请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1230E6PM 主题中讨论的其他器件:PCF8574
大家好、我遇到了 I2C 的 tivaware 命令问题。 我需要向安装在小型 PCA 上的 I2C 从设备(MCP23017 16位 IO 扩展器)发送两个字节的信息。 我已验证 PCA 是否可以与 Arduino 和示例代码一起正常工作。
根据 SPMA073、I2C_MASTER_CMD_BURST_SEND_START 应发送开始位、从器件地址、清除的写入位以及 I2CMDR 中通过 I2CMDataPut 输入的附加字节命令。 然后、可以使用 I2C_MASTER_CMD_BURST_SEND_FINISH 发送数据的第二个字节。 这基本上意味着以这种方式发送起始位、从地址、写入位和两个字节。
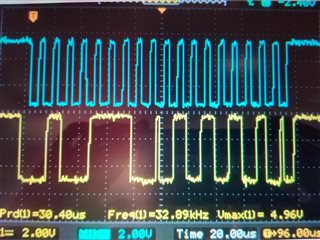
我的问题是 I2C_MASTER_CMD_BURST_SEND_START 似乎不发送在 I2CMDR 中输入的字节。 请参阅下面的代码以及随附的 I2C 在总线上发送的示波器截图。 如果我的代码不正确、或者对流程的工作方式有误解、请告知我。 感谢所有回复。
#include <__cross_studio_io.h>
#include <stdarg.h>
#include <stdbool.h>
#include <stdint.h>
#include <stdio.h>
#include "inc/hw_i2c.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "inc/hw_ints.h"
#include "driverlib/i2c.h"
#include "driverlib/interrupt.h"
#include "driverlib/sysctl.h"
#include "driverlib/timer.h"
#include "driverlib/gpio.h"
#include "driverlib/uart.h"
#include "driverlib/pin_map.h"
#include "driverlib/debug.h"
#include "driverlib/rom.h"
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
uint8_t opcode = 0x27; //MCP23017 with A0 through A2 set as High
//initialize I2C module 5
void InitI2C5(void)
{
//enable I2C module 0
SysCtlPeripheralDisable(SYSCTL_PERIPH_I2C5);
SysCtlPeripheralReset(SYSCTL_PERIPH_I2C5);
SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C5);
while(!SysCtlPeripheralReady(SYSCTL_PERIPH_I2C5));
// Enable and initialize the I2C5 master module. Use the system clock for
// the I2C5 module. The last parameter sets the I2C data transfer rate.
// If false the data rate is set to 100kbps and if true the data rate will
// be set to 400kbps.
I2CMasterInitExpClk(I2C5_BASE, SysCtlClockGet(), false);
//enable GPIO peripheral that contains I2C 5
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
// Configure the pin muxing for I2C5 functions on port B6 and B7.
GPIOPinConfigure(GPIO_PB6_I2C5SCL);
GPIOPinConfigure(GPIO_PB7_I2C5SDA);
// Select the I2C function for these pins.
GPIOPinTypeI2CSCL(GPIO_PORTB_BASE, GPIO_PIN_6);
GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_7);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOC);
SysCtlDelay(1);
//
// Configure LED pins as outputs.
//
GPIOPinTypeGPIOOutput(GPIO_PORTC_BASE, GPIO_PIN_5 | GPIO_PIN_6);
}
void main(void)
{
// Set the clocking to run directly from the external crystal/oscillator.
SysCtlClockSet(SYSCTL_SYSDIV_4 | SYSCTL_USE_PLL | SYSCTL_XTAL_16MHZ | SYSCTL_OSC_MAIN);
//initialize I2C module 5
InitI2C5();
//Turn I2C power on.
GPIOPinWrite(GPIO_PORTC_BASE, GPIO_PIN_5, GPIO_PIN_5);
while(1)
{
//Turn Red LED on.
//GPIOPinWrite(GPIO_PORTC_BASE, GPIO_PIN_6, GPIO_PIN_6);
SysCtlDelay(5000000);
// Wait until MCU is done transferring.
while(I2CMasterBusBusy(I2C5_BASE)) {}
// Tell the master module what address it will place on the bus when
// communicating with the slave.
I2CMasterSlaveAddrSet(I2C5_BASE, opcode, false);
//-------------------------------------------------------------------
//Configure MCP23017 IODIRB output pins
//put data to be sent into FIFO
I2CMasterDataPut(I2C5_BASE, 0x13);
//Initiate send of data from the MCU
I2CMasterControl(I2C5_BASE, I2C_MASTER_CMD_BURST_SEND_START);
// Wait until MCU is done transferring.
while(I2CMasterBusBusy(I2C5_BASE)) {}
//Check for errors
if (I2CMasterErr(I2C5_BASE) != I2C_MASTER_ERR_NONE)
{
//Turn Red LED on.
GPIOPinWrite(GPIO_PORTC_BASE, GPIO_PIN_5, GPIO_PIN_5);
}
//put data to be sent into FIFO
I2CMasterDataPut(I2C5_BASE, 0x55);
//Initiate send of data from the MCU
I2CMasterControl(I2C5_BASE, I2C_MASTER_CMD_BURST_SEND_FINISH);
// Wait until MCU is done transferring.
while(I2CMasterBusBusy(I2C5_BASE)) {}
//Check for errors
if (I2CMasterErr(I2C5_BASE) != I2C_MASTER_ERR_NONE)
{
//Turn Red LED on.
GPIOPinWrite(GPIO_PORTC_BASE, GPIO_PIN_5, GPIO_PIN_5);
}
//-------------------------------------------------------------------
//Turn Red LED off.
//GPIOPinWrite(GPIO_PORTC_BASE, GPIO_PIN_6, 0);
SysCtlDelay(5000000);
}
}