你好,
1.在traffic monitoring交通检测中有如下参数配置:
dfeDataOutputMode 1
channelCfg 15 3 0
adcCfg 2 1
adcbufCfg 0 1 1 1
profileCfg 0 76 3 5 62.65 0 0 10.622 1 312 5510 0 0 48
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
frameCfg 0 1 32 0 50 1 0
lowPower 0 1
guiMonitor 1 0 0 0
cfarCfg 4 60 18 16 8 4 0 63 63 0 1
doaCfg 1 1 1047 3 600 10 100
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
sceneryParam 1 -2 15 10.0 75.0 0 0 0 0 1 1.25 11.0 20.0 50.0 0 0 0 0
gatingParam 12 8 4 0
stateParam 3 10 20 2000 10
allocationParam 60 60 1.0 3 2.8 2.0
variationParam 1.15 0.433 1.0
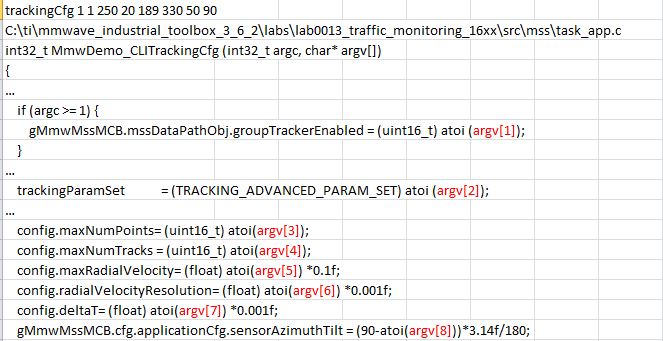
trackingCfg 1 1 250 20 75 470 50 88
sensorStart
其中,1)trackingCfg 1 1 250 20 75 470 50 88
我在其他问题帖子中看到注释含义,如下
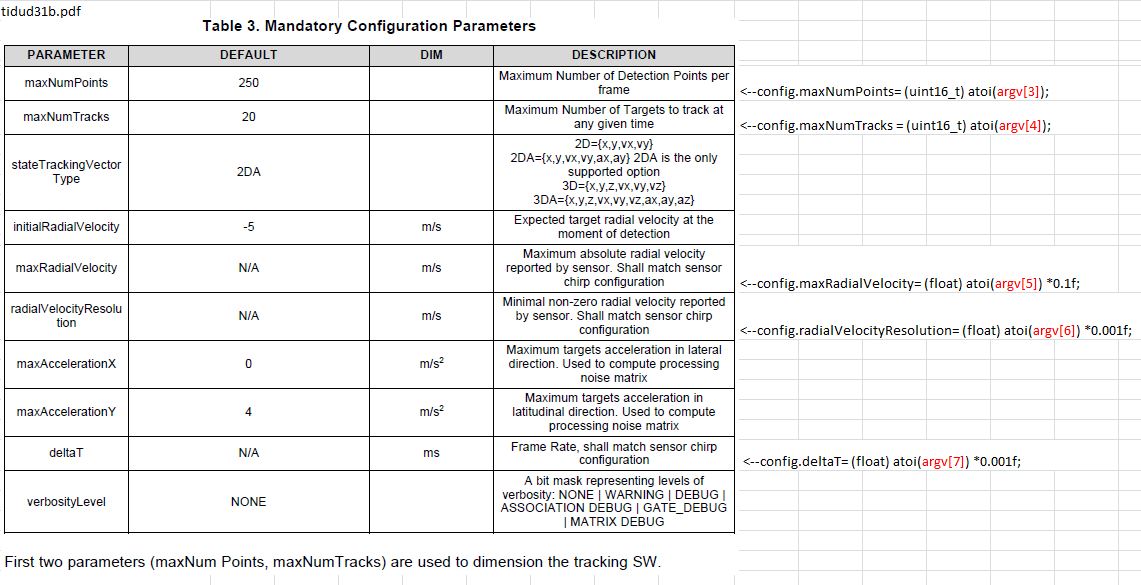
For trackingCfg command that would be trackingCfg: <enable> <paramSet> <numPoints> <numTracks> <maxDoppler> <doppler resolution> <framePeriod> <azimuth angle>
请问<maxDoppler> <doppler resolution>这两项参数的含义?它们对点云数据跟踪处理有何影响?它们和利用profileCfg可以计算出的速度分辨率,最大速度等数值有关系吗?
2)cfarCfg 4 60 18 16 8 4 0 63 63 0 1
在MMWAVE SDK User Guide里的cfarCfg参数解释,我觉得不是十分匹配,可以提供更详细准确的注释吗?
3)allocationParam 60 60 1.0 3 2.8 2.0
增加了第二位<setSNRObscThre> (Minimum total SNR for the allocation set, linear sum of power ratios, when obscured by another target)
我自己另外写了程序(参照lab0006-ros-driver)给开发板传输cfg参数,之前的参数都可以正确接收,并回收到开发板返回确认消息,但到allocationParam参数一定要去掉一个“60” 即改成allocationParam 60 1.0 3 2.8 2.0 才收到参数确认成功消息,后续参数也都配置正常。并没有改动板子烧录的程序,只是在我的PC端换了一下软件,不明白为什么参数个数会减少。希望得到提示和帮助。
2.在people counting的参数中 trackingCfg 1 2 250 20 200 50 90
这和之前TM中的个数、含义似乎也都有点不同,目前也并没有找到相关文档解释,People Counting Customization guide中仅仅提示最后一个数值“90”与安装角度信息相关。可以具体解释一下每个参数的含义吗?
望尽快回复
非常感谢