


在《DMC MATH_v13.1.pdf》中的RMP_CNTL描述中,有如下设计举例
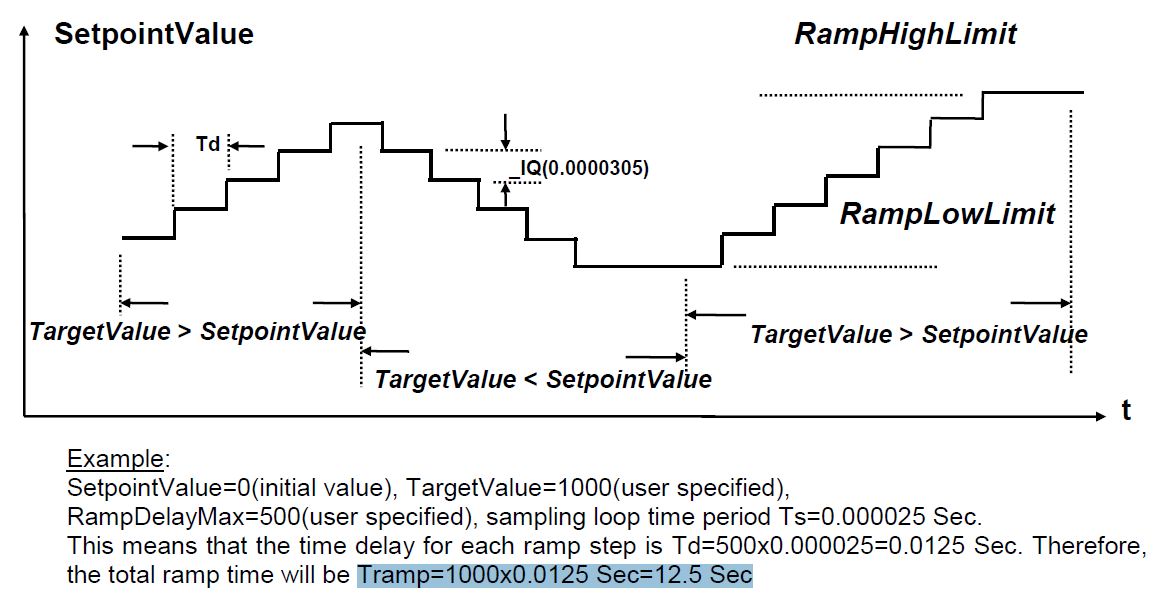
在例子中,目标值是1000,从最后的计算ramp time理解,爬升到目标值得时间等于TargetValue X Td。这是为什么呢?
爬升到目标值的时间t觉得应该等于(TargetValue/步进量)XTd
可是如果这样理解的话步进量又是多少呢?为什么文档里设定的步进量是_IQ(0.0000305)呢?这里的_IQ又是IQ的什么格式呢,是IQ多少呢?
在《DMC MATH_v13.1.pdf》中的RMP_CNTL描述中,有如下设计举例
在例子中,目标值是1000,从最后的计算ramp time理解,爬升到目标值得时间等于TargetValue X Td。这是为什么呢?
爬升到目标值的时间t觉得应该等于(TargetValue/步进量)XTd
可是如果这样理解的话步进量又是多少呢?为什么文档里设定的步进量是_IQ(0.0000305)呢?这里的_IQ又是IQ的什么格式呢,是IQ多少呢?

