大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
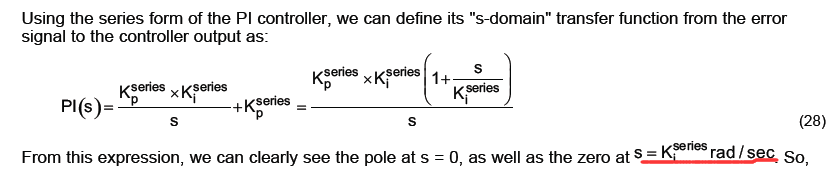
InstaSPIN-FOC and InstaSPIN-MOTION User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
and InstaSPIN-MOTION User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢
大家好
我在用28335做永磁同步机电机的控制
是双电机的控制 控制一个执行机构
传感器是24位绝对式光栅
目前完成了两个永磁同步机的位置和速度控制
性能优化理论依据想参照
InstaSPIN-FOC and InstaSPIN-MOTION User Guide 中的Tuning Regulator ,第393页中的零点为什么是S= Ki Series呢
再有就是393页最后的小信号传函是什么意思呢