


基本情况:
1.MCU:TMS320F28339
2.控制策略:FOC
3.电机基本参数:24对极永磁同步电机,绕组电阻7.25ohm,绕组电感7.9mH
4.母线电压:28V
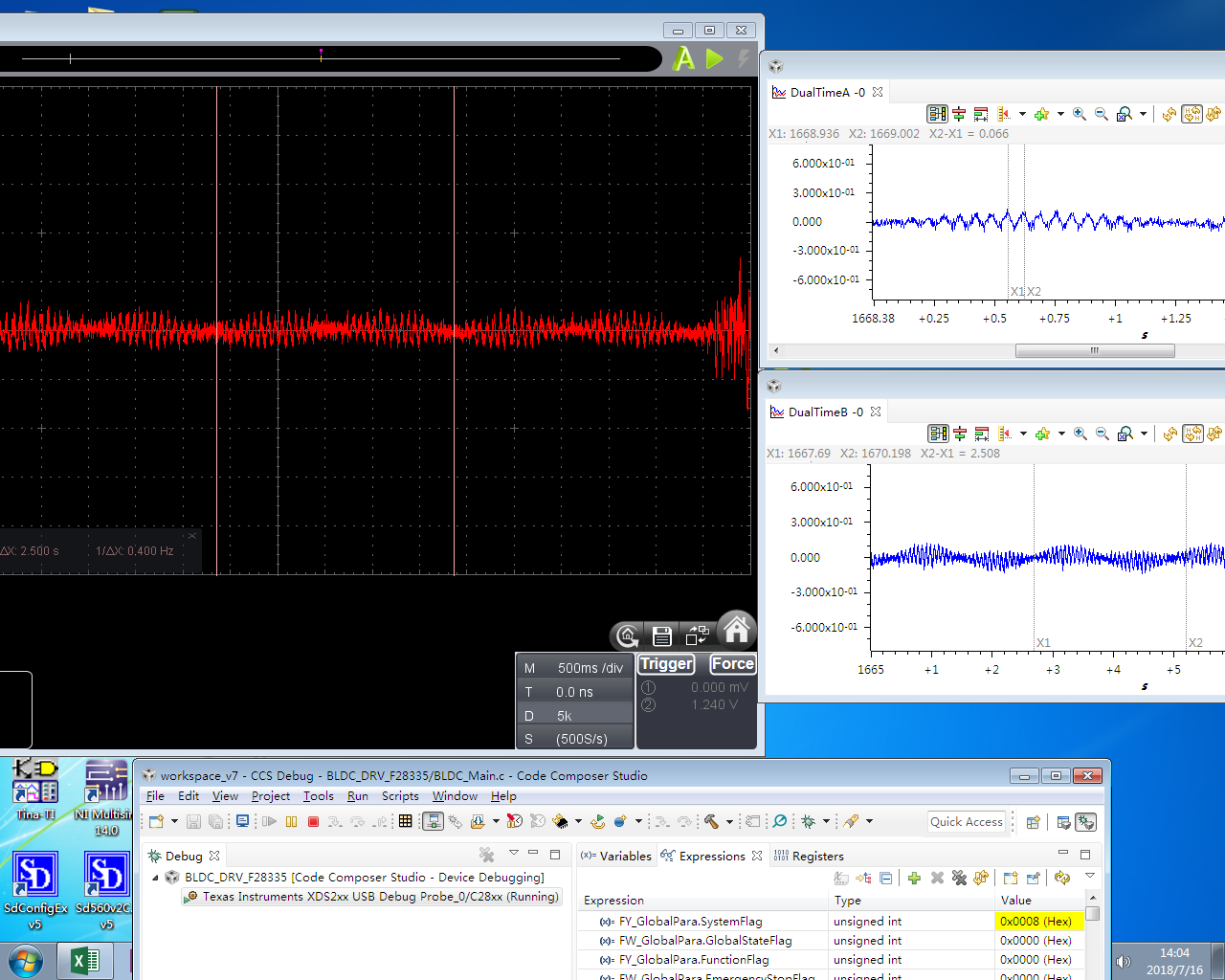
电机开环控制波形如下:
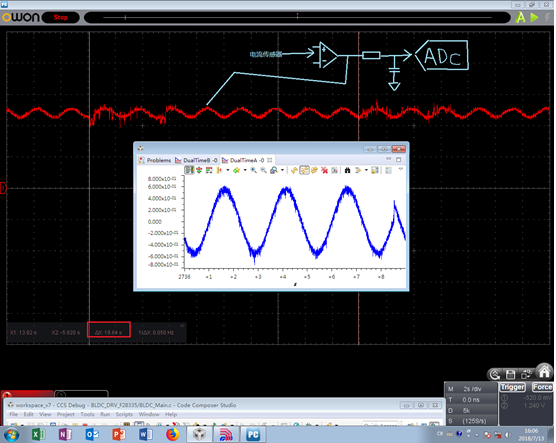
解释:
开环设定转速6度/秒,红色曲线为虚拟示波器测量的电流传感器输出信号,注意测量点位滤波前。
调试过程中发现如果不在ADC前加滤波器,采集噪声较大,依靠软件滤波无法滤除。
蓝色曲线为CCS绘图工具以2ms填充Buffer的方式绘制的曲线,可以看出电流频率为0.4Hz。
转速电流双闭环控制:
PI控制器参数调整前转速、A相电流波形如下图:
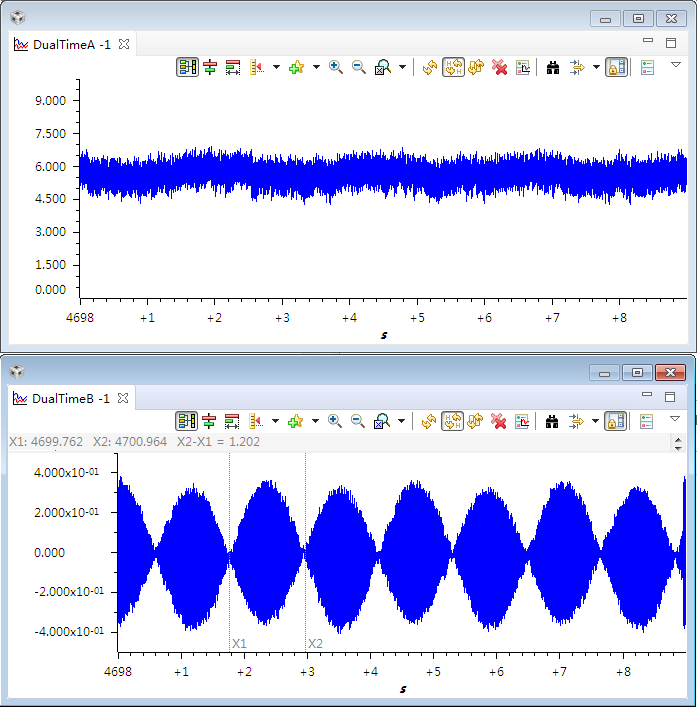
解释:
以上三张图为设定转速6度/秒的转速及A相电流波形,通过CCS以2ms间隔填充buffer的方式绘制
可以看出转速周期性波动,电流不是正弦,似乎按照正弦规律震荡,但是与开环时观测到的正常电流波形相差较多。
28V母线电压,母线电流约40mA。
计算电流环参数过程如下:
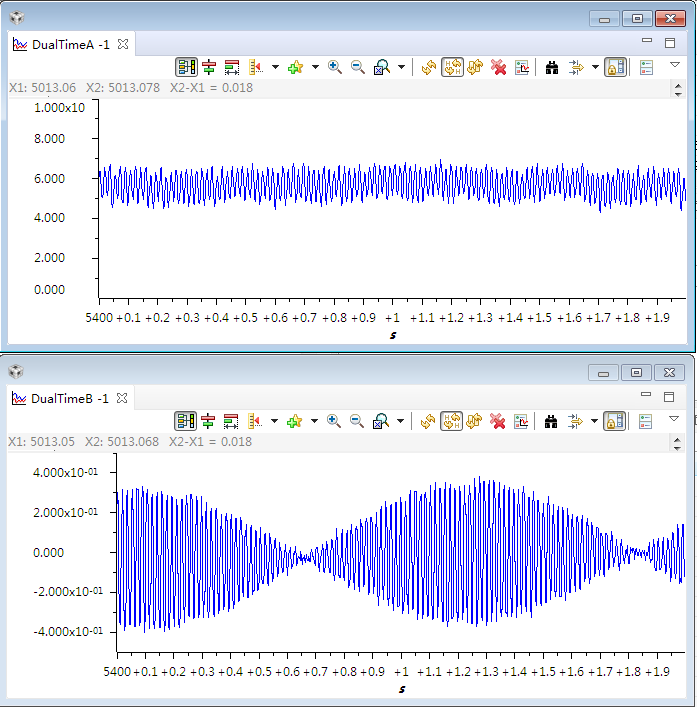
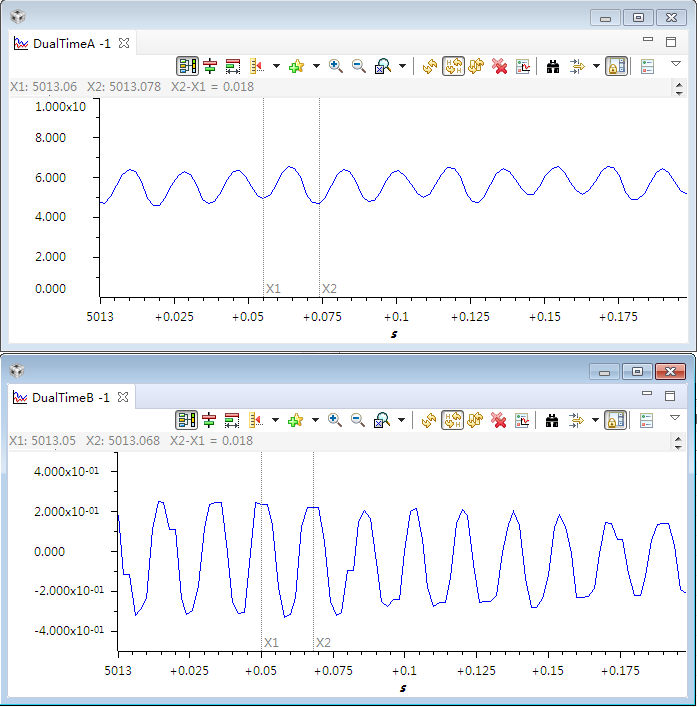
解释:
上图为计算电流环参数之后测得的控制波形
计算过程:
电机电阻:7.25ohm
电机电感:7.9mH
依据这两个参数,计算电流环Ki=917.721519,电流环控制周期为200uS,
因此设定Ki=917.721519 x 0.0002 = 0.1835
Ki乘以电流环控制周期的做法并不确定,在论坛里发帖子提问过,目前没有解答
从TI论坛了解到,电流环带宽与电流环控制频率有关,一般取其1/20,
因此设定电流环带宽为250Hz = 2xPix250 = 1570.7963 rad/S
因此设定Kp=1570.7963 x 0.0079 = 12.4093
将Kp直接设置为这个数值,电源过流保护,尝试把这个数同样乘以0.0002后,就得到了上面的控制曲线,12.4093 x 0.0002 = 0.0025
计算出的Kp乘以电流环控制周期的做法并不确定,按照motorware中的文档猜测的,在论坛里发了帖子,目前没有解答
结论:代入计算的电流环参数后,电流震荡幅度明显减小,震荡频率降低,28V母线电流由40mA减小到约7mA左右,目前存在的震荡可能是速度环参数不合理造成的,目前速度换参数还没有计算。
相关参考:
电流环带宽与电流环控制频率的关系

电流环PI参数的疑问
希望得到大家的指点和帮助
