使用MSP430F6736,想使用LPM3.5模式,官网上例程无LPM3.5的相关配置,是否相关例程呢?如何进入。以及使用LPM3.5模式下与LPM3模式有无特别需要注意的。

This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
使用MSP430F6736,想使用LPM3.5模式,官网上例程无LPM3.5的相关配置,是否相关例程呢?如何进入。以及使用LPM3.5模式下与LPM3模式有无特别需要注意的。
参考下其他型号的例程
//******************************************************************************
// MSP430F665x Demo - LPM4.5, Backup RAM
//
// Description: Board is setup to first init all ports, setup for P1.4 lo/hi
// transition interrupt, and start XT1 for setting BAKMEM registers.
// After registers are written, XT1 is disabled, and LPM4.5 is entered.
// Upon a lo/hi transition to P1.4, the device will awaken from LPM4.5
// and attempt to verify if the contents remain as they were programmed
// previous to entering LPM4.5. If so, the LED is lit, if not, the LED
// will blink quickly. If the device was not properly put into LPM4.5
// (see NOTE) before the transition was made, the LED will blink slowly
// NOTE: A backup supply is not required since backup is disabled by setting
// the BAKDIS bit.
//
//
// NOTE: This code example was tested on the MSP-TS430PZ100USB Rev1.2 board.
// To get proper execution of this code example, first switch the JP3
// to external power, and force 3.0V on the VCC pin. Remove JP1 and set
// a multimeter on current reading to ensure proper entrance/exit of
// LPM4.5. Now build the code example and program the device via the
// Debug button. Press "Run" then "Terminate All" buttons. Detatch the
// JTAG interface with the FET from the board. You should read around
// 0.38uA current through JP1. Attatch a jumper wire from P1.4 (Pin 38)
// to Vcc, to trigger a lo/hi transition. The LED on the board should
// light up, signifying a successful verificaiton of the programmed
// values for all four BAKMEM registers.
//
// MCLK = SMCLK = default DCO~1MHz
//
// MSP430F665x
// -----------------
// /|\| |
// | | |
// --|RST |
// /|\ | |
// --o--|P1.4 P1.0|-->LED
// \|/
//
// P. Thanigai
// Texas Instruments Inc.
// May 2012
// Built with IAR Embedded Workbench Version: 5.40 & CCS V5.2
//******************************************************************************
#include <msp430.h>
void Board_Init(void);
void EnterLPM45(void);
void WakeUpLPM45(void);
void SetBAKMEM(void);
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if(SYSRSTIV == 0x08)
{
WakeUpLPM45();
P1DIR |= BIT0; // P1.0 Output
// read backup RAM. if values match, turn on LED. else, clear LED.
if((BAKMEM0==0x0000)&&(BAKMEM1==0x1111)&&(BAKMEM2==0x2222)&&(BAKMEM3==0x3333))
{
while(1)
P1OUT |= BIT0; // all values match, turn on LED
}
else
{
while(1) // Blink LED fast if values don't
{ // all match
P1OUT ^= BIT0;
__delay_cycles(20000);
}
}
}
Board_Init();
SetBAKMEM();
EnterLPM45();
P1DIR |= BIT0; // Code should NOT go here
while(1) // Blink LED slow if not an LPM4.5
{ // Wakeup condition
P1OUT ^= BIT0;
__delay_cycles(500000);
}
}
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=PORT1_VECTOR
__interrupt void Port1_ISR (void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(PORT1_VECTOR))) Port1_ISR (void)
#else
#error Compiler not supported!
#endif
{
PMMCTL0_H = PMMPW_H; // open PMM
PM5CTL0 &= ~LOCKIO; // Clear LOCKBAK and enable ports
PMMCTL0_H = 0x00; // close PMM
P1IFG &= ~BIT4; // Clear P1.4 IFG
__bic_SR_register_on_exit(LPM4_bits); // Exit LPM4.5
__no_operation();
}
void Board_Init(void)
{
// Port Configuration
P1OUT = 0x00;P2OUT = 0x00;P3OUT = 0x00;P4OUT = 0x00;P5OUT = 0x00;P6OUT = 0x00;
P7OUT = 0x00;P8OUT = 0x00;P9OUT = 0x00;PJOUT = 0x00;
P1DIR = 0xFF;P2DIR = 0xFF;P3DIR = 0xFF;P4DIR = 0xFF;P5DIR = 0xFF;P6DIR = 0xFF;
P7DIR = 0xFF;P8DIR = 0xFF;P9DIR = 0xFF;PJDIR = 0xFF;
// P1.4 Interrupt Configuration
P1IES &= ~BIT4; // P1.4 Lo/Hi edge
P1IE = BIT4; // P1.4 interrupt enabled
P1IFG = 0; // P1.4 IFG cleared
// Disable VUSB LDO and SLDO
USBKEYPID = 0x9628; // set USB KEYandPID to 0x9628
// enable access to USB config reg
USBPWRCTL &= ~(SLDOEN+VUSBEN); // Disable the VUSB LDO and the SLDO
USBKEYPID = 0x9600; // disable access to USB config reg
__delay_cycles(10000); // settle FLL
}
void EnterLPM45(void)
{
__enable_interrupt();
// Turn off Clock for LPM4.5 operation
UCSCTL6 |= XT1OFF; // XT1 Off
BAKCTL |= BAKDIS; // Supply power from Vcc, Vbat disabled
PMMCTL0_H = PMMPW_H; // Open PMM Registers for write and set
PMMCTL0_L |= PMMREGOFF; // PMMREGOFF
__bis_SR_register(LPM4_bits); // Enter LPM4.5 mode with interrupts
__no_operation(); // enabled
}
void WakeUpLPM45(void)
{
PMMCTL0_H = PMMPW_H; // open PMM
PM5CTL0 &= ~LOCKIO; // Clear LOCKIO and enable ports
PMMCTL0_H = 0x00; // close PMM
// Restore Port settings
P1OUT = 0x00;P2OUT = 0x00;P3OUT = 0x00;P4OUT = 0x00;P5OUT = 0x00;P6OUT = 0x00;
P7OUT = 0x00;P8OUT = 0x00;P9OUT = 0x00;PJOUT = 0x00;
P1DIR = 0xFF;P2DIR = 0xFF;P3DIR = 0xFF;P4DIR = 0xFF;P5DIR = 0xFF;P6DIR = 0xFF;
P7DIR = 0xFF;P8DIR = 0xFF;P9DIR = 0xFF;PJDIR = 0xFF;
while(BAKCTL & LOCKBAK) // Unlock backup sub system
BAKCTL &= ~(LOCKBAK);
}
void SetBAKMEM(void)
{
// Set backup RAM values
BAKMEM0 = 0x0000;
BAKMEM1 = 0x1111;
BAKMEM2 = 0x2222;
BAKMEM3 = 0x3333;
}
//******************************************************************************
// MSP430F66x Demo - RTC_B, LPM3.5, & alarm
//
// Description: The RTC_B module is used to set the time, start RTC operation,
// and read the time from the respective RTC registers. Software will set the
// original time to 11:59:45 am on Friday June 22,2012. Then the RTC will
// be activated through software, and an alarm will be created for the next
// minute (12:00:00 pm). The device will then enter LPM3.5 awaiting
// the event interrupt. Upon being woken up by the event, the LED on the board
// will be set.
//
// NOTE: This code example was created and tested using the MSP-TS430PZ100USB
// Rev1.2 board. To ensure that LPM3.5 is entered properly, upon opening the
// debug window either hit the "Run Free" button on the dropdown menu next to
// the run button if you are using CCS, or make sure to check that the
// "Release JTAG on GO" option is selected if you are using IAR.
// Also ensure Vcc is tied to Vbat if no backup supply is used
//
// //* An external watch crystal on XIN XOUT is required for ACLK *//
// ACLK = 32.768kHz, MCLK = SMCLK = default DCO~1MHz
//
// MSP430F66xx
// -----------------
// /|\| XIN|-
// | | | 32kHz
// --|RST XOUT|-
// | |
// | P1.0|--> LED
// | Vbat |---
// | | |
// | Vcc |---
// P. Thanigai
// Texas Instruments Inc.
// May 2012
// Built with IAR Embedded Workbench Version: 5.40 & CCS V5.2
//*****************************************************************************
#include <msp430.h>
void Board_Init(void);
void RTC_Init(void);
void EnterLPM35(void);
void WakeUpLPM35(void);
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
if(SYSRSTIV == 0x08)
{
// When woken up from LPM3.5, reinit
WakeUpLPM35();
// If woken up at noon, set LED
if((RTCHOUR == 0x12)&&(RTCMIN == 0x00)&&(RTCSEC == 0x00))
{
P1OUT |= BIT0;
P1DIR |= BIT0;
while(1);
}
// If values do not match, blink LED fast
else
{
while(1) // continuous loop
{
P1OUT ^= BIT0; // XOR P1.0
__delay_cycles(20000); // Delay
}
}
}
// Init board & RTC, then enter LPM3.5
Board_Init();
RTC_Init();
EnterLPM35();
// Code should not get here
// Blink LED slowly if LPM3.5 not entered properly
WakeUpLPM35();
while(1)
{
P1OUT ^= BIT0; // XOR P1.0
__delay_cycles(200000); // Delay
}
}
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=RTC_VECTOR
__interrupt void RTCISR (void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(RTC_VECTOR))) RTCISR (void)
#else
#error Compiler not supported!
#endif
{
PMMCTL0_H = PMMPW_H; // open PMM
PM5CTL0 &= ~LOCKIO; // Clear LOCKBAK and enable ports
PMMCTL0_H = 0x00; // close PMM
RTCCTL0 &= ~RTCTEVIFG;
__bic_SR_register_on_exit(LPM4_bits); // Exit LPM4.5
__no_operation();
}
void Board_Init(void)
{
// Port Configuration
P1OUT = 0x00;P2OUT = 0x00;P3OUT = 0x00;P4OUT = 0x00;P5OUT = 0x00;P6OUT = 0x00;
P7OUT = 0x00;P8OUT = 0x00;P9OUT = 0x00;PJOUT = 0x00;
P1DIR = 0xFF;P2DIR = 0xFF;P3DIR = 0xFF;P4DIR = 0xFF;P5DIR = 0xFF;P6DIR = 0xFF;
P7DIR = 0xFF;P8DIR = 0xFF;P9DIR = 0xFF;PJDIR = 0xFF;
// Disable VUSB LDO and SLDO
USBKEYPID = 0x9628; // set USB KEYandPID to 0x9628
// enable access to USB config reg
USBPWRCTL &= ~(SLDOEN+VUSBEN); // Disable the VUSB LDO and the SLDO
USBKEYPID = 0x9600; // disable access to USB config reg
__delay_cycles(10000); // settle FLL
}
void RTC_Init(void)
{
// Setup Clock
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
while(BAKCTL & LOCKBAK) // Unlock XT1 pins for operation
BAKCTL &= ~(LOCKBAK);
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);
// Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
// Configure RTC_B
RTCCTL01 |= RTCTEVIE + RTCBCD + RTCHOLD; // BCD mode, RTC hold, enable RTC
// event interrupt
RTCYEAR = 0x2012; // Year = 0x2012
RTCMON = 0x06; // Month = 0x06 = June
RTCDAY = 0x22; // Day = 0x22 = 22nd
RTCDOW = 0x05; // Day of week = 0x05 = Friday
RTCHOUR = 0x11; // Hour = 0x11
RTCMIN = 0x59; // Minute = 0x59
RTCSEC = 0x45; // Seconds = 0x45
RTCCTL1 |= RTCTEV_0; // Set RTCTEV for 1 minute alarm
RTCCTL01 &= ~(RTCHOLD); // Start RTC calendar mode
// Turn off Clock for LPM4.5 operation
UCSCTL6 |= XT1OFF; // XT1 Off
}
void EnterLPM35(void)
{
__enable_interrupt();
PMMCTL0_H = PMMPW_H; // Open PMM Registers for write
PMMCTL0_L |= PMMREGOFF; // and set PMMREGOFF
__bis_SR_register(LPM4_bits); // Enter LPM3.5 mode with interrupts
__no_operation(); // enabled
}
void WakeUpLPM35(void)
{
PMMCTL0_H = PMMPW_H; // open PMM
PM5CTL0 &= ~LOCKIO; // Clear LOCKBAK and enable ports
PMMCTL0_H = 0x00; // close PMM
// Restore Port settings
P1OUT = 0x00;P2OUT = 0x00;P3OUT = 0x00;P4OUT = 0x00;P5OUT = 0x00;P6OUT = 0x00;
P7OUT = 0x00;P8OUT = 0x00;P9OUT = 0x00;PJOUT = 0x00;
P1DIR = 0xFF;P2DIR = 0xFF;P3DIR = 0xFF;P4DIR = 0xFF;P5DIR = 0xFF;P6DIR = 0xFF;
P7DIR = 0xFF;P8DIR = 0xFF;P9DIR = 0xFF;PJDIR = 0xFF;
// Restore Clock so that RTC will be read
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
while(BAKCTL & LOCKBAK) // Unlock XT1 pins for operation
BAKCTL &= ~(LOCKBAK);
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);
// Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
// Reconfig/start RTC
RTCCTL01 |= RTCBCD + RTCHOLD;
RTCCTL01 &= ~RTCHOLD;
}
关于LPM3.5 建议您参考下TRM内的内容
http://www.ti.com/lit/ug/slau208q/slau208q.pdf
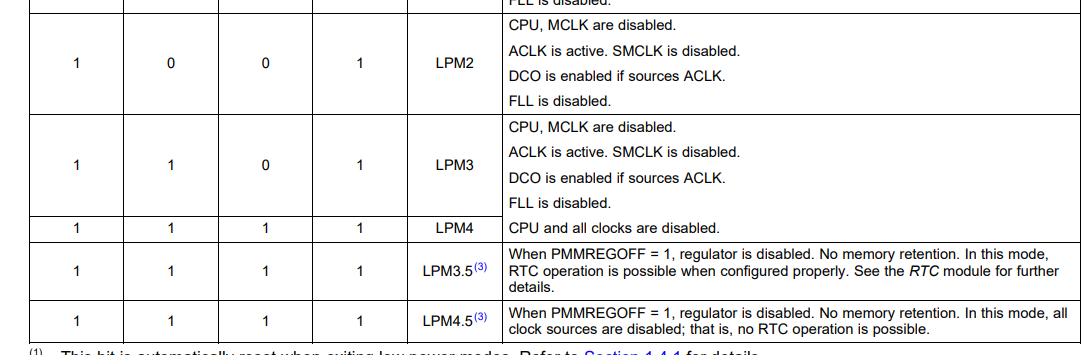
When LPMx.5 (LPM3.5 or LPM4.5) is entered, the voltage regulator of the Power Management Module(PMM) is disabled. All RAM and register contents are lost. Although the I/O register contents are lost, the I/O pin states are locked upon LPMx.5 entry. See the Digital I/O chapter for further details. Wakeup from LPM4.5 is possible from a power sequence, a RST event, or from specific I/O. Wakeup from LPM3.5 is possible from a power sequence, a RST event, RTC event, or from specific I/O.
以及
1.4.2 Entering and Exiting Low-Power Modes LPMx.5