请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TL072 大家好、
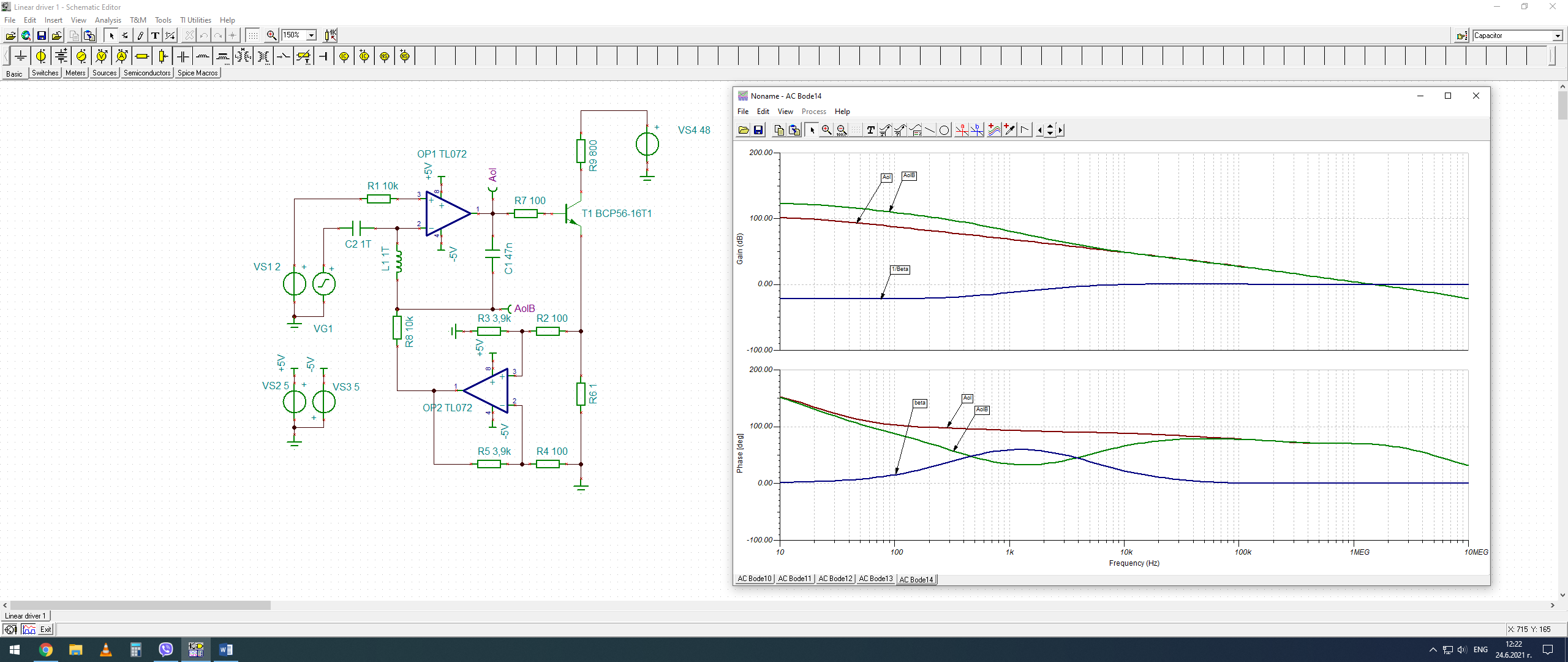
我目前正在设计基于运算放大器的16位 LED 驱动器,用于控制14个高 CRI LED 阵列。
我在 PCB 上构建了下面显示的原理图、但稳定性有一些问题。 我在反馈电路中为电容器和电阻器尝试了很多不同的值。 我最后尝试的是 C1 = 47n、R7 = 100R、R8 = 10k。 利用这些值、输出电流或多或少是稳定的。 电路非常慢,对设定电流的变化反应不快。 始终需要一段时间才能稳定在设定点。 由于控制环路中有小电容、电路非常不稳定、并开始振荡。 仿真结果非常不清楚。 控制源是16位 DAC。 确保没有问题。
如果您有改进建议、请分享。
提前感谢。
此致。
Yordan Nedev