0 0 0 0 1chirpCfg 1 1 0 0 0 0 0 2chirpCfg 2 2 0 0 0 0 0 4frameCfg 0 2 64 0 120 1 0dynamicRACfarCfg -1 4 4 2 4 8 16 4 4 4.00 4.50 0.50 1 1staticRACfarCfg -1 4 4 2 4 8 16 4 6 8.00 13.00 0.30 0 0dynamicRangeAngleCfg -1 2.00 0.0010 1 0dynamic2DAngleCfg -1 3 0.0300 1 0 1 0.50 0.85 8.00staticRangeAngleCfg -1 1 8 4antGeometry0 0 0 -1 -1 -2 -2 -3 -3 -2 -2 -3 -3antGeometry1 0 -1 -1 0 0 -1 -1 0 -2 -3 -3 -2antPhaseRot 1 -1 -1 1 1 -1 -1 1 1 -1 -1 1fovCfg -1 110.0 110.0compRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 staticBoundaryBox -6 6 0.5 4.8 -6 6boundaryBox -6.5 6.5 0.1 5 -6.5 6.5sensorPosition 6 0 0gatingParam 3 1.5 1.5 1.5 0stateParam 3 3 10 40 5 600allocationParam 150 800 0.001 15 0.8 20maxAcceleration 0.5 0.5 0.5trackingCfg 1 2 1000 20 67 105 50sensorStart