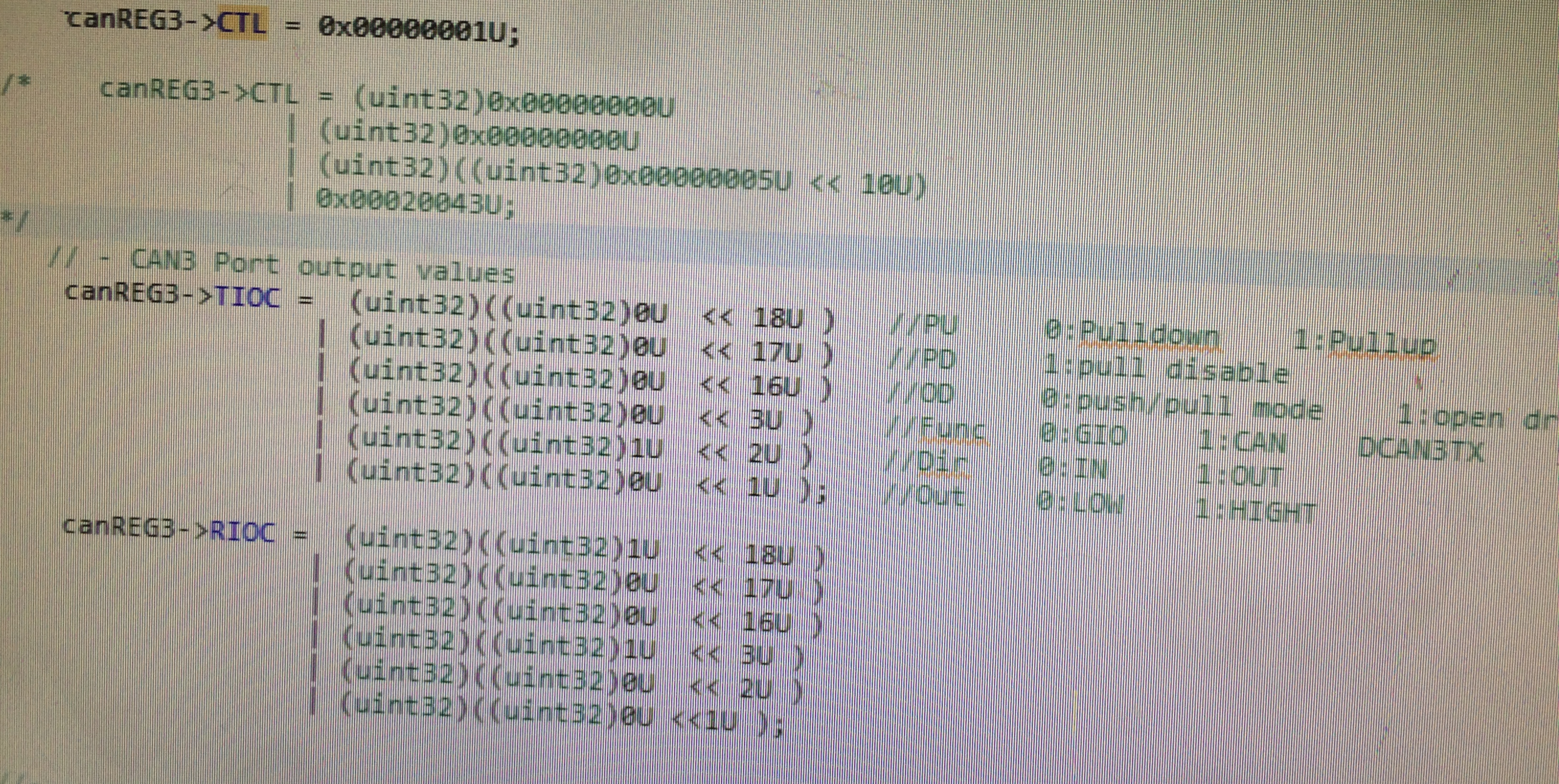
请教:设计中将tms570lc4357的管脚DCAN2TX(H2)和DCAN3TX(M18)用作普通GPIO,在上电瞬间实测发现DCAN2TX(H2)保持为低,而DCAN3TX(M18)则有一段长约200ms的时间为高,之后变低。
请问,期望的结果是上电过程中DCAN2TX(H2)和DCAN3TX(M18)均保持为低,应该如何处理?
以及,是否不管什么批次,tms570lc4357都有以上特性?其他信号(如DCAN1RX、DCAN1TX、DCAN2RX、DCAN2TX、DCAN3RX、DCAN3TX,或其他的GPIO)上电瞬间又都是什么状态?
谢谢