


作者:TI 华南区现场应用工程师吴杨、曾繁宸
摘要
近年来,扫地机器人市场快速崛起,越来越多用户和厂商在关注这个领域。 TI在该应用下提供种类丰富的模拟以及嵌入式解决方案,帮忙您快速进行选型和设计。扫地机器人系统可以分为以下几个子系统: 电池管理,电源管理,电机驱动,传感器及信号调理,人机交互界面等部分。
扫地机器人系统框图可在TI官网页面浏览:http://www.ti.com.cn/solution/cn/vacuum_robots
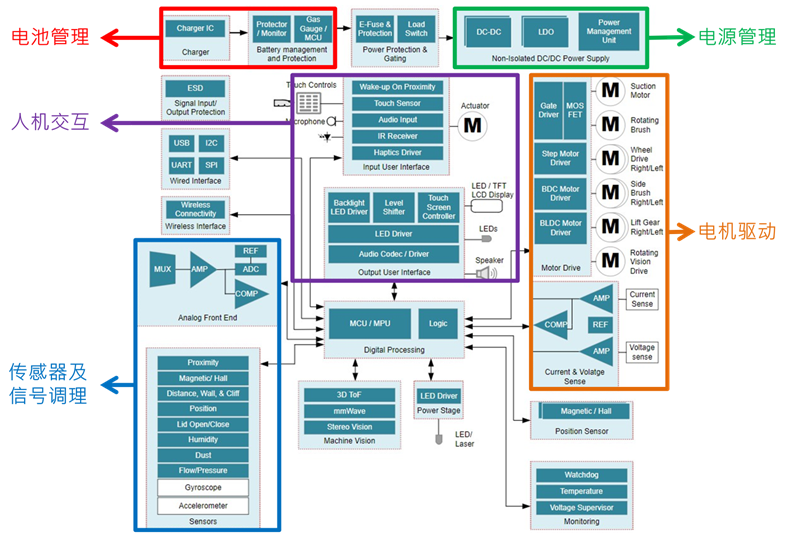
在本系列分享中,将会依次对图中主要子系统进行介绍:
第一节、电池管理
第二节、电源管理
第三节、电机驱动
第四节、传感器及信号调理
第五节、人机交互界面
第二节 电源管理
扫地机器人中的电源管理典型的电源轨如下蓝色框图所示:系统从4串锂电池取电,经过一级降压转换为5V,给到外置模块,部分传感器以及相关逻辑电路供电。 5V还会经过二级降压转换为后级系统所需的3.3V, 1.8V等。一级降压电路通常功耗较大,会选择DCDC变换器。而二级降压电路通常功耗较小,可根据用户实际情况选择LDO或者DCDC。一个典型的扫地机器人电源树如下图所示。

2.1 降压型DCDC
通常来讲,带电池设备为了让运行时间更长,系统会对效率,静态功耗等指标提出要求。 同时,成本同样是非常重要的考虑因素。TI的电源管理产品在性能和成本做到很好的平衡。以下为TI在扫地机器人产品中最受欢迎的一些物料,耐压范围从24V-40V不等,适合用于第一级降压电路:
|
型号 |
输入范围(V) |
输出范围(V) |
输出电流(A) |
特点 |
封装 |
|
TPS56239H |
4.5-24 |
0.8-16 |
2.0 |
|
SOT23-6 |
|
TPS54202 |
4.5-28 |
0.8-25 |
2.0 |
SOT23-6 |
|
|
TPS54302 |
4.5-28 |
0.8-25 |
3.0 |
SOT23-6 |
|
|
TPS54308 |
4.5-28 |
0.8-25 |
3.0 |
SOT23-6 |
|
|
TPS54231/331 |
3.5-4.5 |
0.8-25 |
2/3A |
非同步整流 |
SOT23-6 |
|
TPS54335A |
4.5-28 |
0.8-25 |
3.0 |
频率可调,最高 1.5MHz |
SOP-8 |
|
LMR14006 |
4.5-40 |
1-36 |
0.6 |
固定频率,2.1MHz或1.1Mhz可选 |
SOT23-6 |
|
LMR14020 |
4.5-40 |
1-36 |
2.0 |
|
SOP-8 |
|
LMR14030 |
4.5-40 |
1-36 |
3.0 |
SOP-8 |
|
|
LMR14050 |
4.5-40 |
1-36 |
5 |
SOP-8 |
|
|
TPS560430 |
4.0-36 |
1-35 |
0.6 |
固定频率,2.1MHz或1.1Mhz可选 |
SOT23-6 |
我们以TPS54202举例说明:
该芯片支持最大输入28V持续电压,适合4串锂电池的应用场合。其同步整流的结构可以保证满载时高达98%的效率,同时,由于轻载跳频模式,在轻载情况下可以保证高效,如10mA输出电流情况下效率可达90%以上。
|

2.2 线性稳压LDO
线性稳压相对于降压型DCDC变换器而言,其输出纹波会更小,噪声会更少,有利于扫地机器人系统中的处理器,MCU,还有部分传感器的稳定运行,适合用于第一级降压电路。 因此,在输入输出压差不大的情况下,LDO是电源管理方案的优选。TI提供业内最为广泛的LDO产品。在不同的输入输出电压,电流,封装,压差,静态电流,功耗,噪声指标下,TI都能提供高性价比的方案。
我们以TLV758P为例子说明:
|
TLV758P关键参数说明:
|

|
更多方案选型,可通过以下方式查询: |