主题中讨论的其他器件: C2000WARE、 TMS320F280039C、 LAUNCHXL-F28069M、 BOOSTXL-DRV8301、 MOTORWARE
您好!
我尝试使用 SPI 接口读取绝对编码器值(AS5048A)。
由于我可以在 Github 上找到 AS5048A -C2000头文件、因此 我使用 它。
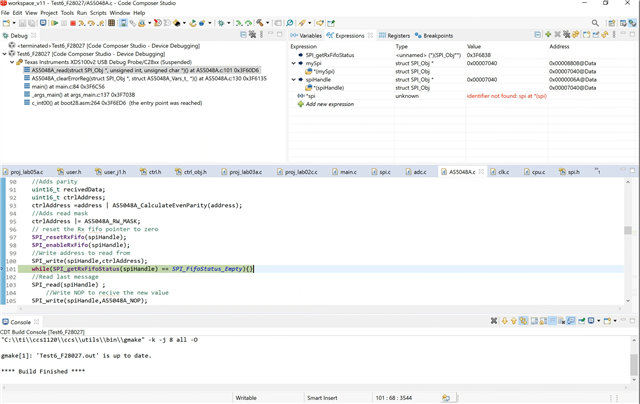
我发现代码 在下面的 while 循环中保持运行
AS5048A.c 文件中的" while (SPI_getRxFifoStatus (spiHandle)=SPI_FifoStatus_empty){"。
我使用了该社区上的其他不使用 AS5048A.h 文件的 SPI 代码 - Link、 代码仍会进入 while 循环、无法输出。
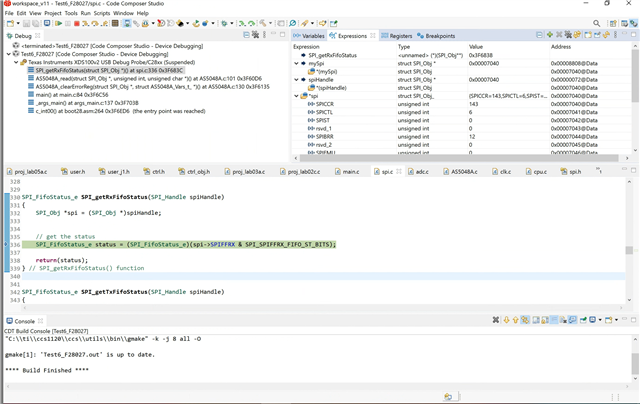
我认为这一点低于 SPI_getRxFifoStatus 函数中的点。
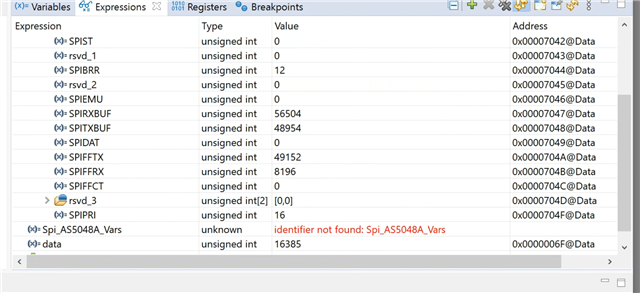
SPI_FifoStatus_e status =(SPI_FifoStatus_e)(SPI->SPIFFRx 和 SPI_SPIFFRX_FIFO_ST_BITS);<-在第二张图片中
SPI->SPIFFRX = 8196
SPI_SPIFFRX_FIFO_ST_BITS =(31<8)
请给我一些 建议来解决这个问题。
谢谢你。
这是 main.c 代码
//########################################################################################################################
//
//适用于 C2000的 AS5048A 库示例:LaunchXL-F28027F
//使用具有 FIFO 的 SPI 进行通信
//!
//########################################################################################################################
#include "DSP28x_Project.h"//器件头文件和示例 include 文件
#include "F2802x_common/include/adc.h"
#include "F2802x_common/include/clk.h"
#include "F2802x_common/include/flash.h"
#include "F2802x_common/include/gpio.h"
#include "F2802x_common/include/pie.h"
#include "F2802x_common/include/PLL.h"
#include "F2802x_common/include/SPI.h"
#include "F2802x_common/include/wdog.h"
#include "AS5048A.h"
clk_handle myClk;
Flash_handle myFlash;
GPIO_Handle myGpio;
PIE_Handle myPie;
SPI_Handle mySpi;
AS5048A_Vars_t gAs5048aVars;
void main (void)
{
cpu_handle myCpu;
pll_handle myPll;
WDOG_Handle myWDog;
//初始化此应用程序所需的所有句柄
myClk = CLK_init ((void *) CLK_base_ADDR、sizeof (CLK_Obj));
myCpu = cpu_init ((void *) NULL、sizeof (cpu_Obj));
myFlash = flash_init ((void *) flash_base_ADDR、sizeof (flash_Obj));
myGpio = GPIO_init ((void *) GPIO_base_ADDR、sizeof (GPIO_Obj));
myPie = PI_init ((void *) PIE_BASE_ADDR、sizeof (PIE_Obj));
myPll = PLL_init ((void *) PLL_base_ADDR、sizeof (PLL_Obj));
mySpi = SPI_init ((void *) SPIA_BASE_ADDR、sizeof (SPI_Obj));
myWdDog = WDOG_INIT ((void *) WDOG_BASE_ADDR、sizeof (WDOG_Obj));
//执行基本系统初始化
WDOG_DISABLE (myWDog);
CLK_enableAdcClock (myClk);
(*Device_cal)();
//选择内部振荡器1作为时钟源
CLK_setOscSrc (myClk、CLK_OscSrc_Internal);
//将 PLL 设置为 x10 /2、这将产生50MHz = 10MHz * 10/2
PLL_setup (myPll、PLL_Multiplier_10、PLL_DivideSelect_CLKIN_BY_2);
//禁用 PIE 和所有中断
PIE_DISABLE (myPie);
PI_DisableAllInts (myPie);
CPU_disableGlobalInts (myCpu);
CPU_clearIntFlags (myCpu);
//如果从闪存运行,则只将 RAM 复制到 RAM
#ifdef _flash
memcpy (&RamfuncsRunStart、&RamfuncsLoadStart、(size_t)&RamfuncsLoadSize);
#endif
AS5048A_GPIO_init (myGpio);//初始化 SPI GPIO
//设置调试矢量表并启用 PIE
// PI_setDebugIntVectorTable (myPie);
PIE_ENABLE (myPie);
AS5048A_SPI_init (mySpi、myClk);//初始化 SPI
AS5048A_fifo_init (mySpi);//初始化 SPI FIFO
for (;;){
//如果错误标志为高电平,则读取错误寄存器并清除该标志
if (gAs5048aVars.errorFlag){
AS5048A_clearErrorReg (mySpi、&gAs5048aVars);
DELAY_US (500);
}
否则{
//获取角度
AS5048A_getAngle (mySpi、&gAs5048aVars);
DELAY_US (500);
//获取幅度
AS5048A_getMagnitude (mySpi、&gAs5048aVars);
DELAY_US (500);
//读取诊断寄存器
AS5048A_readDiagnosteReg (mySpi、&gAs5048aVars);
DELAY_US (500);
//写入偏移寄存器。 扩展值= 15.50
AS5048A_writeZeroPosReg (mySpi、15.50);
DELAY_US (500);
//读取偏移寄存器。
AS5048A_readZeroPosReg (mySpi、&gAs5048aVars);
DELAY_US (500);
//读取编程寄存器
AS5048A_readProgrammingReg (mySpi、&gAs5048aVars);
DELAY_US (500);
}
}
}
//====================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
//不再需要。
//====================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================
这是 AS5048A.c 代码
#include
AS5048A_Obj as5048a;
//! \brief 设置 SPI 以便与 AS5048A 传感器通信
//! \param[IN] SPI_Handle、CLK_Handle
void AS5048A_SPI_init (SPI_Handle spiHandle、CLK_Handle clkHandle)
{
CLK_enableSpiaClock (clkHandle);
//复位打开、上升沿、16位字符位
SPI_setCharLength (spiHandle、SPI_CharLength _16_Bits);
//启用主控模式、正常相位、
SPI_setMode (spiHandle、SPI_Mode_Master);
SPI_enableTx (spiHandle);
SPI_setBaudRate (spiHandle、SPI_BAUDRAATE_1_MBaud);
SPI_setClkPhase (spiHandle、SPI_ClkPhase_Normal);
SPI_setClkPolarity (spiHandle、SPI_ClkPolarity_OutputRisingEdge_InputFallingEdge);
SPI_disableLoopBack (spiHandle);
SPI_ENABLE (spiHandle);
//设置断点以使断点不会干扰 xmission
SPI_setPriority (spiHandle、SPI_Priority_freeRun);//SPI_Priority_freeRun
}
//! \brief 设置 SPI FIFO 以与 AS5048A 传感器通信
//! \param[IN] SPI_Handle
void AS5048A_fifo_init (SPI_Handle spiHandle)
{
//初始化 SPI FIFO 寄存器
SPI_enableChannels (spiHandle);
SPI_enableFifoEnh (spiHandle);
SPI_resetTxFifo (spiHandle);
SPI_clearTxFifoInt (spiHandle);
SPI_resetRxFifo (spiHandle);
SPI_clearRxFifoInt (spiHandle);
SPI_setRxFifoIntLevel (spiHandle、SPI_FifoLevel_4_words);
}
//! \brief 设置 SPI GPIO 以与 AS5048A 传感器通信
//! param[IN] GPIO_Handle
void AS5048A_GPIO_init (GPIO_handle gpioHandle){
//初始化 GPIO
GPIO_setPullUp (gpioHandle、GPIO_Number_16、GPIO_PULLUP_Enable);
GPIO_setPullUp (gpioHandle、GPIO_Number_17、GPIO_PULLUP_Enable);
GPIO_setPullUp (gpioHandle、GPIO_Number_18、GPIO_PULLUP_Enable);
GPIO_setPullUp (gpioHandle、GPIO_Number_19、GPIO_PULLUP_Enable);
GPIO_setQualification (gpioHandle、GPIO_Number_16、GPIO_Qual_异 步);
GPIO_setQualification (gpioHandle、GPIO_Number_17、GPIO_Qual_Async);
GPIO_setQualification (gpioHandle、GPIO_Number_18、GPIO_Qual_Async);
GPIO_setQualification (gpioHandle、GPIO_Number_19、GPIO_Qual_异 步);
GPIO_setMode (gpioHandle、GPIO_Number_16、GPIO_16_Mode_SPISIMOA);
GPIO_setMode (gpioHandle、GPIO_Number_17、GPIO_17_Mode_SPISOMIA);
GPIO_setMode (gpioHandle、GPIO_Number_18、GPIO_18_Mode_SPICLKA);
GPIO_setMode (gpioHandle、GPIO_Number_19、GPIO_19_Mode_SPISTEA_not);
}
//! \brief 计算命令的偶校验
//! \param[in] uint16_t 值
uint16_t AS5048A_CalculateEvenParity (const uint16_t value){
uint16_t x =值;
x ^= x >> 8;
x ^= x >> 4;
x ^= x >> 2;
x ^= x >> 1;
返回((~x)& 1)<<15;
}
//! \brief 计算命令的奇数奇偶校验
//! \param[in] uint16_t 值
uint16_t AS5048A_CalculateOddParity (const uint16_t value){
uint16_t x =值;
x ^= x >> 8;
x ^= x >> 4;
x ^= x >> 2;
x ^= x >> 1;
返回((x)和1)<<15;
}
//! \brief 发送一个寄存器的读取命令,然后发送一个空命令来读取反馈
//! \param[in] spi_handle、(uint16_t)地址
uint16_t AS5048A_read (spi_handle spiHandle、const uint16_t address、bool *错误){
//添加奇偶校验
uint16_t recivedData;
uint16_t ctrlAddress;
ctrlAddress =地址| AS5048A_CalculateEvenParity (地址);
//添加读取掩码
ctrlAddress |= AS5048A_rw_mask;
//将 Rx FIFO 指针重置为零
SPI_resetRxFifo (spiHandle);
SPI_enableRxFifo (spiHandle);
//写入要读取的地址
SPI_WRITE (spiHandle、ctrlAddress);
while (SPI_getRxFifoStatus (spiHandle)=SPI_FifoStatus_empty){}
//阅读最后一条消息
spi_read (spiHandle);
//写入 NOP 以恢复新值
SPI_WRITE (spiHandle、AS5048A_NOP);
while (SPI_getRxFifoStatus (spiHandle)=SPI_FifoStatus_empty){}
//从寻址的寄存器中读取值
recivedData=SPI_Read (spiHandle);
if (recivedData & 0x4000){
*ERROR=1;
}
返回 RecivedData &~0xC000;
}
//! \brief 读取 AS5048A 上的编程寄存器
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_readProgrammingReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars){
uint16_t newData = AS5048A_read (spiHandle、AS5048A_programming_control、&SPI_AS5048A_Vars->errorFlag);
SPI_AS5048A_Vars->ProgrammingRegister.PRG_Enable =(bool)(newData &(uint16_t) AS5048A_programming_enable)?1:0;
SPI_AS5048A_Vars->ProgrammingRegister.PRG_burn =(bool)(newData &(uint16_t) AS5048A_programming_burn)?1:0;
SPI_AS5048A_Vars->ProgrammingRegister.PRG_verify =(bool)(newData &(uint16_t) AS5048A_programming_verify)?1:0;
}
//! \brief 读取错误寄存器并清除 AS5048A 上的错误标志
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_clearErrorReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars){
uint16_t newData = AS5048A_read (spiHandle、AS5048A_clear_error_flag、&SPI_AS5048A_Vars->errorFlag);
SPI_AS5048A_Vars->ErrorRegister.ERR_framingError =(bool)(newData &(uint16_t) AS5048A_error_frame)?1:0;
SPI_AS5048A_Vars->ErrorRegister.ERR_invalidCommand =(bool)(newData &(uint16_t) AS5048A_ERROR_INVALID_COMMAND)?1:0;
SPI_AS5048A_Vars->ErrorRegister.ERR_parityError =(bool)(newData &(uint16_t) AS5048A_error_parity)?1:0;
SPI_AS5048A_Vars->errorFlag=0;
}
//! \brief 从 AS5048A 读取诊断寄存器
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_readDiagnosteReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars){
uint16_t newData = AS5048A_read (spiHandle、AS5048A_DIAG_AGC、&SPI_AS5048A_Vars->errorFlag);
SPI_AS5048A_Vars->DiagnosteRegister.DIAG_AGC_AutomaticGain =(字符) newData&0xFF;
SPI_AS5048A_Vars->DiagnosteRegister.DIAG_AGC_ocf =(bool)(newData &(uint16_t) AS5048A_DIAG_AGC_OCF)?1:0;
SPI_AS5048A_Vars->DiagnosteRegister.DIAG_AGC_cof =(bool)(newData &(uint16_t) AS5048A_DIAG_AGC_COF)?1:0;
SPI_AS5048A_Vars->DiagnosteRegister.DIAG_AGC_Comp_Low =(bool)(newData &(uint16_t) AS5048A_DIAG_AGC_COMP_LOW)?1:0;
SPI_AS5048A_Vars->DiagnosteRegister.DIAG_AGC_Comp_High =(bool)(newData &(uint16_t) AS5048A_DIAG_AGC_COMP_HIGH)?1:0;
}
//! \brief 从 AS5048A 读取零位置
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_readZeroPosReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars){
uint16_t newDataHigh = AS5048A_read (spiHandle、0x0016、&SPI_AS5048A_Vars->errorFlag);
uint16_t newDataLow = AS5048A_read (spiHandle、0x0017、&SPI_AS5048A_Vars->errorFlag);
SPI_AS5048A_Vars->ZeroPosition .zero_POS_HI =(uint16_t) newDataHigh &(uint16_t) 0xFF;
SPI_AS5048A_Vars->ZeroPosition .zero_POS_LOW =(uint16_t) newDataLow &(uint16_t) 0x3F;
SPI_AS5048A_VARs->zeroAngle =(float)(uint16_t)(SPI_AS5048A_Vars->ZeroPosition .zero_POS_HI <6)|(uint16_t)(SPI_AS5048A_Vars->ZeroPosition.zero_low)/384.0;36384.0/Vars*s)
}
//! 将零点偏移位置\brief 写入 AS5048A
//! \param[IN] SPI_Handle、浮点数零角度(度数)
void AS5048A_writeZeroPosReg (SPI_Handle spiHandle、const float zeroAngle){
uint16_t 数据;
uint16_t 低电平;
uint16_t HIGH;
数据=((零角/360.0)* 16384.0);
低电平= 0x003F &数据;
HIGH =(0x3FC0 & DATA)>>6;
AS5048A_write (spiHandle、AS5048A_OTP_REGISTER_ZERO _POS_HIGH、HIGH);
AS5048A_write (spiHandle、AS5048A_OTP_register_zero_POS_low、low);
}
//! \brief 返回绝对(多转)旋转。 这使用 MCU 的计算
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_getAngle (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars){
float angle=AS5048A_read (spiHandle、AS5048A_angle、&SPI_AS5048A_Vars->errorFlag)*(360.0/16384.0);
float angleDiff =角度- SPI_AS5048A_Vars->angleLastCycle;
IF (angleDiff >200){
SPI_AS5048A_Vars->count--;
}
否则、如果(angleDiff <-200){
SPI_AS5048A_Vars->count++;
}
SPI_AS5048A_Vars->angleLastCycle =角度;
SPI_AS5048A_Vars->angleSingleturn =角度;
SPI_AS5048A_Vars->angleMultiTurn =SPI_AS5048A_Vars->count *360.0+SPI_AS5048A_Vars->angleSingleturn;
}
//! \brief 发送一个用于读取寄存器的读取命令并读取接收寄存器。(最后一个软件包)
//! \param[in] spi_handle、(uint16_t)地址
uint16_t AS5048A_stream (SPI_Handle spiHandle、uint16_t address){
//添加读取掩码
地址=地址| AS5048A_RW_MASK;
//添加奇偶校验
address |= AS5048A_CalculateEvenParity (address);
SPI_WRITE (spiHandle、address);
while (SPI_getRxFifoStatus (spiHandle)=SPI_FifoStatus_empty){}
返回 SPI_Read (spiHandle)&~0xC000;
}
//! \brief 直接从 AS5048A 返回幅度。
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_getMagnitude (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars){
SPI_AS5048A_Vars->Magnitude =AS5048A_Read (spiHandle、AS5048A_Magnitude、&SPI_AS5048A_Vars->errorFlag)/16384.0;
}
//! \brief 发送写入到寄存器地址,然后发送数据写入其中
//! \param[in] spi_handle、(uint16_t)地址、(uint16_t)数据
void AS5048A_write (spi_handle spiHandle、const uint16_t address、const uint16_t data){
uint16_t ctrlAddress;
uint16_t ctrlData;
uint16_t n;
//添加奇偶校验
ctrlAddress = address | AS5048A_CalculateOddParity (address);
ctrlData = data | AS5048A_CalculateOddParity (data);
//将 Rx FIFO 指针重置为零
SPI_resetRxFifo (spiHandle);
SPI_enableRxFifo (spiHandle);
SPI_WRITE (spiHandle、ctrlAddress);
//等待寄存器更新
对于(n=0;n<0xdf;n++)
asm (" NOP");
while (SPI_getRxFifoStatus (spiHandle)=SPI_FifoStatus_empty){}
//阅读最后一条消息
SPI_READ (spiHandle);
SPI_WRITE (spiHandle、ctrlData);
//等待寄存器更新
对于(n=0;n<0xdf;n++)
asm (" NOP");
while (SPI_getRxFifoStatus (spiHandle)=SPI_FifoStatus_empty){}
SPI_READ (spiHandle);
}
这是 AS5048A.h 代码
#ifndef _AS5048A_H_
#define _AS5048A_H_
秘书长的报告
//包括
#include
//驱动程序
//#include "sw/drivers/spi/src/32b/F28x/F2802x/spI.h"<-请勿使用
//#include "sw/drivers/gpio/src/32b/f28x/f2802x/gpio.h"<-请勿使用
#include "DSP28x_Project.h"//器件头文件和示例 include 文件
//#include "F2802x_common/include/spI.h"
#include "F2802x_common/include/gpio.h"
#include "F2802x_common/include/SPI.h"
#include "F2802x_common/include/clk.h"
#ifdef __cplusplus
extern "C"{
#endif
秘书长的报告
//定义
//! \brief 定义 R/W 掩码
//!
#define AS5048A_RW_MASK (1<<14)
//! \brief 定义“无操作”掩码
//!
#define AS5048A_NOP (0x00)
//! \brief 定义清除错误掩码
//!
#define AS5048A_CLEAR_ERROR_FLAG (0x0001)
//! \brief 定义编程控制掩码
//!
#define AS5048A_programming_control (0x0003)
//! \brief 定义零位置(高)掩码
//!
#define AS5048A_OTP_REGISTER_ZERO POS_HIGH (0x0016)
//! \brief 定义零位置(低)掩码
//!
#define AS5048A_OTP_REGISTER_ZERO _POS_LOW (0x0017)
//! \brief 定义诊断+自动增益控制(AGC)掩码
//!
#define AS5048A_DIAG_AGC (0x3FFD)
//! \brief 定义幅度控制掩码
//!
#define AS5048A_Magnitude (0x3FFE)
//! \brief 定义角度控制掩码
//!
#define AS5048A_ANGLE (0x3FFF)
//! \brief 定义错误寄存器中的组帧错误位
//!
#define AS5048A_ERROR_FRAME (1 << 0)
//! \brief 定义错误寄存器中的无效命令位
//!
#define AS5048A_ERROR_INVALID_COMMAND (1 << 1)
//! \brief 定义错误寄存器中的奇偶校验错误位
//!
#define AS5048A_ERROR_奇 偶校验(1 << 2)
//! \brief 定义编程寄存器中的 MODE 位
//!
#define AS5048A_programming_enable (1 << 0)
//! \brief 定义编程寄存器中保留的1位
//!
#define AS5048A_programming_RESV1 (1 << 1)
//! \brief 定义编程寄存器中保留的12位
//!
#define AS5048A_programming_RESV2 (1 << 2)
//! \brief 定义编程寄存器中的刻录位
//!
#define AS5048A_programming_burn (1 << 3)
//! \brief 定义编程寄存器中保留的3位
//!
#define AS5048A_programming_RESV3 (1 << 4)
//! \brief 定义编程寄存器中保留的4位
//!
#define AS5048A_programming_RESV4 (1 << 5)
//! \brief 定义编程寄存器中的校验位
//!
#define AS5048A_programming_verify (1 << 6)
//! \brief 定义诊断+自动增益控制寄存器中的 OCF 位
//!
#define AS5048A_DIAG_AGC_OCF (1 << 8)
//! \brief 定义诊断+自动增益控制寄存器中的 COF 位
//!
#define AS5048A_DIAG_AGC_COF (1 << 9)
//! \brief 定义诊断+自动增益控制寄存器中的 Comp Low 位
//!
#define AS5048A_DIAG_AGC_COMP_LOW (1 << 10)
//! \brief 定义诊断+自动增益控制寄存器中的 Comp High 位
//!
#define AS5048A_DIAG_AGC_COMP_HIGH (1 << 11)
//! \Error 寄存器的简要枚举。 所有错误均可通过访问清除
//!
typedef 枚举
{
ERR_framingError = AS5048A_ERROR_FRAME、//!<帧错误
ERR_INVALIDCommand = AS5048A_ERROR_INVALID_COMMAND、//!<命令无效
ERR_parityError = AS5048A_ERROR_奇 偶校验、//!<奇偶校验错误
} AS5048A_errorRegister_e;
//! \brief 编程寄存器的枚举。
//! 必须在烧断保险丝之前启用编程。 是一个
//! 必须进行验证。
//!
typedef 枚举
{
PRG_Enable = AS5048A_programming_enable、//!<启用编程
PRG_RSV1 = AS5048A_programming_RESV1、//!<保留
PRG_RSV2 = AS5048A_programming_RESV2、//!<保留
PRG_BURN = AS5048A_programming_burn、//!<刻录
PRG_RSV3 = AS5048A_programming_RESV3、//!<保留
PRG_RSV4 = AS5048A_programming_RESV4、//!<保留
PRG_VERIFY = AS5048A_programming_verify、//!<验证
} AS5048A_programmingRegister_e;
//! \볲 略 Diagnostics + AutomaticGain Control 寄存器的枚举。
//!
typedef 枚举
{
DIAG_AGC_OCV = AS5048A_DIAG_AGC_OCF、//!<偏移补偿完成
DIAG_AGC_COF = AS5048A_DIAG_AGC_COF、//!< CORDIC 溢出
DIAG_AGC_Comp_Low = AS5048A_DIAG_AGC_COMP_LOW、//!<表示高磁场。 建议在监测幅度值的同时进行监测。
DIAG_AGC_Comp_High = AS5048A_DIAG_AGC_COMP_HIGH、//!<表示磁场较弱。 建议监控幅度值。
} AS5048A_DIAG_AGcRegister_e;
//! 用于编程寄存器的\brief 对象
//!
typedef 结构_AS5048A_Error_
{
bool ERR_framingError;//位0
bool ERR_invalidCommand;//位1
bool ERR_parityError;//位2
}AS5048A_Error_;
//! 用于编程寄存器的\brief 对象
//!
typedef 结构_AS5048A_Programming_
{
bool PRG_Enable;//位0
bool PRG_RSV1;//位1
bool PRG_RSV2;//位2
bool PRG_BURN;//位3
bool PRG_RSV3;//位4
bool PRG_RSV4;//位5
bool PRG_VERIFY;//位6
}AS5048A_Programming_;
//! \brief 对象,用于诊断+自动增益控制(AGC)寄存器
//!
typedef 结构_AS5048A_Diag AGC_
{
CHAR DIAG_AGC_automaticGain;//位0-7
bool DIAG_AGC_ocf;//位8
bool DIAG_AGC_cof;//位9
bool DIAG_AGC_Comp_Low;//位10
bool DIAG_AGC_Comp_High;//位11
}AS5048A_Diag AGC_;
//! 针对 OTP 寄存器零位置低寄存器的\brief 对象
//!
typedef 结构_AS5048A_Zero_position_
{
uint16_t zero_POS_HI;//位7-0
uint16_t zero_POS_LOW;//位5-0
}AS5048A_Zero_Position_;
//! \brief 对象,用于 AS5048A 寄存器和命令
//!
typedef struct _AS5048A_Vars_t_
{
AS5048A_Error_ ErrorRegister;
AS5048A_Programming_ProgrammingRegister;
AS5048A_Zero_Position_ZeroPosition;
AS5048A_DIAG_AGC_诊断寄存器;
int16_t 计数;
浮点 angleLastCycle;
浮子 angleSingleturn;
浮动弯角多转;
浮点数幅度;
浮点零角;
bool errorFlag;
}AS5048A_Vars_t;
typedef 结构_AS5048A_Obj_
{
浮点 A;
}AS5048A_Obj;
//! \brief 定义 AS5048A 句柄
//!
typedef struct _AS5048A_Obj_* AS5048A_handle;
秘书长的报告
//函数
//! \brief 设置 SPI 以便与 AS5048A 传感器通信
//! \param[IN] SPI_Handle、CLK_Handle
void AS5048A_SPI_init (SPI_Handle spiHandle、CLK_Handle clkHandle);
//! \brief 设置 SPI FIFO 以与 AS5048A 传感器通信
//! \param[IN] SPI_Handle
void AS5048A_fifo_init (SPI_Handle spiHandle);
//! \brief 设置 SPI GPIO 以与 AS5048A 传感器通信
//! param[IN] GPIO_Handle
void AS5048A_GPIO_init (GPIO_handle gpioHandle);
//! \brief 计算命令的偶校验
//! \param[in] uint16_t 值
uint16_t AS5048A_CalculateEvenParity (const uint16_t value);
//! \brief 计算命令的奇数奇偶校验
//! \param[in] uint16_t 值
uint16_t AS5048A_CalculateOddParity (const uint16_t value);
//! \brief 发送一个寄存器的读取命令,然后发送一个空命令来读取反馈
//! \param[in] spi_handle、(uint16_t)地址
uint16_t AS5048A_read (SPI_Handle spiHandle、const uint16_t address、bool *错误);
//! \brief 读取 AS5048A 上的编程寄存器
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_readProgrammingReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars);
//! \brief 读取错误寄存器并清除 AS5048A 上的错误标志
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_clearErrorReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars);
//! \brief 从 AS5048A 读取诊断寄存器
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_readDiagnosteReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars);
//! \brief 从 AS5048A 读取零位置
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_readZeroPosReg (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars);
//! 将零点偏移位置\brief 写入 AS5048A
//! \param[IN] SPI_Handle、浮点数零角度(度数)
void AS5048A_writeZeroPosReg (SPI_Handle spiHandle、const float zeroAngle);
//! \brief 返回绝对(多转)旋转。 这使用 MCU 的计算
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_getAngle (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars);
//! \brief 发送一个用于读取寄存器的读取命令并读取接收寄存器。(最后一个软件包)
//! \param[in] spi_handle、(uint16_t)地址
uint16_t AS5048A_stream (SPI_Handle spiHandle、uint16_t address);
//! \brief 直接从 AS5048A 返回幅度。
//! \param[IN] SPI_Handle、AS5048A_Vars_t
void AS5048A_getMagnitude (SPI_Handle spiHandle、AS5048A_Vars_t * SPI_AS5048A_Vars);
//! \brief 发送写入到寄存器地址,然后发送数据写入其中
//! \param[in] spi_handle、(uint16_t)地址、(uint16_t)数据
void AS5048A_write (spi_handle spiHandle、const uint16_t address、const uint16_t data);
extern AS5048A_Obj as5048a;
#endif