请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 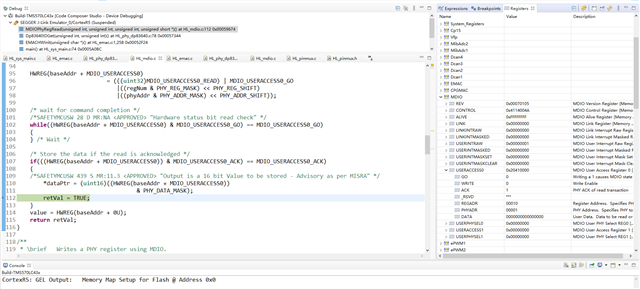
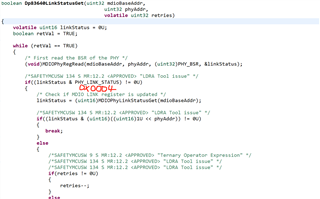
这是我的代码调试屏幕截图。 当运行函数以获取 PHY ID 时、USERACCESS0寄存器中的数据始终保持为0。 我无法确定原因。
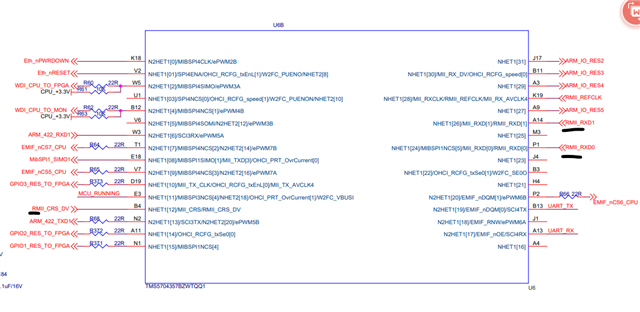
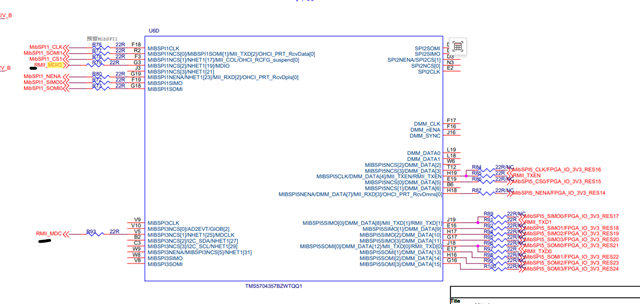
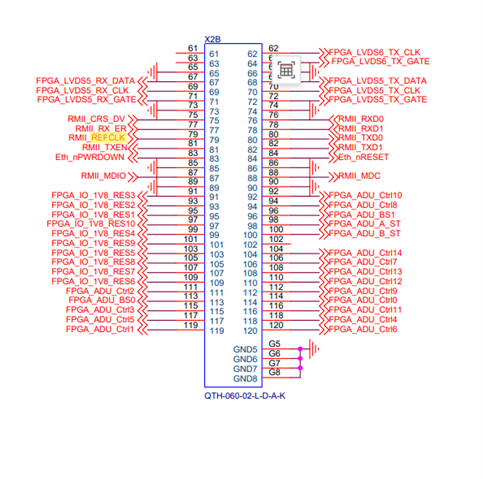
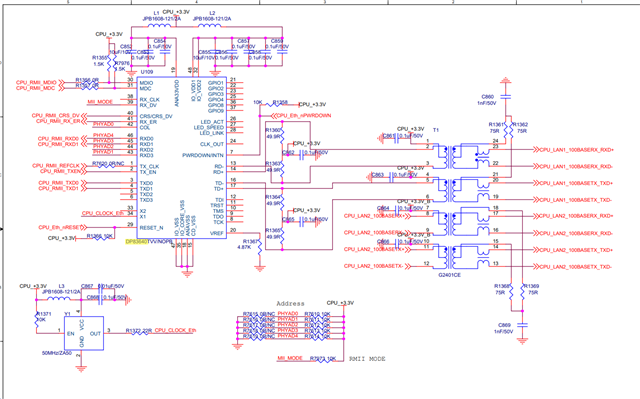
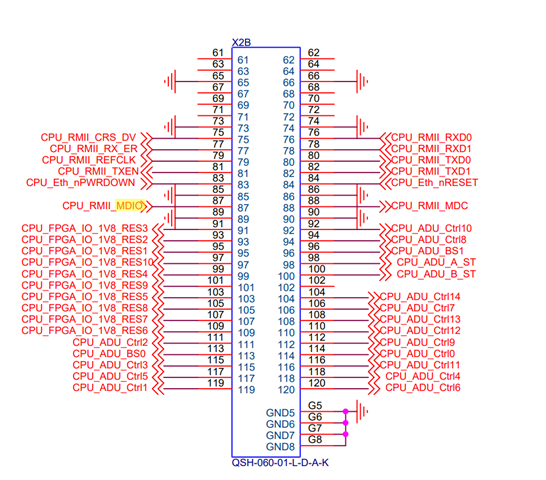
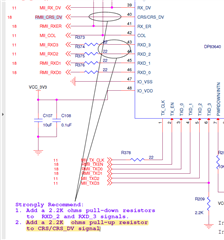
这是我的硬件原理图。 TMS570LC4357芯片通过连接器连接到 PHY 芯片。 请帮助我检查硬件是否有任何错误。
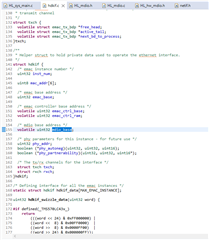
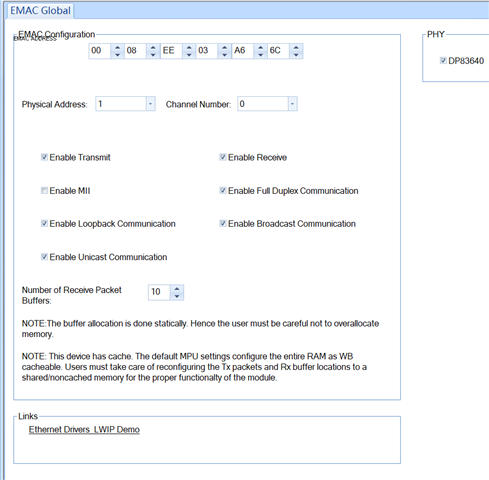
我的代码使用的是官方示例项目 v00.04..00。 我EMACHWInit(emacAddress);在main函数中添加了代码、但无法成功初始化、并且无法获取 PHYID。

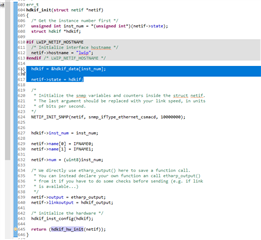
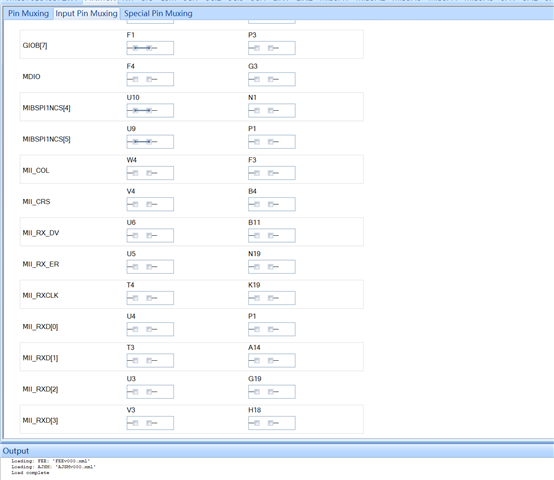
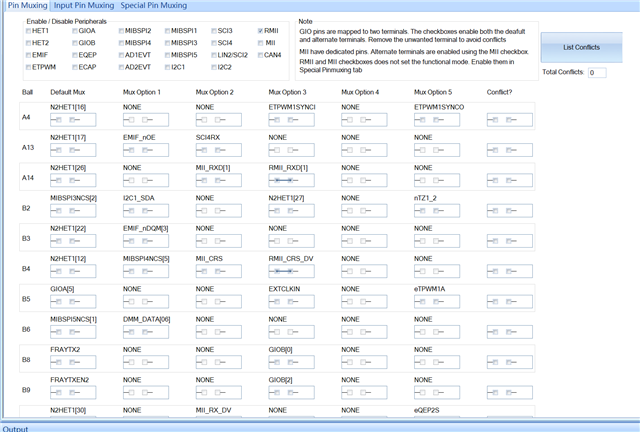
在上述项目中、使用 HCG 所做的修改如下:
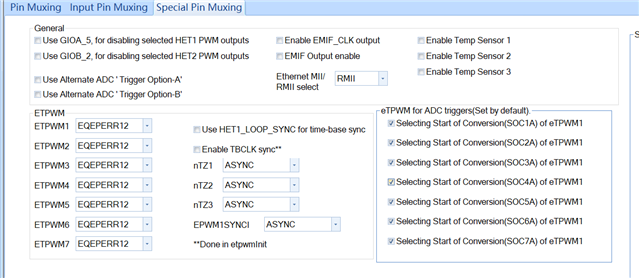
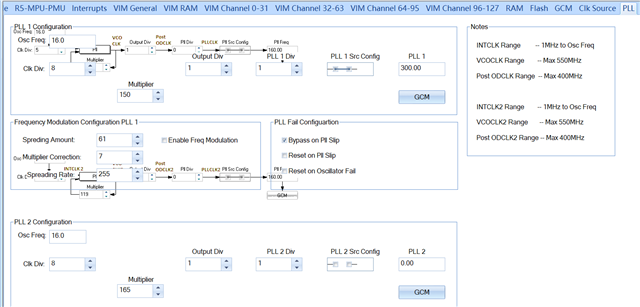
英文译本、我看到 PHY 芯片的 X1引脚的频率是50MHz、MDIO 引脚的频率是1MHz、用一个示波器。'