


作者:TI 华南区现场应用工程师吴杨、曾繁宸
摘要
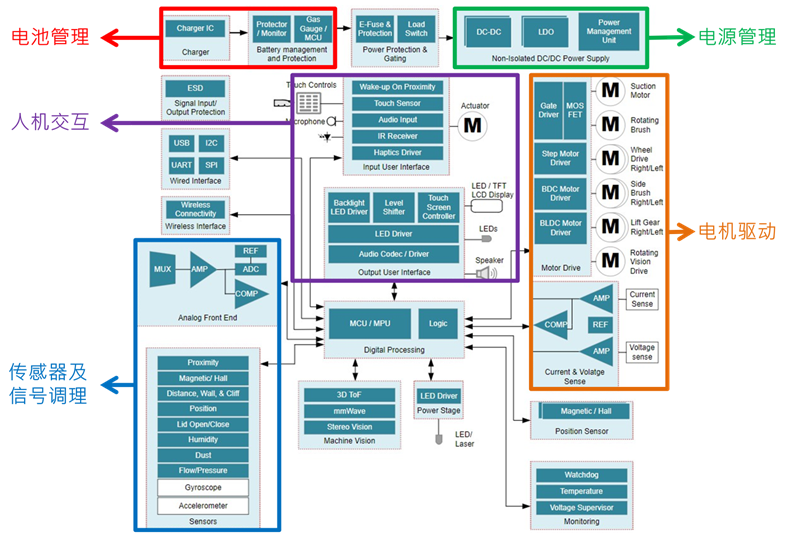
近年来,扫地机器人市场快速崛起,越来越多用户和厂商在关注这个领域。 TI在该应用下提供种类丰富的模拟以及嵌入式解决方案,帮忙您快速进行选型和设计。扫地机器人系统可以分为以下几个子系统: 电池管理,电源管理,电机驱动,传感器及信号调理,人机交互界面等部分。
扫地机器人系统框图可在TI官网页面浏览:http://www.ti.com.cn/solution/cn/vacuum_robots
在本系列分享中,将会依次对图中主要子系统进行介绍:
第一节、电池管理
第二节、电源管理
第三节、电机驱动
第四节、传感器及信号调理
第五节、人机交互界面
第三节 电机驱动
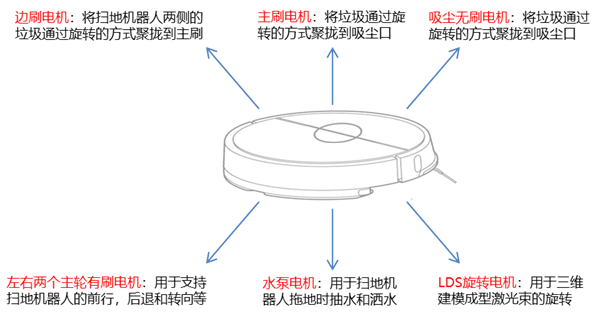
典型的扫地机器人产品中有非常多需要用到电机驱动的场合,如: 左右轮子,主刷,边刷,水泵,吸尘电机,LDS旋转座等。 TI针对不同的电机类型以及负载大小有非常全面的产品目录可供选择。
以主轮驱动应用为例说明:
主轮的电机通常为12V的直流有刷电机。 承担的前转,后转,里程记录,堵转检测等功能。TI的DRV8870有刷电机驱动产品,配合TI超高性价比运放TLV9061,可以完美实现以上所有功能。TI同时还提供实现该功能的参考设计TIDA-01588, 通过注册官网myTI,可以免费浏览,下载该参考设计的设计文档,原理图,测试文档等源文件。
该参考设计基本架构如下所示:
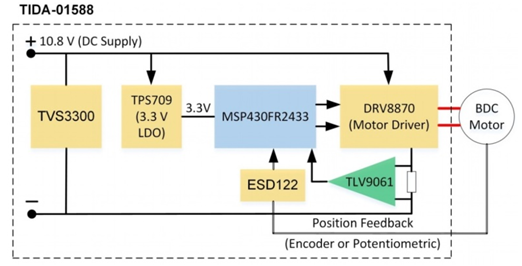
如图所示,系统电源为10.8V DC,跨接一个TVS保护,通过DRV8870来驱动有刷电机BDC。10.8V DC经过LDO线性稳压器TPS709给微控制器MSP430FR2433供电,微控制器给DRV8870发出指令控制电机,实现扫地机器人主轮的正转,反转,刹车,空挡滑行等功能。同时DRV8870通过外置采样电阻,结合运放TLV9061进行电流检测,实现堵转检测等功能。位于电机上的光电计数器或者霍尔传感器信号通过ESD接口芯片ESD122反馈到微控制器,可以实现电机测试历程记录等功能。
|
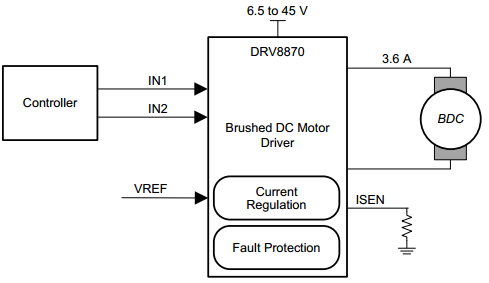
更多详情,请参阅DRV8870数据手册。
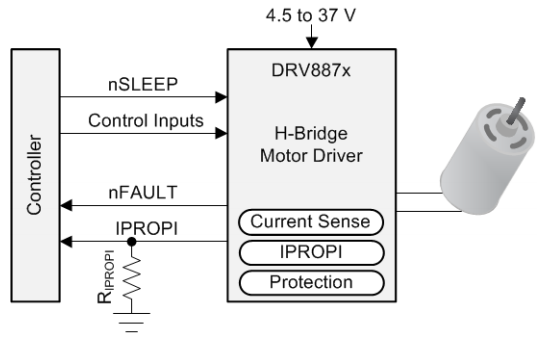
除了该参考设计中所推荐的DRV8870外,TI还有以下具有特色的方案值得推荐:DRV8876。以下是款产品的介绍: DRV8876是一款高集成度 H桥驱动器,内置N-MOSFET,charge pump,电流采样转换,以及各类保护电路。非常适合用于扫地机器人的主轮驱动,或者主刷驱动。DRV8876最大的亮点在于超高集成度,通过内置采样电路和信号调理,实现堵转检测。与传统的驱动方案(如DRV8870)相比,可以节省设计者的一颗功率采样电阻,以及一颗堵转检测的运放。
另外,DRV8876可以通过设置睡眠模式来保持超低的待机功耗(<1uA),以保证扫地机器人电池能最大限度节能。
|
更多详情,请参阅DRV8846数据手册。
更多TI电机驱动的产品,可以在官网中获得:http://www.ti.com/motor-drivers/overview.html