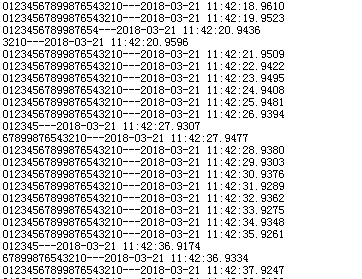
在做MSP430F5438A的串口通讯的时候发送一帧数据,这帧数据很多时候会被分开发送,中间间隔多达16ms,请帮忙分析下是什么问题引起的,源代码如下:
#include "main.h"
#define P90_ON (P9OUT |= BIT0)
#define P90_OFF (P9OUT &=~BIT0)
unsigned char send_data[20]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39,0x39,0x38,0x37,0x36,0x35,0x34,0x33,0x32,0x31,0x30};
//unsigned char send_data[2]={0,1};
unsigned char i=0;
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; //停止看门狗
P9DIR |= BIT0;
P90_OFF;
System_Init();
// _EINT();
while(1)
{
delay_ms(1000);
if(i==0)
{
P90_ON;
UART3_SendStr(&send_data[0],20);
i++;
}
else if(i==1)
{
P90_OFF;
UART3_SendStr(&send_data[0],20);
i=0;
}
}
}
void delay_ms(int num)
{
while(num--)
__delay_cycles(20000);
}
void UART3_SendStr(unsigned char *dat,unsigned char k)
{
while(k--)
{
UCA3TXBUF = *dat++; // TX -> RXed character
while (!(UCA3IFG&UCTXIFG)); // USCI_A0 TX buffer ready?
}
}
#include "system.h"
void SetVcoreUp (unsigned int level)
{
// Open PMM registers for write
PMMCTL0_H = PMMPW_H;
// Set SVS/SVM high side new level
SVSMHCTL = SVSHE + SVSHRVL0 * level + SVMHE + SVSMHRRL0 * level;
// Set SVM low side to new level
SVSMLCTL = SVSLE + SVMLE + SVSMLRRL0 * level;
// Wait till SVM is settled
while ((PMMIFG & SVSMLDLYIFG) == 0);
// Clear already set flags
PMMIFG &= ~(SVMLVLRIFG + SVMLIFG);
// Set VCore to new level
PMMCTL0_L = PMMCOREV0 * level;
// Wait till new level reached
if ((PMMIFG & SVMLIFG))
while ((PMMIFG & SVMLVLRIFG) == 0);
// Set SVS/SVM low side to new level
SVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level;
// Lock PMM registers for write access
PMMCTL0_H = 0x00;
}
void UCS_Init(void)
{
unsigned int N_FLL=0;
UCSCTL3 |= SELREF_2; // Set DCO FLL reference = REFO 32768HZ
UCSCTL4 |= SELA_3; // Set ACLK = REFO
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
UCSCTL1 = DCORSEL_6; // Select DCO range 50MHz operation
N_FLL = 609;//
UCSCTL2 = FLLD_1 + N_FLL; // Set DCO Multiplier for 25MHz
__bic_SR_register(SCG0); // Enable the FLL control loop
__delay_cycles(781250);
}
void UART_Init(void)
{
P10SEL |= BIT4+BIT5; // P10.4,5 = USCI_A3 TXD/RXD
UCA3CTL1 |= UCSWRST; // **Put state machine in reset**
UCA3CTL1 |= UCSSEL_2; // SMCLK +睡眠
UCA3BR0 = 0xAD; // 20M 115200 (see User's Guide)2604
UCA3BR1 = 0x00; // 20M 115200 (see User's Guide)
UCA3MCTL |= UCBRS_2 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA3CTL1 &= ~UCSWRST;
}
void System_Init(void)
{
SetVcoreUp(PMMCOREV_1); //12M
SetVcoreUp(PMMCOREV_2); // Set VCore to 1.8MHz for 20MHz
SetVcoreUp(PMMCOREV_3); //25M
UCS_Init();
UART_Init();
}