请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F28069M 主题中讨论的其他器件:MOTORWARE
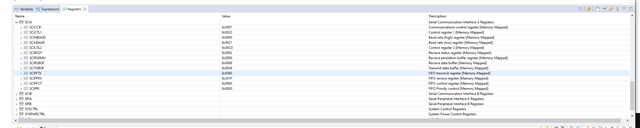
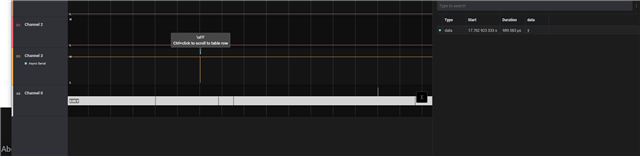
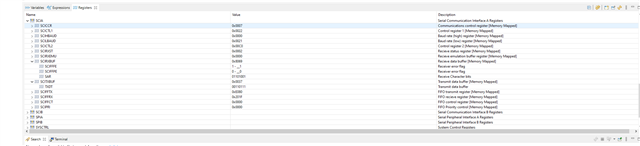
我从 SCI 回送的一个简单示例 example_2806xSci_Echoback.c 开始、能够修改代码、反复输出文本并通过我的逻辑分析仪进行查看。 现在、我正在尝试通过 instaspin lab10d 中的 sci.c 启用和使用 TX 和 Rx 引脚。 当我输入代码执行此操作时、我没有看到任何数据随逻辑分析仪发出。 本实验还会切换 LED。 因此、为了进行完整性检查、我尝试查看是否可以关闭其中一个 LED。 因此、在 proj_lab10d.c 中、我在第463行注释了代码、并将这一行代码和其他几行代码放在第230-232行、运气不佳。 灯一直亮着。 因此、我很难完成我要做的事情。 在 Example_2806xSci_Echoback 中 、gpio29引用了 j1.4引脚。 instaspin 实验 gpio.h 中的 GPIO_Number_29 是否引用同一个 j1.4引脚? 或者我可能没有在我的 sci 代码中启用某项功能。 我出了什么问题? 简单的切换功能调用为什么不会关闭灯? 但是、当它处于无限循环中时、它会打开和关闭它?
我在 proj_lab10d.c 中启用 sci 的代码来自第218-261行、然后我尝试在第439行发送数据。
proj_lab10d.c
/* --COPYRIGHT--,BSD
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file solutions/instaspin_foc/src/proj_lab10d.c
//! \brief Dual motor project
//!
//! (C) Copyright 2011, Texas Instruments, Inc.
//! \defgroup PROJ_LAB10d PROJ_LAB10d
//@{
//! \defgroup PROJ_LAB10d_OVERVIEW Project Overview
//!
//! Dual Motor Sensorless Velocity Control
//!
// **************************************************************************
// the includes
// system includes
#include <math.h>
#include "main_2motors.h"
#ifdef FLASH
#pragma CODE_SECTION(motor1_ISR,"ramfuncs");
#pragma CODE_SECTION(motor2_ISR,"ramfuncs");
#endif
// Include header files used in the main function
// **************************************************************************
// the defines
#define LED_BLINK_FREQ_Hz 5
#define EST_Number1 0
#define CTRL_Number1 0
//#define _ENABLE_OVM_
// **************************************************************************
// the globals
CTRL_Handle ctrlHandle[2];
uint_least16_t gCounter_updateGlobals[2] = {0, 0};
uint_least8_t motorNum = 0;
uint_least8_t estNumber[2] = {0, 1};
uint_least8_t ctrlNumber[2] = {0, 1};
bool Flag_Latch_softwareUpdate[2] = {true, true};
#ifdef CSM_ENABLE
#pragma DATA_SECTION(halHandle,"rom_accessed_data");
#endif
HAL_Handle halHandle;
#ifdef CSM_ENABLE
#pragma DATA_SECTION(gUserParams,"rom_accessed_data");
#endif
USER_Params gUserParams[2];
// the pwm voltage values for the three phases.
HAL_PwmData_t gPwmData[2] = {{_IQ(0.0), _IQ(0.0), _IQ(0.0)}, {_IQ(0.0), _IQ(0.0), _IQ(0.0)}};
// the voltage and current adc values for the CTRL controller and the FAST estimator.
HAL_AdcData_t gAdcData[2];
// the PWMDAC variable
HAL_DacData_t gDacData;
_iq gMaxCurrentSlope[2] = {_IQ(0.0), _IQ(0.0)};
#ifdef FAST_ROM_V1p6
CTRL_Obj *controller_obj[2];
#else
#ifdef CSM_ENABLE
#pragma DATA_SECTION(ctrl,"rom_accessed_data");
#endif
CTRL_Obj ctrl[2]; //v1p7 format
#endif
uint16_t gLEDcnt[2] = {0, 0};
// the variables to turn on and adjust InstaSPIN
volatile MOTOR_Vars_t gMotorVars[2] = {MOTOR_Vars_INIT_Mtr1,MOTOR_Vars_INIT_Mtr2};
//
volatile SYSTEM_Vars_t gSystemVars = SYSTEM_Vars_INIT;
#ifdef FLASH
// Used for running BackGround in flash, and ISR in RAM
extern uint16_t *RamfuncsLoadStart, *RamfuncsLoadEnd, *RamfuncsRunStart;
#ifdef CSM_ENABLE
extern uint16_t *econst_start, *econst_end, *econst_ram_load;
extern uint16_t *switch_start, *switch_end, *switch_ram_load;
#endif
#endif
SVGENCURRENT_Obj svgencurrent[2];
SVGENCURRENT_Handle svgencurrentHandle[2];
// set the offset, default value of 1 microsecond
int16_t gCmpOffset[2] = {(int16_t)(1.0 * USER_SYSTEM_FREQ_MHz_M1), (int16_t)(1.0 * USER_SYSTEM_FREQ_MHz_M2)};
MATH_vec3 gIavg[2] = {{_IQ(0.0), _IQ(0.0), _IQ(0.0)}, {_IQ(0.0), _IQ(0.0), _IQ(0.0)}};
uint16_t gIavg_shift[2] = {1, 1};
MATH_vec3 gPwmData_prev[2] = {{_IQ(0.0), _IQ(0.0), _IQ(0.0)}, {_IQ(0.0), _IQ(0.0), _IQ(0.0)}};
#ifdef DRV8301_SPI
// Watch window interface to the 8301 SPI
DRV_SPI_8301_Vars_t gDrvSpi8301Vars[2];
#endif
#ifdef DRV8305_SPI
// Watch window interface to the 8305 SPI
DRV_SPI_8305_Vars_t gDrvSpi8305Vars[2];
#endif
_iq gFlux_pu_to_Wb_sf[2];
_iq gFlux_pu_to_VpHz_sf[2];
_iq gTorque_Ls_Id_Iq_pu_to_Nm_sf[2];
_iq gTorque_Flux_Iq_pu_to_Nm_sf[2];
HAL_Handle halHandle; //!< the handle for the hardware abstraction
//!< layer for common CPU setup
HAL_Obj hal; //!< the hardware abstraction layer object
#ifdef F2802xF
#pragma DATA_SECTION(halHandleMtr,"rom_accessed_data");
#endif
HAL_Handle_mtr halHandleMtr[2]; //!< the handle for the hardware abstraction
//!< layer specific to the motor board.
HAL_Obj_mtr halMtr[2]; //!< the hardware abstraction layer object
//!< specific to the motor board.
// define Flying Start (FS) variables
FS_Obj fs[2];
FS_Handle fsHandle[2];
// define cpu_time object and handle for CPU usage time calculation
CPU_TIME_Handle cpu_timeHandle[2];
CPU_TIME_Obj cpu_time[2];
// **************************************************************************
// the functions
float motorSpeed = 0.2;
void main(void)
{
// Only used if running from FLASH
// Note that the variable FLASH is defined by the project
#ifdef FLASH
// Copy time critical code and Flash setup code to RAM
// The RamfuncsLoadStart, RamfuncsLoadEnd, and RamfuncsRunStart
// symbols are created by the linker. Refer to the linker files.
memCopy((uint16_t *)&RamfuncsLoadStart,(uint16_t *)&RamfuncsLoadEnd,(uint16_t *)&RamfuncsRunStart);
#ifdef CSM_ENABLE
//copy .econst to unsecure RAM
if(*econst_end - *econst_start)
{
memCopy((uint16_t *)&econst_start,(uint16_t *)&econst_end,(uint16_t *)&econst_ram_load);
}
//copy .switch ot unsecure RAM
if(*switch_end - *switch_start)
{
memCopy((uint16_t *)&switch_start,(uint16_t *)&switch_end,(uint16_t *)&switch_ram_load);
}
#endif
#endif
// initialize the hardware abstraction layer
halHandle = HAL_init(&hal,sizeof(hal));
/*
* TESTING GPIO FOR UART OF GPIO28 AND GPIO29
*/
HAL_Obj *obj = (HAL_Obj *)halHandle;
// Set pullups
GPIO_setPullup(obj->gpioHandle, GPIO_Number_28, GPIO_Pullup_Enable);
GPIO_setPullup(obj->gpioHandle, GPIO_Number_29, GPIO_Pullup_Enable);
// Set gpio 28 as async input and as SCIRXDA
GPIO_setQualification(obj->gpioHandle, GPIO_Number_28, GPIO_Qual_ASync);
GPIO_setMode(obj->gpioHandle, GPIO_Number_28, GPIO_28_Mode_SCIRXDA);
// Set gpio 29 as SCITXDA
GPIO_setMode(obj->gpioHandle, GPIO_Number_29, GPIO_29_Mode_SCITXDA);
// GPIO_setLow(obj->gpioHandle, (GPIO_Number_e)HAL_Gpio_LED2)
// GPIO_toggle(obj->gpioHandle, (GPIO_Number_e)HAL_Gpio_LED2);
// HAL_toggleLed(halHandle,(GPIO_Number_e)HAL_Gpio_LED2);
// Enable fifo
SCI_enableRxFifo(obj->sciHandle);
SCI_enableTxFifo(obj->sciHandle);
/*
* 1 stop bit, No loopback, No parity,8 char bits, async mode,
* idle-line protocol
*/
SCI_setNumStopBits(obj->sciHandle, SCI_NumStopBits_One);
SCI_disableParity(obj->sciHandle);
SCI_setCharLength(obj->sciHandle, SCI_CharLength_8_Bits);
SCI_setMode(obj->sciHandle, SCI_Mode_IdleLine);
/*
* enable TX, RX, internal SCICLK, Disable RX ERR, SLEEP, TXWAKE
*/
SCI_enableTx(obj->sciHandle);
SCI_enableRx(obj->sciHandle);
SCI_disableRxErrorInt(obj->sciHandle);
SCI_disableSleep(obj->sciHandle);
SCI_disableTxWake(obj->sciHandle);
// Set baud
SCI_setBaudRate(obj->sciHandle, SCI_BaudRate_57_6_kBaud);
/*
* -------------------------------------------
*/
// initialize the individual motor hal files
halHandleMtr[HAL_MTR1] = HAL_init_mtr(&halMtr[HAL_MTR1], sizeof(halMtr[HAL_MTR1]), (HAL_MtrSelect_e)HAL_MTR1);
// initialize the individual motor hal files
halHandleMtr[HAL_MTR2] = HAL_init_mtr(&halMtr[HAL_MTR2], sizeof(halMtr[HAL_MTR2]), (HAL_MtrSelect_e)HAL_MTR2);
// initialize the controller
#ifdef FAST_ROM_V1p6
// ctrlHandle[HAL_MTR1] = CTRL_initCtrl(CTRL_Number1, EST_Number1); //v1p6 format (06xF and 06xM devices)
ctrlHandle[HAL_MTR1] = CTRL_initCtrl(ctrlNumber[HAL_MTR1], estNumber[HAL_MTR1]); //v1p6 format (06xF and 06xM devices)
ctrlHandle[HAL_MTR2] = CTRL_initCtrl(ctrlNumber[HAL_MTR2], estNumber[HAL_MTR2]); //v1p6 format (06xF and 06xM devices)
#else
ctrlHandle[HAL_MTR1] = CTRL_initCtrl(estNumber[HAL_MTR1], &ctrl[HAL_MTR1], sizeof(ctrl[HAL_MTR1])); //v1p7 format default
ctrlHandle[HAL_MTR2] = CTRL_initCtrl(estNumber[HAL_MTR2], &ctrl[HAL_MTR2], sizeof(ctrl[HAL_MTR2])); //v1p7 format default
#endif
// Initialize and setup the 100% SVM generator
svgencurrentHandle[HAL_MTR1] = SVGENCURRENT_init(&svgencurrent[HAL_MTR1],sizeof(svgencurrent[HAL_MTR1]));
// Initialize and setup the 100% SVM generator
svgencurrentHandle[HAL_MTR2] = SVGENCURRENT_init(&svgencurrent[HAL_MTR2],sizeof(svgencurrent[HAL_MTR2]));
// initialize the user parameters
// This function initializes all values of structure gUserParams with
// values defined in user.h. The values in gUserParams will be then used by
// the hardware abstraction layer (HAL) to configure peripherals such as
// PWM, ADC, interrupts, etc.
USER_setParamsMtr1(&gUserParams[HAL_MTR1]);
USER_setParamsMtr2(&gUserParams[HAL_MTR2]);
//HAL_setParams
// set the common hardware abstraction layer parameters
HAL_setParams(halHandle,&gUserParams[HAL_MTR1]);
#ifdef _SINGLE_ISR_EN_
// Setup each motor board to its specific setting
HAL_setParamsDualMtr(halHandleMtr[HAL_MTR1], halHandleMtr[HAL_MTR2], halHandle, &gUserParams[HAL_MTR1], &gUserParams[HAL_MTR2]);
#else
// Setup each motor board to its specific setting
HAL_setParamsMtr(halHandleMtr[HAL_MTR1],halHandle, &gUserParams[HAL_MTR1]);
// Setup each motor board to its specific setting
HAL_setParamsMtr(halHandleMtr[HAL_MTR2],halHandle, &gUserParams[HAL_MTR2]);
#endif
//TURN ON GLOBAL SYSTEM AND M
gSystemVars.Flag_enableSystem = 1;
gMotorVars[HAL_MTR1].Flag_Run_Identify = 1;
gMotorVars[HAL_MTR1].Flag_enableUserParams = true;
gMotorVars[HAL_MTR2].Flag_enableUserParams = true;
gMotorVars[HAL_MTR1].Flag_enableSpeedCtrl = true;
gMotorVars[HAL_MTR2].Flag_enableSpeedCtrl = true;
for(motorNum=HAL_MTR1;motorNum<=HAL_MTR2;motorNum++)
{
// set the default controller parameters
CTRL_setParams(ctrlHandle[motorNum], &gUserParams[motorNum]);
// set the default controller parameters (Reset the control to re-identify the motor)
CTRL_setParams(ctrlHandle[motorNum],&gUserParams[motorNum]);
{
// initialize the CPU usage module
cpu_timeHandle[motorNum] = CPU_TIME_init(&cpu_time[motorNum],sizeof(cpu_time[motorNum]));
CPU_TIME_setParams(cpu_timeHandle[motorNum], PWM_getPeriod(halHandleMtr[motorNum]->pwmHandle[0]));
}
// set overmodulation to maximum value
gMotorVars[motorNum].OverModulation = _IQ(MATH_TWO_OVER_THREE);
// setup faults
HAL_setupFaults(halHandleMtr[motorNum]);
// enable DC bus compensation
CTRL_setFlag_enableDcBusComp(ctrlHandle[motorNum], true);
// compute scaling factors for flux and torque calculations
gFlux_pu_to_Wb_sf[motorNum] = USER_computeFlux_pu_to_Wb_sf(&gUserParams[motorNum]);
gFlux_pu_to_VpHz_sf[motorNum] = USER_computeFlux_pu_to_VpHz_sf(&gUserParams[motorNum]);
gTorque_Ls_Id_Iq_pu_to_Nm_sf[motorNum] = USER_computeTorque_Ls_Id_Iq_pu_to_Nm_sf(&gUserParams[motorNum]);
gTorque_Flux_Iq_pu_to_Nm_sf[motorNum] = USER_computeTorque_Flux_Iq_pu_to_Nm_sf(&gUserParams[motorNum]);
gMotorVars[motorNum].current_pu_to_A_sf = _IQ(gUserParams[motorNum].iqFullScaleCurrent_A);
gMotorVars[motorNum].voltage_pu_to_kv_sf = _IQ(gUserParams[motorNum].iqFullScaleVoltage_V/(float_t)1000.0);
gMotorVars[motorNum].current_A_to_pu_sf = _IQdiv(_IQ(1.0), gMotorVars[motorNum].current_pu_to_A_sf);
#ifdef DRV8301_SPI
// turn on the DRV8301 if present
HAL_enableDrv(halHandleMtr[motorNum]);
// initialize the DRV8301 interface
HAL_setupDrvSpi(halHandleMtr[motorNum],&gDrvSpi8301Vars[motorNum]);
#endif
#ifdef DRV8305_SPI
// turn on the DRV8305 if present
HAL_enableDrv(halHandleMtr[motorNum]);
// initialize the DRV8305 interface
HAL_setupDrvSpi(halHandleMtr[motorNum],&gDrvSpi8305Vars[motorNum]);
#endif
gCounter_updateGlobals[motorNum] = 0;
}
// setup svgen current for Motor #1
{
float_t minWidth_microseconds_M1 = 2.0;
uint16_t minWidth_counts = (uint16_t)(minWidth_microseconds_M1 * USER_SYSTEM_FREQ_MHz);
float_t fdutyLimit = 0.5-(2.0*minWidth_microseconds_M1*USER_PWM_FREQ_kHz_M1*0.001);
_iq dutyLimit = _IQ(fdutyLimit);
SVGENCURRENT_setMinWidth(svgencurrentHandle[HAL_MTR1], minWidth_counts);
SVGENCURRENT_setIgnoreShunt(svgencurrentHandle[HAL_MTR1], use_all);
SVGENCURRENT_setMode(svgencurrentHandle[HAL_MTR1],all_phase_measurable);
SVGENCURRENT_setVlimit(svgencurrentHandle[HAL_MTR1],dutyLimit);
}
// setup svgen current for Motor #2
{
float_t minWidth_microseconds_M2 = 2.0;
uint16_t minWidth_counts = (uint16_t)(minWidth_microseconds_M2 * USER_SYSTEM_FREQ_MHz);
float_t fdutyLimit = 0.5-(2.0*minWidth_microseconds_M2*USER_PWM_FREQ_kHz_M2*0.001);
_iq dutyLimit = _IQ(fdutyLimit);
SVGENCURRENT_setMinWidth(svgencurrentHandle[HAL_MTR2], minWidth_counts);
SVGENCURRENT_setIgnoreShunt(svgencurrentHandle[HAL_MTR2], use_all);
SVGENCURRENT_setMode(svgencurrentHandle[HAL_MTR2],all_phase_measurable);
SVGENCURRENT_setVlimit(svgencurrentHandle[HAL_MTR2],dutyLimit);
}
{
CTRL_Version version;
// get the version number
CTRL_getVersion(ctrlHandle[HAL_MTR1],&version);
gMotorVars[HAL_MTR1].CtrlVersion = version;
gMotorVars[HAL_MTR2].CtrlVersion = version;
}
// set DAC parameters
HAL_setDacParameters(halHandle, &gDacData);
// initialize the interrupt vector table
HAL_initIntVectorTable(halHandle);
// enable the ADC interrupts
HAL_enableAdcInts(halHandle);
// enable global interrupts
HAL_enableGlobalInts(halHandle);
// enable debug interrupts
HAL_enableDebugInt(halHandle);
// disable the PWM
HAL_disablePwm(halHandleMtr[HAL_MTR1]);
HAL_disablePwm(halHandleMtr[HAL_MTR2]);
// Below two lines code for Flash Testing, need to be commented
// gSystemVars.Flag_enableSynControl = true;
// gSystemVars.Flag_enableRun = true;
for(;;)
{
/*
* ADDED CODE TO SEND DATA
*/
SCI_putDataNonBlocking(obj->sciHandle, 72);
/*
* -------------------------
*/
// Waiting for enable system flag to be set
// Motor 1 Flag_enableSys is the master control.
// while(!(gMotorVars[HAL_MTR1].Flag_enableSys));
while(!(gSystemVars.Flag_enableSystem));
// Enable the Library internal PI. Iq is referenced by the speed PI now
// CTRL_setFlag_enableSpeedCtrl(ctrlHandle[HAL_MTR1], true);
// Enable the Library internal PI. Iq is referenced by the speed PI now
// CTRL_setFlag_enableSpeedCtrl(ctrlHandle[HAL_MTR2], true);
// loop while the enable system flag is true
// Motor 1 Flag_enableSys is the master control.
// while(gMotorVars[HAL_MTR1].Flag_enableSys)
while(gSystemVars.Flag_enableSystem)
{
// toggle status LED
if(gLEDcnt[HAL_MTR1]++ > (uint_least32_t)(USER_ISR_FREQ_Hz_M1 / LED_BLINK_FREQ_Hz))
{
// HAL_toggleLed(halHandle,(GPIO_Number_e)HAL_Gpio_LED2);
gLEDcnt[HAL_MTR1] = 0;
}
// toggle status LED
if(gLEDcnt[HAL_MTR2]++ > (uint_least32_t)(USER_ISR_FREQ_Hz_M2 / LED_BLINK_FREQ_Hz))
{
HAL_toggleLed(halHandle,(GPIO_Number_e)HAL_Gpio_LED3);
gLEDcnt[HAL_MTR2] = 0;
}
// if(gSystemVars.Flag_enableSynControl == true)
// {
gMotorVars[HAL_MTR1].Flag_Run_Identify = 1;
// gMotorVars[HAL_MTR1].SpeedRef_krpm = gSystemVars.SpeedSet_krpm;
gMotorVars[HAL_MTR1].SpeedRef_krpm = _IQ(motorSpeed);
gMotorVars[HAL_MTR1].MaxAccel_krpmps = _IQ(0.8);
gMotorVars[HAL_MTR2].Flag_Run_Identify = gSystemVars.Flag_enableRun;
gMotorVars[HAL_MTR2].SpeedRef_krpm = gSystemVars.SpeedSet_krpm;
gMotorVars[HAL_MTR2].MaxAccel_krpmps = gSystemVars.MaxAccelSet_krpmps;
// }
for(motorNum=HAL_MTR1;motorNum<=HAL_MTR2;motorNum++)
{
CTRL_Obj *obj = (CTRL_Obj *)ctrlHandle[motorNum];
// increment counters
gCounter_updateGlobals[motorNum]++;
if(CTRL_isError(ctrlHandle[motorNum]))
{
// set the enable controller flag to false
CTRL_setFlag_enableCtrl(ctrlHandle[motorNum],false);
// set the enable system flag to false
gMotorVars[motorNum].Flag_enableSys = false;
// disable the PWM
HAL_disablePwm(halHandleMtr[motorNum]);
}
else
{
// update the controller state
bool flag_ctrlStateChanged = CTRL_updateState(ctrlHandle[motorNum]);
// enable or disable the control
CTRL_setFlag_enableCtrl(ctrlHandle[motorNum], gMotorVars[motorNum].Flag_Run_Identify);
if(flag_ctrlStateChanged)
{
CTRL_State_e ctrlState = CTRL_getState(ctrlHandle[motorNum]);
EST_State_e estState = EST_getState(obj->estHandle);
if(ctrlState == CTRL_State_OffLine)
{
// enable the PWM
HAL_enablePwm(halHandleMtr[motorNum]);
}
else if(ctrlState == CTRL_State_OnLine)
{
// if(gMotorVars[motorNum].Flag_enableOffsetcalc == true)
// {
// // update the ADC bias values
// HAL_updateAdcBias(halHandleMtr[motorNum]);
// }
// else
// {
// // set the current bias
// HAL_setBias(halHandleMtr[motorNum],HAL_SensorType_Current,0,_IQ(I_A_offset));
// HAL_setBias(halHandleMtr[motorNum],HAL_SensorType_Current,1,_IQ(I_B_offset));
// HAL_setBias(halHandleMtr[motorNum],HAL_SensorType_Current,2,_IQ(I_C_offset));
//
// // set the voltage bias
// HAL_setBias(halHandleMtr[motorNum],HAL_SensorType_Voltage,0,_IQ(V_A_offset));
// HAL_setBias(halHandleMtr[motorNum],HAL_SensorType_Voltage,1,_IQ(V_B_offset));
// HAL_setBias(halHandleMtr[motorNum],HAL_SensorType_Voltage,2,_IQ(V_C_offset));
// }
if((estState < EST_State_LockRotor) || (estState > EST_State_MotorIdentified))
{
// update the ADC bias values
HAL_updateAdcBias(halHandleMtr[motorNum]);
}
// Return the bias value for currents
gMotorVars[motorNum].I_bias.value[0] = HAL_getBias(halHandleMtr[motorNum],HAL_SensorType_Current,0);
gMotorVars[motorNum].I_bias.value[1] = HAL_getBias(halHandleMtr[motorNum],HAL_SensorType_Current,1);
gMotorVars[motorNum].I_bias.value[2] = HAL_getBias(halHandleMtr[motorNum],HAL_SensorType_Current,2);
// Return the bias value for voltages
gMotorVars[motorNum].V_bias.value[0] = HAL_getBias(halHandleMtr[motorNum],HAL_SensorType_Voltage,0);
gMotorVars[motorNum].V_bias.value[1] = HAL_getBias(halHandleMtr[motorNum],HAL_SensorType_Voltage,1);
gMotorVars[motorNum].V_bias.value[2] = HAL_getBias(halHandleMtr[motorNum],HAL_SensorType_Voltage,2);
// enable the PWM
HAL_enablePwm(halHandleMtr[motorNum]);
}
else if(ctrlState == CTRL_State_Idle)
{
// disable the PWM
HAL_disablePwm(halHandleMtr[motorNum]);
gMotorVars[motorNum].Flag_Run_Identify = false;
} // ctrlState=?
if((CTRL_getFlag_enableUserMotorParams(ctrlHandle[motorNum]) == true) &&
(ctrlState > CTRL_State_Idle) &&
(gMotorVars[motorNum].CtrlVersion.minor == 6))
{
// call this function to fix 1p6
USER_softwareUpdate1p6(ctrlHandle[motorNum], &gUserParams[motorNum]);
}
} // flag_ctrlStateChanged=?
} // CTRL_isError=?
if(EST_isMotorIdentified(obj->estHandle))
{
_iq Id_squared_pu = _IQmpy(CTRL_getId_ref_pu(ctrlHandle[motorNum]),CTRL_getId_ref_pu(ctrlHandle[motorNum]));
//Set the maximum current controller output for the Iq and Id current controllers to enable
//over-modulation.
//An input into the SVM above 1/SQRT(3) = 0.5774 is in the over-modulation region. An input of 0.5774 is where
//the crest of the sinewave touches the 100% duty cycle. At an input of 2/3, the SVM generator
//produces a trapezoidal waveform touching every corner of the hexagon
CTRL_setMaxVsMag_pu(ctrlHandle[motorNum],gMotorVars[motorNum].OverModulation);
// set the current ramp
EST_setMaxCurrentSlope_pu(obj->estHandle,gMaxCurrentSlope[motorNum]);
gMotorVars[motorNum].Flag_MotorIdentified = true;
// set the speed reference
CTRL_setSpd_ref_krpm(ctrlHandle[motorNum],gMotorVars[motorNum].SpeedRef_krpm);
// set the speed acceleration
// CTRL_setMaxAccel_pu(ctrlHandle[motorNum],_IQmpy(MAX_ACCEL_KRPMPS_SF_M1,gMotorVars[motorNum].MaxAccel_krpmps));
CTRL_setMaxAccel_pu(ctrlHandle[motorNum],_IQmpy(MAX_ACCEL_KRPMPS_SF_M1,gMotorVars[motorNum].MaxAccel_krpmps));
// set the Id reference
// CTRL_setId_ref_pu(ctrlHandle[motorNum], _IQmpy(gMotorVars.IdRef_A, _IQ(1.0/USER_IQ_FULL_SCALE_CURRENT_A)));
CTRL_setId_ref_pu(ctrlHandle[motorNum], _IQmpy(gMotorVars[motorNum].IdRef_A, gMotorVars[motorNum].current_A_to_pu_sf));
if(Flag_Latch_softwareUpdate[motorNum])
{
Flag_Latch_softwareUpdate[motorNum] = false;
USER_calcPIgains(ctrlHandle[motorNum], &gUserParams[motorNum]);
// initialize the watch window kp and ki current values with pre-calculated values
gMotorVars[motorNum].Kp_Idq = CTRL_getKp(ctrlHandle[motorNum],CTRL_Type_PID_Id);
gMotorVars[motorNum].Ki_Idq = CTRL_getKi(ctrlHandle[motorNum],CTRL_Type_PID_Id);
// initialize the watch window kp and ki current values with pre-calculated values
gMotorVars[motorNum].Kp_spd = CTRL_getKp(ctrlHandle[motorNum],CTRL_Type_PID_spd);
gMotorVars[motorNum].Ki_spd = CTRL_getKi(ctrlHandle[motorNum],CTRL_Type_PID_spd);
}
}
else
{
Flag_Latch_softwareUpdate[motorNum] = true;
// initialize the watch window kp and ki values with pre-calculated values
// gMotorVars[motorNum].Kp_spd = CTRL_getKp(ctrlHandle[motorNum],CTRL_Type_PID_spd);
// gMotorVars[motorNum].Ki_spd = CTRL_getKi(ctrlHandle[motorNum],CTRL_Type_PID_spd);
// the estimator sets the maximum current slope during identification
gMaxCurrentSlope[motorNum] = EST_getMaxCurrentSlope_pu(obj->estHandle);
}
// when appropriate, update the global variables
if(gCounter_updateGlobals[motorNum] >= NUM_MAIN_TICKS_FOR_GLOBAL_VARIABLE_UPDATE)
{
// reset the counter
gCounter_updateGlobals[motorNum] = 0;
updateGlobalVariables_motor(ctrlHandle[motorNum], motorNum);
}
// recalculate Kp and Ki gains to fix the R/L limitation of 2000.0, and Kp limit to 0.11
recalcKpKi(ctrlHandle[motorNum], motorNum);
// update Kp and Ki gains
updateKpKiGains(ctrlHandle[motorNum], motorNum);
// enable/disable the forced angle
EST_setFlag_enableForceAngle(obj->estHandle,gMotorVars[motorNum].Flag_enableForceAngle);
// enable or disable power warp
CTRL_setFlag_enablePowerWarp(ctrlHandle[motorNum],gMotorVars[motorNum].Flag_enablePowerWarp);
#ifdef DRV8301_SPI
HAL_writeDrvData(halHandleMtr[motorNum],&gDrvSpi8301Vars[motorNum]);
HAL_readDrvData(halHandleMtr[motorNum],&gDrvSpi8301Vars[motorNum]);
#endif
#ifdef DRV8305_SPI
HAL_writeDrvData(halHandleMtr[motorNum],&gDrvSpi8305Vars[motorNum]);
HAL_readDrvData(halHandleMtr[motorNum],&gDrvSpi8305Vars[motorNum]);
#endif
}
} // end of while(gFlag_enableSys) loop
// disable the PWM
HAL_disablePwm(halHandleMtr[HAL_MTR1]);
HAL_disablePwm(halHandleMtr[HAL_MTR2]);
gMotorVars[HAL_MTR1].Flag_Run_Identify = false;
gMotorVars[HAL_MTR2].Flag_Run_Identify = false;
// set the default controller parameters (Reset the control to re-identify the motor)
CTRL_setParams(ctrlHandle[HAL_MTR1],&gUserParams[HAL_MTR1]);
CTRL_setParams(ctrlHandle[HAL_MTR2],&gUserParams[HAL_MTR2]);
} // end of for(;;) loop
} // end of main() function
// ADDED FUNCTION TO SEND DATA
void scia_msg(SCI_Handle sciHandle, char * msg)
{
// uint16_t i;
// i = 0;
// while(msg[i] != '\0')
// {
// strtoul()
// SCI_putDataNonBlocking(obj->sciHandle, msg[i]);
// i++;
// }
}
#ifdef _SINGLE_ISR_EN_
// motor_ISR
interrupt void motor_ISR(void)
{
// read the timer 1 value and update the CPU usage module
uint32_t timer1Cnt = HAL_readTimerCnt(halHandle,2);
CPU_TIME_updateCnts(cpu_timeHandle[HAL_MTR1],timer1Cnt);
#ifdef _ENABLE_OVM_
SVGENCURRENT_MeasureShunt_e measurableShuntThisCycle_M1 = SVGENCURRENT_getMode(svgencurrentHandle[HAL_MTR1]);
#endif
// acknowledge the ADC interrupt
HAL_acqAdcInt(halHandle,ADC_IntNumber_1);
// convert the ADC data
HAL_readAdcData(halHandle,halHandleMtr[HAL_MTR1],&gAdcData[HAL_MTR1]);
#ifdef _ENABLE_OVM_
// run the current reconstruction algorithm
SVGENCURRENT_RunRegenCurrent(svgencurrentHandle[HAL_MTR1], (MATH_vec3 *)(gAdcData[HAL_MTR1].I.value));
gIavg[HAL_MTR1].value[0] += (gAdcData[HAL_MTR1].I.value[0] - gIavg[HAL_MTR1].value[0])>>gIavg_shift[HAL_MTR1];
gIavg[HAL_MTR1].value[1] += (gAdcData[HAL_MTR1].I.value[1] - gIavg[HAL_MTR1].value[1])>>gIavg_shift[HAL_MTR1];
gIavg[HAL_MTR1].value[2] += (gAdcData[HAL_MTR1].I.value[2] - gIavg[HAL_MTR1].value[2])>>gIavg_shift[HAL_MTR1];
if(measurableShuntThisCycle_M1 > two_phase_measurable)
{
gAdcData[HAL_MTR1].I.value[0] = gIavg[HAL_MTR1].value[0];
gAdcData[HAL_MTR1].I.value[1] = gIavg[HAL_MTR1].value[1];
gAdcData[HAL_MTR1].I.value[2] = gIavg[HAL_MTR1].value[2];
}
#endif
// run the flying start
//FS_run(ctrlHandle[HAL_MTR1], fsHandle[HAL_MTR1]);
// run the controller
CTRL_run(ctrlHandle[HAL_MTR1],halHandleMtr[HAL_MTR1],&gAdcData[HAL_MTR1],&gPwmData[HAL_MTR1]);
#ifdef _ENABLE_OVM_
// run the PWM compensation and current ignore algorithm
SVGENCURRENT_compPwmData(svgencurrentHandle[HAL_MTR1],&(gPwmData[HAL_MTR1].Tabc),&gPwmData_prev[HAL_MTR1]);
#endif
// write the PWM compare values
HAL_writePwmData(halHandleMtr[HAL_MTR1],&gPwmData[HAL_MTR1]);
#ifdef _ENABLE_OVM_
{
SVGENCURRENT_IgnoreShunt_e ignoreShuntNextCycle_M1 = SVGENCURRENT_getIgnoreShunt(svgencurrentHandle[HAL_MTR1]);
SVGENCURRENT_VmidShunt_e midVolShunt_M1 = SVGENCURRENT_getVmid(svgencurrentHandle[HAL_MTR1]);
// Set trigger point in the middle of the low side pulse
HAL_setTrigger(halHandleMtr[HAL_MTR1],ignoreShuntNextCycle_M1,midVolShunt_M1);
}
#endif
//operation for second motor
#ifdef _ENABLE_OVM_
SVGENCURRENT_MeasureShunt_e measurableShuntThisCycle_M2 = SVGENCURRENT_getMode(svgencurrentHandle[HAL_MTR2]);
#endif
// convert the ADC data
HAL_readAdcData(halHandle,halHandleMtr[HAL_MTR2],&gAdcData[HAL_MTR2]);
#ifdef _ENABLE_OVM_
// run the current reconstruction algorithm
SVGENCURRENT_RunRegenCurrent(svgencurrentHandle[HAL_MTR2], (MATH_vec3 *)(gAdcData[HAL_MTR2].I.value));
gIavg[HAL_MTR2].value[0] += (gAdcData[HAL_MTR2].I.value[0] - gIavg[HAL_MTR2].value[0])>>gIavg_shift[HAL_MTR2];
gIavg[HAL_MTR2].value[1] += (gAdcData[HAL_MTR2].I.value[1] - gIavg[HAL_MTR2].value[1])>>gIavg_shift[HAL_MTR2];
gIavg[HAL_MTR2].value[2] += (gAdcData[HAL_MTR2].I.value[2] - gIavg[HAL_MTR2].value[2])>>gIavg_shift[HAL_MTR2];
if(measurableShuntThisCycle_M2 > two_phase_measurable)
{
gAdcData[HAL_MTR2].I.value[0] = gIavg[HAL_MTR2].value[0];
gAdcData[HAL_MTR2].I.value[1] = gIavg[HAL_MTR2].value[1];
gAdcData[HAL_MTR2].I.value[2] = gIavg[HAL_MTR2].value[2];
}
#endif
// run the flying start
//FS_run(ctrlHandle[HAL_MTR2], fsHandle[HAL_MTR2]);
// run the controller
CTRL_run(ctrlHandle[HAL_MTR2],halHandleMtr[HAL_MTR2],&gAdcData[HAL_MTR2],&gPwmData[HAL_MTR2]);
#ifdef _ENABLE_OVM_
// run the PWM compensation and current ignore algorithm
SVGENCURRENT_compPwmData(svgencurrentHandle[HAL_MTR2],&(gPwmData[HAL_MTR2].Tabc),&gPwmData_prev[HAL_MTR2]);
#endif
// write the PWM compare values
HAL_writePwmData(halHandleMtr[HAL_MTR2],&gPwmData[HAL_MTR2]);
#ifdef _ENABLE_OVM_
{
SVGENCURRENT_IgnoreShunt_e ignoreShuntNextCycle_M2 = SVGENCURRENT_getIgnoreShunt(svgencurrentHandle[HAL_MTR2]);
SVGENCURRENT_VmidShunt_e midVolShunt_M2 = SVGENCURRENT_getVmid(svgencurrentHandle[HAL_MTR2]);
// Set trigger point in the middle of the low side pulse
HAL_setTrigger(halHandleMtr[HAL_MTR2],ignoreShuntNextCycle_M2,midVolShunt_M2);
}
#endif
// setup the controller
CTRL_setup(ctrlHandle[HAL_MTR1]);
CTRL_setup(ctrlHandle[HAL_MTR2]);
// read the timer 1 value and update the CPU usage module
timer1Cnt = HAL_readTimerCnt(halHandle,2);
CPU_TIME_run(cpu_timeHandle[HAL_MTR1],timer1Cnt);
return;
} // end of motor1_ISR() function
#else
// motor1_ISR
interrupt void motor1_ISR(void)
{
// read the timer 1 value and update the CPU usage module
uint32_t timer1Cnt = HAL_readTimerCnt(halHandle,2);
CPU_TIME_updateCnts(cpu_timeHandle[HAL_MTR1],timer1Cnt);
SVGENCURRENT_MeasureShunt_e measurableShuntThisCycle_M1 = SVGENCURRENT_getMode(svgencurrentHandle[HAL_MTR1]);
// acknowledge the ADC interrupt
HAL_acqAdcInt(halHandle,ADC_IntNumber_1);
// convert the ADC data
HAL_readAdcData(halHandle,halHandleMtr[HAL_MTR1],&gAdcData[HAL_MTR1]);
// run the current reconstruction algorithm
SVGENCURRENT_RunRegenCurrent(svgencurrentHandle[HAL_MTR1], (MATH_vec3 *)(gAdcData[HAL_MTR1].I.value));
gIavg[HAL_MTR1].value[0] += (gAdcData[HAL_MTR1].I.value[0] - gIavg[HAL_MTR1].value[0])>>gIavg_shift[HAL_MTR1];
gIavg[HAL_MTR1].value[1] += (gAdcData[HAL_MTR1].I.value[1] - gIavg[HAL_MTR1].value[1])>>gIavg_shift[HAL_MTR1];
gIavg[HAL_MTR1].value[2] += (gAdcData[HAL_MTR1].I.value[2] - gIavg[HAL_MTR1].value[2])>>gIavg_shift[HAL_MTR1];
if(measurableShuntThisCycle_M1 > two_phase_measurable)
{
gAdcData[HAL_MTR1].I.value[0] = gIavg[HAL_MTR1].value[0];
gAdcData[HAL_MTR1].I.value[1] = gIavg[HAL_MTR1].value[1];
gAdcData[HAL_MTR1].I.value[2] = gIavg[HAL_MTR1].value[2];
}
// run the controller
CTRL_run(ctrlHandle[HAL_MTR1],halHandleMtr[HAL_MTR1],&gAdcData[HAL_MTR1],&gPwmData[HAL_MTR1]);
// run the PWM compensation and current ignore algorithm
SVGENCURRENT_compPwmData(svgencurrentHandle[HAL_MTR1],&(gPwmData[HAL_MTR1].Tabc),&gPwmData_prev[HAL_MTR1]);
// write the PWM compare values
HAL_writePwmData(halHandleMtr[HAL_MTR1],&gPwmData[HAL_MTR1]);
{
SVGENCURRENT_IgnoreShunt_e ignoreShuntNextCycle_M1 = SVGENCURRENT_getIgnoreShunt(svgencurrentHandle[HAL_MTR1]);
SVGENCURRENT_VmidShunt_e midVolShunt_M1 = SVGENCURRENT_getVmid(svgencurrentHandle[HAL_MTR1]);
// Set trigger point in the middle of the low side pulse
HAL_setTrigger(halHandleMtr[HAL_MTR1],ignoreShuntNextCycle_M1,midVolShunt_M1);
}
// setup the controller
CTRL_setup(ctrlHandle[HAL_MTR1]);
// get the estimator angle and frequency values
gMotorVars[HAL_MTR1].angle_est_pu = EST_getAngle_pu(ctrlHandle[HAL_MTR1]->estHandle);
gMotorVars[HAL_MTR1].speed_est_pu = EST_getFm_pu(ctrlHandle[HAL_MTR1]->estHandle);
gDacData.value[0] = gMotorVars[HAL_MTR1].angle_est_pu;
gDacData.value[1] = gMotorVars[HAL_MTR1].speed_est_pu;
gDacData.value[2] = gMotorVars[HAL_MTR2].angle_est_pu;
gDacData.value[3] = gMotorVars[HAL_MTR2].speed_est_pu;
HAL_writeDacData(halHandle,&gDacData);
// read the timer 1 value and update the CPU usage module
timer1Cnt = HAL_readTimerCnt(halHandle,2);
CPU_TIME_run(cpu_timeHandle[HAL_MTR1],timer1Cnt);
return;
} // end of motor1_ISR() function
//motor2_ISR
interrupt void motor2_ISR(void)
{
// read the timer 1 value and update the CPU usage module
uint32_t timer1Cnt = HAL_readTimerCnt(halHandle,2);
CPU_TIME_updateCnts(cpu_timeHandle[HAL_MTR2],timer1Cnt);
SVGENCURRENT_MeasureShunt_e measurableShuntThisCycle_M2 = SVGENCURRENT_getMode(svgencurrentHandle[HAL_MTR2]);
// acknowledge the ADC interrupt
HAL_acqAdcInt(halHandle,ADC_IntNumber_2);
// convert the ADC data
HAL_readAdcData(halHandle,halHandleMtr[HAL_MTR2],&gAdcData[HAL_MTR2]);
// run the current reconstruction algorithm
SVGENCURRENT_RunRegenCurrent(svgencurrentHandle[HAL_MTR2], (MATH_vec3 *)(gAdcData[HAL_MTR2].I.value));
gIavg[HAL_MTR2].value[0] += (gAdcData[HAL_MTR2].I.value[0] - gIavg[HAL_MTR2].value[0])>>gIavg_shift[HAL_MTR2];
gIavg[HAL_MTR2].value[1] += (gAdcData[HAL_MTR2].I.value[1] - gIavg[HAL_MTR2].value[1])>>gIavg_shift[HAL_MTR2];
gIavg[HAL_MTR2].value[2] += (gAdcData[HAL_MTR2].I.value[2] - gIavg[HAL_MTR2].value[2])>>gIavg_shift[HAL_MTR2];
if(measurableShuntThisCycle_M2 > two_phase_measurable)
{
gAdcData[HAL_MTR2].I.value[0] = gIavg[HAL_MTR2].value[0];
gAdcData[HAL_MTR2].I.value[1] = gIavg[HAL_MTR2].value[1];
gAdcData[HAL_MTR2].I.value[2] = gIavg[HAL_MTR2].value[2];
}
// run the controller
CTRL_run(ctrlHandle[HAL_MTR2],halHandleMtr[HAL_MTR2],&gAdcData[HAL_MTR2],&gPwmData[HAL_MTR2]);
// run the PWM compensation and current ignore algorithm
SVGENCURRENT_compPwmData(svgencurrentHandle[HAL_MTR2],&(gPwmData[HAL_MTR2].Tabc),&gPwmData_prev[HAL_MTR2]);
// write the PWM compare values
HAL_writePwmData(halHandleMtr[HAL_MTR2],&gPwmData[HAL_MTR2]);
{
SVGENCURRENT_IgnoreShunt_e ignoreShuntNextCycle_M2 = SVGENCURRENT_getIgnoreShunt(svgencurrentHandle[HAL_MTR2]);
SVGENCURRENT_VmidShunt_e midVolShunt_M2 = SVGENCURRENT_getVmid(svgencurrentHandle[HAL_MTR2]);
// Set trigger point in the middle of the low side pulse
HAL_setTrigger(halHandleMtr[HAL_MTR2],ignoreShuntNextCycle_M2,midVolShunt_M2);
}
// setup the controller
CTRL_setup(ctrlHandle[HAL_MTR2]);
// get the estimator angle and frequency values
gMotorVars[HAL_MTR2].angle_est_pu = EST_getAngle_pu(ctrlHandle[HAL_MTR2]->estHandle);
gMotorVars[HAL_MTR2].speed_est_pu = EST_getFm_pu(ctrlHandle[HAL_MTR2]->estHandle);
// read the timer 1 value and update the CPU usage module
timer1Cnt = HAL_readTimerCnt(halHandle,2);
CPU_TIME_run(cpu_timeHandle[HAL_MTR2],timer1Cnt);
return;
} // end of mainISR() function
#endif
void updateGlobalVariables_motor(CTRL_Handle handle, const uint_least8_t mtrNum)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
// get the speed estimate
gMotorVars[mtrNum].Speed_krpm = EST_getSpeed_krpm(obj->estHandle);
// get the real time speed reference coming out of the speed trajectory generator
gMotorVars[mtrNum].SpeedTraj_krpm = _IQmpy(CTRL_getSpd_int_ref_pu(handle),EST_get_pu_to_krpm_sf(obj->estHandle));
// get the torque estimate
// gMotorVars[mtrNum].Torque_Nm = USER_computeTorque_Nm(handle, gTorque_Flux_Iq_pu_to_Nm_sf[mtrNum], gTorque_Ls_Id_Iq_pu_to_Nm_sf[mtrNum]);
// get the magnetizing current
gMotorVars[mtrNum].MagnCurr_A = EST_getIdRated(obj->estHandle);
// get the rotor resistance
gMotorVars[mtrNum].Rr_Ohm = EST_getRr_Ohm(obj->estHandle);
// get the stator resistance
gMotorVars[mtrNum].Rs_Ohm = EST_getRs_Ohm(obj->estHandle);
// get the stator inductance in the direct coordinate direction
gMotorVars[mtrNum].Lsd_H = EST_getLs_d_H(obj->estHandle);
// get the stator inductance in the quadrature coordinate direction
gMotorVars[mtrNum].Lsq_H = EST_getLs_q_H(obj->estHandle);
// get the flux in V/Hz in floating point
gMotorVars[mtrNum].Flux_VpHz = EST_getFlux_VpHz(obj->estHandle);
// get the flux in Wb in fixed point
gMotorVars[mtrNum].Flux_Wb = _IQmpy(EST_getFlux_pu(obj->estHandle),gFlux_pu_to_Wb_sf[mtrNum]);
// get the controller state
gMotorVars[mtrNum].CtrlState = CTRL_getState(handle);
// get the estimator state
gMotorVars[mtrNum].EstState = EST_getState(obj->estHandle);
// read Vd and Vq vectors per units
gMotorVars[mtrNum].Vd = CTRL_getVd_out_pu(handle);
gMotorVars[mtrNum].Vq = CTRL_getVq_out_pu(handle);
// calculate vector Vs in per units
gMotorVars[mtrNum].Vs = _IQsqrt(_IQmpy(gMotorVars[mtrNum].Vd, gMotorVars[mtrNum].Vd) + _IQmpy(gMotorVars[mtrNum].Vq, gMotorVars[mtrNum].Vq));
// read Id and Iq vectors in amps
// gMotorVars[mtrNum].Id_A = _IQmpy(CTRL_getId_in_pu(handle), _IQ(USER_IQ_FULL_SCALE_CURRENT_A));
// gMotorVars[mtrNum].Iq_A = _IQmpy(CTRL_getIq_in_pu(handle), _IQ(USER_IQ_FULL_SCALE_CURRENT_A));
gMotorVars[mtrNum].Id_A = _IQmpy(CTRL_getId_in_pu(handle), gMotorVars[mtrNum].current_pu_to_A_sf);
gMotorVars[mtrNum].Iq_A = _IQmpy(CTRL_getIq_in_pu(handle), gMotorVars[mtrNum].current_pu_to_A_sf);
// calculate vector Is in amps
gMotorVars[mtrNum].Is_A = _IQsqrt(_IQmpy(gMotorVars[mtrNum].Id_A, gMotorVars[mtrNum].Id_A) + _IQmpy(gMotorVars[mtrNum].Iq_A, gMotorVars[mtrNum].Iq_A));
// Get the DC buss voltage
// gMotorVars[mtrNum].VdcBus_kV = _IQmpy(gAdcData[mtrNum].dcBus,_IQ(USER_IQ_FULL_SCALE_VOLTAGE_V/1000.0));
gMotorVars[mtrNum].VdcBus_kV = _IQmpy(gAdcData[mtrNum].dcBus, gMotorVars[mtrNum].voltage_pu_to_kv_sf);
// enable/disable the use of motor parameters being loaded from user.h
CTRL_setFlag_enableUserMotorParams(ctrlHandle[mtrNum],gMotorVars[mtrNum].Flag_enableUserParams);
// Enable the Library internal PI. Iq is referenced by the speed PI now
CTRL_setFlag_enableSpeedCtrl(ctrlHandle[mtrNum], gMotorVars[mtrNum].Flag_enableSpeedCtrl);
// enable/disable automatic calculation of bias values
CTRL_setFlag_enableOffset(ctrlHandle[mtrNum],gMotorVars[mtrNum].Flag_enableOffsetcalc);
// enable/disable dc bus voltage compensation
CTRL_setFlag_enableDcBusComp(ctrlHandle[mtrNum], gMotorVars[mtrNum].Flag_enableDcBusComp);
// enable/disable Rs recalibration during motor startup
EST_setFlag_enableRsRecalc(obj->estHandle,gMotorVars[mtrNum].Flag_enableRsRecalc);
return;
} // end of updateGlobalVariables_motor() function
void updateKpKiGains(CTRL_Handle handle, const uint_least8_t mtrNum)
{
if((gMotorVars[mtrNum].CtrlState == CTRL_State_OnLine) && (gMotorVars[mtrNum].Flag_MotorIdentified == true) && (Flag_Latch_softwareUpdate[mtrNum] == false))
{
// set the kp and ki speed values from the watch window
CTRL_setKp(handle,CTRL_Type_PID_spd,gMotorVars[mtrNum].Kp_spd);
CTRL_setKi(handle,CTRL_Type_PID_spd,gMotorVars[mtrNum].Ki_spd);
// set the kp and ki current values for Id and Iq from the watch window
CTRL_setKp(handle,CTRL_Type_PID_Id,gMotorVars[mtrNum].Kp_Idq);
CTRL_setKi(handle,CTRL_Type_PID_Id,gMotorVars[mtrNum].Ki_Idq);
CTRL_setKp(handle,CTRL_Type_PID_Iq,gMotorVars[mtrNum].Kp_Idq);
CTRL_setKi(handle,CTRL_Type_PID_Iq,gMotorVars[mtrNum].Ki_Idq);
}
return;
} // end of updateKpKiGains() function
void recalcKpKi(CTRL_Handle handle, const uint_least8_t mtrNum)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
if((EST_isMotorIdentified(obj->estHandle) == false) && (EstState == EST_State_Rs))
{
float_t Lhf = CTRL_getLhf(handle);
float_t Rhf = CTRL_getRhf(handle);
float_t RhfoverLhf = Rhf/Lhf;
// _iq Kp = _IQ(0.25*Lhf*USER_IQ_FULL_SCALE_CURRENT_A/(USER_CTRL_PERIOD_sec*USER_IQ_FULL_SCALE_VOLTAGE_V));
_iq Kp = _IQ(0.25*Lhf*gUserParams[mtrNum].iqFullScaleCurrent_A/(gUserParams[mtrNum].ctrlPeriod_sec*gUserParams[mtrNum].iqFullScaleVoltage_V));
// _iq Ki = _IQ(RhfoverLhf*USER_CTRL_PERIOD_sec);
_iq Ki = _IQ(RhfoverLhf*gUserParams[mtrNum].ctrlPeriod_sec);
// set Rhf/Lhf
CTRL_setRoverL(handle,RhfoverLhf);
// set the controller proportional gains
CTRL_setKp(handle,CTRL_Type_PID_Id,Kp);
CTRL_setKp(handle,CTRL_Type_PID_Iq,Kp);
// set the Id controller gains
CTRL_setKi(handle,CTRL_Type_PID_Id,Ki);
PID_setKi(obj->pidHandle_Id,Ki);
// set the Iq controller gains
CTRL_setKi(handle,CTRL_Type_PID_Iq,Ki);
PID_setKi(obj->pidHandle_Iq,Ki);
}
return;
} // end of recalcKpKi() function
//@} //defgroup
// end of file
hal_obj_2motors.h
#ifndef _HAL_OBJ_2MOTORS_H_
#define _HAL_OBJ_2MOTORS_H_
/* --COPYRIGHT--,BSD
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file solutions/instaspin_foc/src/hal_obj_2motors.h
//! \brief Defines the structures for the HAL object
//!
//! (C) Copyright 2012, Texas Instruments, Inc.
// drivers
#include "sw/drivers/adc/src/32b/f28x/f2806x/adc.h"
#include "sw/drivers/clk/src/32b/f28x/f2806x/clk.h"
#include "sw/drivers/cpu/src/32b/f28x/f2806x/cpu.h"
#include "sw/drivers/flash/src/32b/f28x/f2806x/flash.h"
#include "sw/drivers/gpio/src/32b/f28x/f2806x/gpio.h"
#include "sw/drivers/osc/src/32b/f28x/f2806x/osc.h"
#include "sw/drivers/pie/src/32b/f28x/f2806x/pie.h"
#include "sw/drivers/pll/src/32b/f28x/f2806x/pll.h"
#include "sw/drivers/pwm/src/32b/f28x/f2806x/pwm.h"
#include "sw/drivers/pwmdac/src/32b/f28x/f2806x/pwmdac.h"
#include "sw/drivers/pwr/src/32b/f28x/f2806x/pwr.h"
#include "sw/drivers/spi/src/32b/f28x/f2806x/spi.h"
#include "sw/drivers/timer/src/32b/f28x/f2806x/timer.h"
#include "sw/drivers/wdog/src/32b/f28x/f2806x/wdog.h"
#include "sw/drivers/drvic/drv8301/src/32b/f28x/f2806x/drv8301.h"
#include "sw/drivers/sci/src/32b/f28x/f2806x/sci.h"
#ifdef QEP
#include "sw/drivers/qep/src/32b/f28x/f2806x/qep.h"
#endif
// modules
#include "sw/modules/offset/src/32b/offset.h"
#include "sw/modules/types/src/types.h"
#include "sw/modules/usDelay/src/32b/usDelay.h"
// platforms
#include "user_motor1.h"
#include "user_motor2.h"
//!
//!
//! \defgroup HAL_OBJ HAL_OBJ
//!
//@{
#ifdef __cplusplus
extern "C" {
#endif
// **************************************************************************
// the typedefs
//! \brief Enumeration for the Motor setup
//!
typedef enum
{
HAL_MTR1=0, //!< Select Motor 1
HAL_MTR2=1 //!< Select Motor 2
} HAL_MtrSelect_e;
//! \brief Defines the ADC data
//! \details This data structure contains the voltage and current values that are used when
//! performing a HAL_AdcRead and then this structure is passed to the CTRL controller
//! and the FAST estimator.
//!
typedef struct _HAL_AdcData_t_
{
MATH_vec3 I; //!< the current values
MATH_vec3 V; //!< the voltage values
_iq dcBus; //!< the dcBus value
} HAL_AdcData_t;
//! \brief Defines the DAC data
//! \details This data structure contains the pwm values that are used for the DAC output
//! on a lot of the hardware kits for debugging.
//!
typedef struct _HAL_DacData_t_
{
uint16_t PeriodMax; //!<
_iq value[4]; //!< the DAC data
_iq offset[4]; //!< the DAC data
_iq gain[4]; //!< the DAC data
} HAL_DacData_t;
//! \brief Defines the PWM data
//! \details This structure contains the pwm voltage values for the three phases. A
//! HAL_PwmData_t variable is filled with values from, for example, a space
//! vector modulator and then sent to functions like HAL_writePwmData() to
//! write to the PWM peripheral.
//!
typedef struct _HAL_PwmData_t_
{
MATH_vec3 Tabc; //!< the PWM time-durations for each motor phase
} HAL_PwmData_t;
//! \brief Defines the hardware abstraction layer (HAL) data
//! \details The HAL object contains all handles to peripherals. When accessing a
//! peripheral on a processor, use a HAL function along with the HAL handle
//! for that processor to access its peripherals.
//!
typedef struct _HAL_Obj_
{
ADC_Handle adcHandle; //!< the ADC handle
CLK_Handle clkHandle; //!< the clock handle
CPU_Handle cpuHandle; //!< the CPU handle
FLASH_Handle flashHandle; //!< the flash handle
GPIO_Handle gpioHandle; //!< the GPIO handle
OSC_Handle oscHandle; //!< the oscillator handlefs
PIE_Handle pieHandle; //<! the PIE handle
PLL_Handle pllHandle; //!< the PLL handle
// PWM_Handle pwmHandle[6]; //!< the PWM handles
PWMDAC_Handle pwmDacHandle[2]; //<! the PWMDAC handles
PWR_Handle pwrHandle; //<! the power handle
TIMER_Handle timerHandle[3]; //<! the timer handles
WDOG_Handle wdogHandle; //!< the watchdog handle
// _iq current_sf; //!< the current scale factor, amps_pu/cnt
//
// _iq voltage_sf; //!< the voltage scale factor, volts_pu/cnt
//
// uint_least8_t numCurrentSensors; //!< the number of current sensors
// uint_least8_t numVoltageSensors; //!< the number of voltage sensors
//
SPI_Handle spiAHandle; //!< the SPI handle
SPI_Handle spiBHandle; //!< the SPI handle
/*
* ADDED CODE
*/
SCI_Handle sciHandle;
/*
*
*/
// DRV8301_Handle drv8301Handle; //!< the drv8301 interface handle
// DRV8301_Obj drv8301; //!< the drv8301 interface object
} HAL_Obj;
//! \brief Defines the HAL handle
//! \details The HAL handle is a pointer to a HAL object. In all HAL functions
//! the HAL handle is passed so that the function knows what peripherals
//! are to be accessed.
//!
typedef struct _HAL_Obj_ *HAL_Handle;
////! \brief Defines the HAL object
////!
//extern HAL_Obj hal;
//! \brief Defines the hardware abstraction layer (HAL) data
//! \details The HAL object contains all handles to peripherals. When accessing a
//! peripheral on a processor, use a HAL function along with the HAL handle
//! for that processor to access its peripherals.
//!
typedef struct _HAL_Obj_MTR_
{
_iq current_sf; //!< the current scale factor, amps_pu/cnt
_iq voltage_sf; //!< the voltage scale factor, volts_pu/cnt
uint_least8_t numCurrentSensors; //!< the number of current sensors
uint_least8_t numVoltageSensors; //!< the number of voltage sensors
HAL_MtrSelect_e mtrNum; //!< the motor number
HAL_AdcData_t adcBias; //!< the ADC bias
OFFSET_Handle offsetHandle_I[3]; //!< the handles for the current offset estimators
OFFSET_Obj offset_I[3]; //!< the current offset objects
OFFSET_Handle offsetHandle_V[3]; //!< the handles for the voltage offset estimators
OFFSET_Obj offset_V[3]; //!< the voltage offset objects
PWM_Handle pwmHandle[3]; //<! the PWM handles for two motors
DRV8301_Handle drv8301Handle; //!< the drv8301 interface handle
DRV8301_Obj drv8301; //!< the drv8301 interface object
#ifdef QEP
QEP_Handle qepHandle; //!< the QEP handles
#endif
} HAL_Obj_mtr;
//! \brief Defines the HAL handle
//! \details The HAL handle is a pointer to a HAL object. In all HAL functions
//! the HAL handle is passed so that the function knows what peripherals
//! are to be accessed.
//!
typedef struct _HAL_Obj_MTR_ *HAL_Handle_mtr;
////! \brief Runs offset estimation
////! \details Offsets of the voltage and current feedbacks are required for good low
////! speed performance of the motor drive.
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] pAdcData The pointer to the ADC data
//inline void HAL_runOffsetEst(HAL_Handle handle,const HAL_AdcData_t *pAdcData)
//{
// uint_least8_t cnt;
// HAL_Obj *obj = (HAL_Obj *)handle;
// // estimate the current offsets
// for(cnt=0;cnt<obj->numCurrentSensors;cnt++)
// {
// OFFSET_run(obj->offsetHandle_I[cnt],pAdcData->I.value[cnt]);
// }
// // estimate the voltage offsets
// for(cnt=0;cnt<obj->numVoltageSensors;cnt++)
// {
// OFFSET_run(obj->offsetHandle_V[cnt],pAdcData->V.value[cnt]);
// }
// return;
//} // end of HAL_runOffsetEst() function
//! \brief Runs offset estimation
//! \details Offsets of the voltage and current feedbacks are required for good low
//! speed performance of the motor drive.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pAdcData The pointer to the ADC data
inline void HAL_runOffsetEst(HAL_Handle_mtr handleMtr,const HAL_AdcData_t *pAdcData)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
uint_least8_t cnt;
// estimate the current offsets
for(cnt=0;cnt<objMtr->numCurrentSensors;cnt++)
{
OFFSET_run(objMtr->offsetHandle_I[cnt],pAdcData->I.value[cnt]);
}
// estimate the voltage offsets
for(cnt=0;cnt<objMtr->numVoltageSensors;cnt++)
{
OFFSET_run(objMtr->offsetHandle_V[cnt],pAdcData->V.value[cnt]);
}
return;
} // end of HAL_runOffsetEst() function
#ifdef __cplusplus
}
#endif // extern "C"
//@} // ingroup
#endif // end of _HAL_OBJ_H_ definition
hal_2motors.h
#ifndef _HAL_2MOTORS_H_
#define _HAL_2MOTORS_H_
/* --COPYRIGHT--,BSD
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file solutions/instaspin_foc/boards/boostxldrv8301_revB/f28x/f2806x/src/hal_2motors.h
//! \brief Contains public interface to various functions related
//! to the HAL object
//!
//! (C) Copyright 2011, Texas Instruments, Inc.
// **************************************************************************
// the includes
// modules
// platforms
#include "hal_obj_2motors.h"
#include "sw/modules/svgen/src/32b/svgen_current.h"
//!
//!
//! \defgroup HAL HAL
//!
//@{
#ifdef __cplusplus
extern "C" {
#endif
// **************************************************************************
// the defines
//! \brief Defines the system clock frequency, MHz
#define USER_SYSTEM_FREQ_MHz (90.0)
//! \brief Defines that a DRV8301 chip SPI port is used on the board.
#define DRV8301_SPI
#define Device_cal (void (*)(void))0x3D7C80
//! \brief Defines used in oscillator calibration functions
//! \brief Defines the scale factor for Q15 fixed point numbers (2^15)
#define FP_SCALE 32768
//! \brief Defines the quantity added to Q15 numbers before converting to integer to round the number
#define FP_ROUND FP_SCALE/2
//! \brief Defines the amount to add to Q16.15 fixed point number to shift from a fine trim range of
//! \brief (-31 to 31) to (1 to 63). This guarantees that the trim is positive and can
//! \brief therefore be efficiently rounded
#define OSC_POSTRIM 32
#define OSC_POSTRIM_OFF FP_SCALE*OSC_POSTRIM
//! \brief The following functions return reference values stored in OTP.
//! \brief Defines the slope used to compensate oscillator 1 (fine trim steps / ADC code). Stored in fixed point Q15 format
#define getOsc1FineTrimSlope() (*(int16_t (*)(void))0x3D7E90)()
//! \brief Defines the oscillator 1 fine trim at high temp
#define getOsc1FineTrimOffset() (*(int16_t (*)(void))0x3D7E93)()
//! \brief Defines the oscillator 1 coarse trim
#define getOsc1CoarseTrim() (*(int16_t (*)(void))0x3D7E96)()
//! \brief Defines the slope used to compensate oscillator 2 (fine trim steps / ADC code). Stored
//! \brief in fixed point Q15 format.
#define getOsc2FineTrimSlope() (*(int16_t (*)(void))0x3D7E99)()
//! \brief Defines the oscillator 2 fine trim at high temp
#define getOsc2FineTrimOffset() (*(int16_t (*)(void))0x3D7E9C)()
//! \brief Defines the oscillator 2 coarse trim
#define getOsc2CoarseTrim() (*(int16_t (*)(void))0x3D7E9F)()
//! \brief Defines the ADC reading of temperature sensor at reference temperature for compensation
#define getRefTempOffset() (*(int16_t (*)(void))0x3D7EA2)()
//! \brief Defines the PWM deadband falling edge delay count (system clocks)
//!
#define HAL_PWM_DBFED_CNT 1
//! \brief Defines the PWM deadband rising edge delay count (system clocks)
//!
#define HAL_PWM_DBRED_CNT 1
//! \brief Defines the function to turn LEDs off
//!
#define HAL_turnLedOff HAL_setGpioLow
//! \brief Defines the function to turn LEDs on
//!
#define HAL_turnLedOn HAL_setGpioHigh
//! \brief Defines the function to turn LEDs on
//!
#define HAL_toggleLed HAL_toggleGpio
// **************************************************************************
// the typedefs
//! \brief Enumeration for the QEP setup
//!
typedef enum
{
HAL_Qep_QEP1=0, //!< Select QEP1
HAL_Qep_QEP2=1 //!< Select QEP2
} HAL_QepSelect_e;
//! \brief Enumeration for the LED numbers
//!
typedef enum
{
HAL_Gpio_LED2=GPIO_Number_34, //!< GPIO pin number for LaunchPad LED D9
HAL_Gpio_LED3=GPIO_Number_39 //!< GPIO pin number for LaunchPad LED D10
} HAL_LedNumber_e;
//! \brief Enumeration for the sensor types
//!
typedef enum
{
HAL_SensorType_Current=0, //!< Enumeration for current sensor
HAL_SensorType_Voltage //!< Enumeration for voltage sensor
} HAL_SensorType_e;
// **************************************************************************
// the globals
#ifdef _SINGLE_ISR_EN_
extern interrupt void motor_ISR(void);
#else
extern interrupt void motor1_ISR(void);
extern interrupt void motor2_ISR(void);
#endif
// **************************************************************************
// the function prototypes
//! \brief Acknowledges an interrupt from the ADC so that another ADC interrupt can
//! happen again.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] intNumber The interrupt number
static inline void HAL_acqAdcInt(HAL_Handle handle,const ADC_IntNumber_e intNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// clear the ADC interrupt flag
ADC_clearIntFlag(obj->adcHandle,intNumber);
// Acknowledge interrupt from PIE group 10
PIE_clearInt(obj->pieHandle,PIE_GroupNumber_10);
return;
} // end of HAL_acqAdcInt() function
//! \brief Acknowledges an interrupt from the PWM so that another PWM interrupt can
//! happen again.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pwmNumber The PWM number
static inline void HAL_acqPwmInt(HAL_Handle_mtr handleMtr,HAL_Handle handle,const PWM_Number_e pwmNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
// clear the PWM interrupt flag
PWM_clearIntFlag(objMtr->pwmHandle[pwmNumber]);
// clear the SOCA flag
PWM_clearSocAFlag(objMtr->pwmHandle[pwmNumber]);
// Acknowledge interrupt from PIE group 3
PIE_clearInt(obj->pieHandle,PIE_GroupNumber_3);
return;
} // end of HAL_acqPwmInt() function
//! \brief Acknowledges an interrupt from Timer 0 so that another Timer 0 interrupt can
//! happen again.
//! \param[in] handle The hardware abstraction layer (HAL) handle
static inline void HAL_acqTimer0Int(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// clear the Timer 0 interrupt flag
TIMER_clearFlag(obj->timerHandle[0]);
// Acknowledge interrupt from PIE group 1
PIE_clearInt(obj->pieHandle,PIE_GroupNumber_1);
return;
} // end of HAL_acqTimer0Int() function
//! \brief Executes calibration routines
//! \details Values for offset and gain are programmed into OTP memory at
//! the TI factory. This calls and internal function that programs
//! these offsets and gains into the ADC registers.
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_cal(HAL_Handle handle);
//! \brief Disables global interrupts
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_disableGlobalInts(HAL_Handle handle);
//! \brief Disables the watch dog
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_disableWdog(HAL_Handle handle);
//! \brief Disables the PWM device
//! \details Turns off the outputs of the EPWM peripherals which will put
//! the power switches into a high impedance state.
//! \param[in] handle The hardware abstraction layer (HAL) handle
static inline void HAL_disablePwm(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
PWM_setOneShotTrip(objMtr->pwmHandle[PWM_Number_1]);
PWM_setOneShotTrip(objMtr->pwmHandle[PWM_Number_2]);
PWM_setOneShotTrip(objMtr->pwmHandle[PWM_Number_3]);
return;
} // end of HAL_disablePwm() function
//! \brief Enables the ADC interrupts
//! \details Enables the ADC interrupt in the PIE, and CPU. Enables the
//! interrupt to be sent from the ADC peripheral.
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_enableAdcInts(HAL_Handle handle);
//! \brief Enables the debug interrupt
//! \details The debug interrupt is used for the real-time debugger. It is
//! not needed if the real-time debugger is not used. Clears
//! bit 1 of ST1.
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_enableDebugInt(HAL_Handle handle);
//! \brief Enables global interrupts
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_enableGlobalInts(HAL_Handle handle);
//! \brief Enables the 8301 device
//! \details Provides the correct timing to enable the drv8301
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_enableDrv(HAL_Handle_mtr handleMtr);
//! \brief Enables the PWM devices
//! \details Turns on the outputs of the EPWM peripheral which will allow
//! the power switches to be controlled.
//! \param[in] handle The hardware abstraction layer (HAL) handle
static inline void HAL_enablePwm(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
PWM_clearOneShotTrip(objMtr->pwmHandle[PWM_Number_1]);
PWM_clearOneShotTrip(objMtr->pwmHandle[PWM_Number_2]);
PWM_clearOneShotTrip(objMtr->pwmHandle[PWM_Number_3]);
return;
} // end of HAL_enablePwm() function
//! \brief Enables the PWM interrupt
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_enablePwmInt(HAL_Handle_mtr handleMtr,HAL_Handle handle);
//! \brief Enables the Timer 0 interrupt
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_enableTimer0Int(HAL_Handle handle);
//! \brief Gets the ADC delay value
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] socNumber The ADC SOC number
//! \return The ADC delay value
static inline ADC_SocSampleDelay_e HAL_getAdcSocSampleDelay(HAL_Handle handle,
const ADC_SocNumber_e socNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
return(ADC_getSocSampleDelay(obj->adcHandle,socNumber));
} // end of HAL_getAdcSocSampleDelay() function
////! \brief Gets the ADC bias value
////! \details The ADC bias contains the feedback circuit's offset and bias.
////! Bias is the mathematical offset used when a bi-polar signal
////! is read into a uni-polar ADC.
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \return The ADC bias value
//static inline _iq HAL_getBias(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// uint_least8_t sensorNumber)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
// _iq bias = _IQ(0.0);
//
// if(sensorType == HAL_SensorType_Current)
// {
// bias = obj->adcBias.I.value[sensorNumber];
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// bias = obj->adcBias.V.value[sensorNumber];
// }
//
// return(bias);
//} // end of HAL_getBias() function
//! \brief Gets the ADC bias value
//! \details The ADC bias contains the feedback circuit's offset and bias.
//! Bias is the mathematical offset used when a bi-polar signal
//! is read into a uni-polar ADC.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] sensorType The sensor type
//! \param[in] sensorNumber The sensor number
//! \return The ADC bias value
static inline _iq HAL_getBias(HAL_Handle_mtr handleMtr,
const HAL_SensorType_e sensorType,
uint_least8_t sensorNumber)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
_iq bias = _IQ(0.0);
if(sensorType == HAL_SensorType_Current)
{
bias = objMtr->adcBias.I.value[sensorNumber];
}
else if(sensorType == HAL_SensorType_Voltage)
{
bias = objMtr->adcBias.V.value[sensorNumber];
}
return(bias);
} // end of HAL_getBias() function
//! \brief Gets the current scale factor
//! \details The current scale factor is defined as
//! USER_ADC_FULL_SCALE_CURRENT_A/USER_IQ_FULL_SCALE_CURRENT_A.
//! This scale factor is not used when converting between PU amps
//! and real amps.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \return The current scale factor
static inline _iq HAL_getCurrentScaleFactor(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
return(objMtr->current_sf);
} // end of HAL_getCurrentScaleFactor() function
//! \brief Gets the number of current sensors
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \return The number of current sensors
static inline uint_least8_t HAL_getNumCurrentSensors(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
return(objMtr->numCurrentSensors);
} // end of HAL_getNumCurrentSensors() function
//! \brief Gets the number of voltage sensors
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \return The number of voltage sensors
static inline uint_least8_t HAL_getNumVoltageSensors(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
return(objMtr->numVoltageSensors);
} // end of HAL_getNumVoltageSensors() function
////! \brief Gets the value used to set the low pass filter pole for offset estimation
////! \details An IIR single pole low pass filter is used to find the feedback circuit's
////! offsets. This function returns the value of that pole.
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \return The value used to set the low pass filter pole, pu
//static inline _iq HAL_getOffsetBeta_lp_pu(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// const uint_least8_t sensorNumber)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
// _iq beta_lp_pu = _IQ(0.0);
//
// if(sensorType == HAL_SensorType_Current)
// {
// beta_lp_pu = OFFSET_getBeta(obj->offsetHandle_I[sensorNumber]);
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// beta_lp_pu = OFFSET_getBeta(obj->offsetHandle_V[sensorNumber]);
// }
//
// return(beta_lp_pu);
//} // end of HAL_getOffsetBeta_lp_pu() function
////! \brief Gets the offset value
////! \details The offsets that are calculated during the feedback circuits calibrations
////! are returned from the IIR filter object.
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \return The offset value
//static inline _iq HAL_getOffsetValue(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// const uint_least8_t sensorNumber)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
// _iq offset = _IQ(0.0);
//
// if(sensorType == HAL_SensorType_Current)
// {
// offset = OFFSET_getOffset(obj->offsetHandle_I[sensorNumber]);
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// offset = OFFSET_getOffset(obj->offsetHandle_V[sensorNumber]);
// }
//
// return(offset);
//} // end of HAL_getOffsetValue() function
//! \brief Gets the voltage scale factor
//! \details The voltage scale factor is defined as
//! USER_ADC_FULL_SCALE_VOLTAGE_V/USER_IQ_FULL_SCALE_VOLTAGE_V.
//! This scale factor is not used when converting between PU volts
//! and real volts.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \return The voltage scale factor
static inline _iq HAL_getVoltageScaleFactor(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
return(objMtr->voltage_sf);
} // end of HAL_getVoltageScaleFactor() function
//! \brief Configures the fault protection logic
//! \details Sets up the trip zone inputs so that when a comparator
//! signal from outside the micro-controller trips a fault,
//! the EPWM peripheral blocks will force the
//! power switches into a high impedance state.
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupFaults(HAL_Handle_mtr handleMtr);
//! \brief Initializes the hardware abstraction layer (HAL) object
//! \details Initializes all handles to the microcontroller peripherals.
//! Returns a handle to the HAL object.
//! \param[in] pMemory A pointer to the memory for the hardware abstraction layer object
//! \param[in] numBytes The number of bytes allocated for the hardware abstraction layer object, bytes
//! \return The hardware abstraction layer (HAL) object handle
extern HAL_Handle HAL_init(void *pMemory,const size_t numBytes);
//! \brief Initializes the hardware abstraction layer motor object
//! \details Initializes and eturns a handle to the HAL motor object.
//! \param[in] pMemory A pointer to the memory for the hardware abstraction layer object
//! \param[in] numBytes The number of bytes allocated for the hardware abstraction layer object, bytes
//! \return The hardware abstraction layer motor object handle
HAL_Handle_mtr HAL_init_mtr(void *pMemory,const size_t numBytes,const HAL_MtrSelect_e mtrNum);
//! \brief Initializes the interrupt vector table
//! \details Points ADCINT1 to motor1_ISR
//! \details Points ADCINT2 to motor2_ISR
//! \param[in] handle The hardware abstraction layer (HAL) handle
static inline void HAL_initIntVectorTable(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
PIE_Obj *pie = (PIE_Obj *)obj->pieHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
#ifdef _SINGLE_ISR_EN_
pie->ADCINT1 = &motor_ISR;
#else
pie->ADCINT1 = &motor1_ISR;
pie->ADCINT2 = &motor2_ISR;
#endif
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of HAL_initIntVectorTable() function
////! \brief Reads the ADC data
////! \details Reads in the ADC result registers, adjusts for offsets, and
////! scales the values according to the settings in user.h. The
////! structure gAdcData holds three phase voltages, three line
////! currents, and one DC bus voltage.
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] pAdcData A pointer to the ADC data buffer
//static inline void HAL_readAdcData(HAL_Handle handle,HAL_AdcData_t *pAdcData)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
// _iq value;
// _iq current_sf = HAL_getCurrentScaleFactor(handle);
// _iq voltage_sf = HAL_getVoltageScaleFactor(handle);
//
//
// // convert current A
// // sample the first sample twice due to errata sprz342f, ignore the first sample
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_1);
// value = _IQ12mpy(value,current_sf) - obj->adcBias.I.value[0]; // divide by 2^numAdcBits = 2^12
// pAdcData->I.value[0] = value;
//
// // convert current B
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_2);
// value = _IQ12mpy(value,current_sf) - obj->adcBias.I.value[1]; // divide by 2^numAdcBits = 2^12
// pAdcData->I.value[1] = value;
//
// // convert current C
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_3);
// value = _IQ12mpy(value,current_sf) - obj->adcBias.I.value[2]; // divide by 2^numAdcBits = 2^12
// pAdcData->I.value[2] = value;
//
// // convert voltage A
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_4);
// value = _IQ12mpy(value,voltage_sf) - obj->adcBias.V.value[0]; // divide by 2^numAdcBits = 2^12
// pAdcData->V.value[0] = value;
//
// // convert voltage B
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_5);
// value = _IQ12mpy(value,voltage_sf) - obj->adcBias.V.value[1]; // divide by 2^numAdcBits = 2^12
// pAdcData->V.value[1] = value;
//
// // convert voltage C
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_6);
// value = _IQ12mpy(value,voltage_sf) - obj->adcBias.V.value[2]; // divide by 2^numAdcBits = 2^12
// pAdcData->V.value[2] = value;
//
// // read the dcBus voltage value
// value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_7); // divide by 2^numAdcBits = 2^12
// value = _IQ12mpy(value,voltage_sf);
// pAdcData->dcBus = value;
//
// return;
//} // end of HAL_readAdcData() function
//! \brief Reads the ADC data
//! \details Reads in the ADC result registers, and
//! scales the values according to the settings in user.h. The
//! structure gAdcData holds three phase voltages, three line
//! currents, and one DC bus voltage.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pAdcData A pointer to the ADC data buffer
static inline void HAL_readAdcData(HAL_Handle handle,HAL_Handle_mtr handleMtr,HAL_AdcData_t *pAdcData)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
HAL_Obj *obj = (HAL_Obj *)handle;
_iq value;
_iq current_sf = HAL_getCurrentScaleFactor(handleMtr);
_iq voltage_sf = HAL_getVoltageScaleFactor(handleMtr);
HAL_MtrSelect_e mtrNum = objMtr->mtrNum;
if(mtrNum == HAL_MTR1)
{
// convert current A
// sample the first sample twice due to errata sprz342f, ignore the first sample
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_1);
value = _IQ12mpy(value,current_sf) - objMtr->adcBias.I.value[0]; // divide by 2^numAdcBits = 2^12
pAdcData->I.value[0] = value;
// convert current B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_2);
value = _IQ12mpy(value,current_sf) - objMtr->adcBias.I.value[1]; // divide by 2^numAdcBits = 2^12
pAdcData->I.value[1] = value;
// convert current C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_3);
value = _IQ12mpy(value,current_sf) - objMtr->adcBias.I.value[2]; // divide by 2^numAdcBits = 2^12
pAdcData->I.value[2] = value;
// convert voltage A
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_4);
value = _IQ12mpy(value,voltage_sf) - objMtr->adcBias.V.value[0]; // divide by 2^numAdcBits = 2^12
pAdcData->V.value[0] = value;
// convert voltage B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_5);
value = _IQ12mpy(value,voltage_sf) - objMtr->adcBias.V.value[1]; // divide by 2^numAdcBits = 2^12
pAdcData->V.value[1] = value;
// convert voltage C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_6);
value = _IQ12mpy(value,voltage_sf) - objMtr->adcBias.V.value[2]; // divide by 2^numAdcBits = 2^12
pAdcData->V.value[2] = value;
// read the dcBus voltage value
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_7); // divide by 2^numAdcBits = 2^12
value = _IQ12mpy(value,voltage_sf);
pAdcData->dcBus = value;
}
else
{
// convert current A
// sample the first sample twice due to errata sprz342f, ignore the first sample
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_9);
value = _IQ12mpy(value,current_sf) - objMtr->adcBias.I.value[0]; // divide by 2^numAdcBits = 2^12
pAdcData->I.value[0] = value;
// convert current B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_10);
value = _IQ12mpy(value,current_sf) - objMtr->adcBias.I.value[1]; // divide by 2^numAdcBits = 2^12
pAdcData->I.value[1] = value;
// convert current C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_11);
value = _IQ12mpy(value,current_sf) - objMtr->adcBias.I.value[2]; // divide by 2^numAdcBits = 2^12
pAdcData->I.value[2] = value;
// convert voltage A
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_12);
value = _IQ12mpy(value,voltage_sf) - objMtr->adcBias.V.value[0]; // divide by 2^numAdcBits = 2^12
pAdcData->V.value[0] = value;
// convert voltage B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_13);
value = _IQ12mpy(value,voltage_sf) - objMtr->adcBias.V.value[1]; // divide by 2^numAdcBits = 2^12
pAdcData->V.value[1] = value;
// convert voltage C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_14);
value = _IQ12mpy(value,voltage_sf) - objMtr->adcBias.V.value[2]; // divide by 2^numAdcBits = 2^12
pAdcData->V.value[2] = value;
// read the dcBus voltage value
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_15); // divide by 2^numAdcBits = 2^12
value = _IQ12mpy(value,voltage_sf);
pAdcData->dcBus = value;
}
return;
} // end of HAL_readAdcData() function
//! \brief Reads the ADC data
//! \details Reads in the ADC result registers, and
//! scales the values according to the settings in user.h. The
//! structure gAdcData holds three phase voltages, three line
//! currents, and one DC bus voltage.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pAdcData A pointer to the ADC data buffer
static inline void HAL_readAdcDataWithOffsets(HAL_Handle handle,HAL_Handle_mtr handleMtr,HAL_AdcData_t *pAdcData)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
HAL_Obj *obj = (HAL_Obj *)handle;
_iq value;
_iq current_sf = HAL_getCurrentScaleFactor(handleMtr);
_iq voltage_sf = HAL_getVoltageScaleFactor(handleMtr);
HAL_MtrSelect_e mtrNum = objMtr->mtrNum;
if(mtrNum == HAL_MTR1)
{
// convert current A
// sample the first sample twice due to errata sprz342f, ignore the first sample
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_1);
value = _IQ12mpy(value,current_sf); // divide by 2^numAdcBits = 2^12
pAdcData->I.value[0] = value;
// convert current B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_2);
value = _IQ12mpy(value,current_sf); // divide by 2^numAdcBits = 2^12
pAdcData->I.value[1] = value;
// convert current C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_3);
value = _IQ12mpy(value,current_sf); // divide by 2^numAdcBits = 2^12
pAdcData->I.value[2] = value;
// convert voltage A
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_4);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->V.value[0] = value;
// convert voltage B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_5);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->V.value[1] = value;
// convert voltage C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_6);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->V.value[2] = value;
// read the dcBus voltage value
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_7);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->dcBus = value;
}
else
{
// convert current A
// sample the first sample twice due to errata sprz342f, ignore the first sample
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_9);
value = _IQ12mpy(value,current_sf); // divide by 2^numAdcBits = 2^12
pAdcData->I.value[0] = value;
// convert current B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_10);
value = _IQ12mpy(value,current_sf); // divide by 2^numAdcBits = 2^12
pAdcData->I.value[1] = value;
// convert current C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_11);
value = _IQ12mpy(value,current_sf); // divide by 2^numAdcBits = 2^12
pAdcData->I.value[2] = value;
// convert voltage A
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_12);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->V.value[0] = value;
// convert voltage B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_13);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->V.value[1] = value;
// convert voltage C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_14);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->V.value[2] = value;
// read the dcBus voltage value
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_15);
value = _IQ12mpy(value,voltage_sf); // divide by 2^numAdcBits = 2^12
pAdcData->dcBus = value;
}
return;
} // end of HAL_readAdcDataWithOffsets() function
//! \brief Reads the ADC data
//! \details Reads in the ADC result registers, and
//! scales the values according to the settings in user.h. The
//! structure gAdcData holds three phase voltages, three line
//! currents, and one DC bus voltage.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pAdcData A pointer to the ADC data buffer
static inline void HAL_readDualAdcData(HAL_Handle handle,HAL_Handle_mtr handleMtr1, HAL_Handle_mtr handleMtr2, HAL_AdcData_t *pAdcData1, HAL_AdcData_t *pAdcData2)
{
HAL_Obj_mtr *objMtr1 = (HAL_Obj_mtr *)handleMtr1;
HAL_Obj_mtr *objMtr2 = (HAL_Obj_mtr *)handleMtr2;
HAL_Obj *obj = (HAL_Obj *)handle;
_iq value;
_iq current_sf_M1 = HAL_getCurrentScaleFactor(handleMtr1);
_iq voltage_sf_M1 = HAL_getVoltageScaleFactor(handleMtr1);
_iq current_sf_M2 = HAL_getCurrentScaleFactor(handleMtr2);
_iq voltage_sf_M2 = HAL_getVoltageScaleFactor(handleMtr2);
// M1
// convert current A
// sample the first sample twice due to errata sprz342f, ignore the first sample
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_1);
pAdcData1->I.value[0] = _IQ12mpy(value,current_sf_M1) - objMtr1->adcBias.I.value[0]; // divide by 2^numAdcBits = 2^12
// convert current B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_2);
pAdcData1->I.value[1] = _IQ12mpy(value,current_sf_M1) - objMtr1->adcBias.I.value[1]; // divide by 2^numAdcBits = 2^12
// convert current C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_3);
pAdcData1->I.value[2] = _IQ12mpy(value,current_sf_M1) - objMtr1->adcBias.I.value[2]; // divide by 2^numAdcBits = 2^12
// convert voltage A
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_4);
pAdcData1->V.value[0] = _IQ12mpy(value,voltage_sf_M1) - objMtr1->adcBias.V.value[0]; // divide by 2^numAdcBits = 2^12
// convert voltage B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_5);
pAdcData1->V.value[1] = _IQ12mpy(value,voltage_sf_M1) - objMtr1->adcBias.V.value[1]; // divide by 2^numAdcBits = 2^12
// convert voltage C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_6);
pAdcData1->V.value[2] = _IQ12mpy(value,voltage_sf_M1) - objMtr1->adcBias.V.value[2]; // divide by 2^numAdcBits = 2^12
// read the dcBus voltage value
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_7); // divide by 2^numAdcBits = 2^12
pAdcData1->dcBus = _IQ12mpy(value,voltage_sf_M1);
// M2
// convert current A
// sample the first sample twice due to errata sprz342f, ignore the first sample
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_9);
pAdcData2->I.value[0] = _IQ12mpy(value,current_sf_M2) - objMtr2->adcBias.I.value[0]; // divide by 2^numAdcBits = 2^12
// convert current B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_10);
pAdcData2->I.value[1] = _IQ12mpy(value,current_sf_M2) - objMtr2->adcBias.I.value[1]; // divide by 2^numAdcBits = 2^12
// convert current C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_11);
pAdcData2->I.value[2] = _IQ12mpy(value,current_sf_M2) - objMtr2->adcBias.I.value[2]; // divide by 2^numAdcBits = 2^12
// convert voltage A
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_12);
pAdcData2->V.value[0] = _IQ12mpy(value,voltage_sf_M2) - objMtr2->adcBias.V.value[0]; // divide by 2^numAdcBits = 2^12
// convert voltage B
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_13);
pAdcData2->V.value[1] = _IQ12mpy(value,voltage_sf_M2) - objMtr2->adcBias.V.value[1]; // divide by 2^numAdcBits = 2^12
// convert voltage C
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_14);
pAdcData2->V.value[2] = _IQ12mpy(value,voltage_sf_M2) - objMtr2->adcBias.V.value[2]; // divide by 2^numAdcBits = 2^12
// read the dcBus voltage value
value = (_iq)ADC_readResult(obj->adcHandle,ADC_ResultNumber_15); // divide by 2^numAdcBits = 2^12
pAdcData2->dcBus = _IQ12mpy(value,voltage_sf_M2);
return;
} // end of HAL_readAdcDataWithOffsets() function
//! \brief Reads the timer count
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] timerNumber The timer number, 0,1 or 2
//! \return The timer count
static inline uint32_t HAL_readTimerCnt(HAL_Handle handle,const uint_least8_t timerNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint32_t timerCnt = TIMER_getCount(obj->timerHandle[timerNumber]);
return(timerCnt);
} // end of HAL_readTimerCnt() function
//! \brief Reloads the timer
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] timerNumber The timer number, 0,1 or 2
static inline void HAL_reloadTimer(HAL_Handle handle,const uint_least8_t timerNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// reload the specified timer
TIMER_reload(obj->timerHandle[timerNumber]);
return;
} // end of HAL_reloadTimer() function
//! \brief Sets up the GATE object
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] handleMtr The hardware abstraction layer for the individual motor
//! \param[in] gpio The gpio to the enable pin of the drv8301
void HAL_setupGate(HAL_Handle_mtr handleMtr,SPI_Handle handleSpi,GPIO_Handle handleGpio,const GPIO_Number_e gpio);
//! \brief Starts the timer
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] timerNumber The timer number, 0,1 or 2
static inline void HAL_startTimer(HAL_Handle handle,const uint_least8_t timerNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// start the specified timer
TIMER_start(obj->timerHandle[timerNumber]);
return;
} // end of HAL_startTimer() function
//! \brief Stops the timer
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] timerNumber The timer number, 0,1 or 2
static inline void HAL_stopTimer(HAL_Handle handle,const uint_least8_t timerNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// stop the specified timer
TIMER_stop(obj->timerHandle[timerNumber]);
return;
} // end of HAL_stopTimer() function
//! \brief Sets the motor number
//! \param[in] handle The motor hardware abstraction layer handle
//! \param[in] mtrNum The motor number HAL_MTR1, or HAL_MTR2
static inline void HAL_setMotorNumber(HAL_Handle_mtr handleMtr,const HAL_MtrSelect_e mtrNum)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
// set the motor number
objMtr->mtrNum = mtrNum;
return;
} // end of HAL_setMotorNumber() function
//! \brief Sets the timer period
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] timerNumber The timer number, 0,1 or 2
//! \param[in] period The timer period
static inline void HAL_setTimerPeriod(HAL_Handle handle,const uint_least8_t timerNumber, const uint32_t period)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// set the period
TIMER_setPeriod(obj->timerHandle[timerNumber], period);
return;
} // end of HAL_setTimerPeriod() function
//! \brief Gets the timer period
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] timerNumber The timer number, 0,1 or 2
//! \return The timer period
static inline uint32_t HAL_getTimerPeriod(HAL_Handle handle,const uint_least8_t timerNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint32_t timerPeriod = TIMER_getPeriod(obj->timerHandle[timerNumber]);
return(timerPeriod);
} // end of HAL_getTimerPeriod() function
//! \brief Sets the ADC SOC sample delay value
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] socNumber The SOC number
//! \param[in] sampleDelay The delay value for the ADC
static inline void HAL_setAdcSocSampleDelay(HAL_Handle handle,
const ADC_SocNumber_e socNumber,
const ADC_SocSampleDelay_e sampleDelay)
{
HAL_Obj *obj = (HAL_Obj *)handle;
ADC_setSocSampleDelay(obj->adcHandle,socNumber,sampleDelay);
return;
} // end of HAL_setAdcSocSampleDelay() function
////! \brief Sets the ADC bias value
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \param[in] bias The ADC bias value
//static inline void HAL_setBias(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// uint_least8_t sensorNumber,
// const _iq bias)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
//
// if(sensorType == HAL_SensorType_Current)
// {
// obj->adcBias.I.value[sensorNumber] = bias;
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// obj->adcBias.V.value[sensorNumber] = bias;
// }
//
// return;
//} // end of HAL_setBias() function
//! \brief Sets the ADC bias value
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] sensorType The sensor type
//! \param[in] sensorNumber The sensor number
//! \param[in] bias The ADC bias value
static inline void HAL_setBias(HAL_Handle_mtr handleMtr,
const HAL_SensorType_e sensorType,
uint_least8_t sensorNumber,
const _iq bias)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
if(sensorType == HAL_SensorType_Current)
{
objMtr->adcBias.I.value[sensorNumber] = bias;
}
else if(sensorType == HAL_SensorType_Voltage)
{
objMtr->adcBias.V.value[sensorNumber] = bias;
}
return;
} // end of HAL_setBias() function
//! \brief Sets the GPIO pin high
//! \details Takes in the enumeration GPIO_Number_e and sets that GPIO
//! pin high.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] gpioNumber The GPIO number
static inline void HAL_setGpioHigh(HAL_Handle handle,const GPIO_Number_e gpioNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// set GPIO high
GPIO_setHigh(obj->gpioHandle,gpioNumber);
return;
} // end of HAL_setGpioHigh() function
//! \brief Reads the specified GPIO pin
//! \details Takes in the enumeration GPIO_Number_e and reads that GPIO
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] gpioNumber The GPIO number
static inline bool HAL_readGpio(HAL_Handle handle,const GPIO_Number_e gpioNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// read GPIO
return(GPIO_read(obj->gpioHandle,gpioNumber));
} // end of HAL_readGpio() function
//! \brief Toggles the GPIO pin
//! \details Takes in the enumeration GPIO_Number_e and toggles that GPIO
//! pin.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] gpioNumber The GPIO number
static inline void HAL_toggleGpio(HAL_Handle handle,const GPIO_Number_e gpioNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// set GPIO high
GPIO_toggle(obj->gpioHandle,gpioNumber);
return;
} // end of HAL_setGpioHigh() function
//! \brief Sets the GPIO pin low
//! \details Takes in the enumeration GPIO_Number_e and clears that GPIO
//! pin low.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] gpioNumber The GPIO number
static inline void HAL_setGpioLow(HAL_Handle handle,const GPIO_Number_e gpioNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// set GPIO low
GPIO_setLow(obj->gpioHandle,gpioNumber);
return;
} // end of HAL_setGpioLow() function
//! \brief Sets the current scale factor in the hardware abstraction layer
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] current_sf The current scale factor
static inline void HAL_setCurrentScaleFactor(HAL_Handle_mtr handleMtr,const _iq current_sf)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
objMtr->current_sf = current_sf;
return;
} // end of HAL_setCurrentScaleFactor() function
//! \brief Sets the number of current sensors
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] numCurrentSensors The number of current sensors
static inline void HAL_setNumCurrentSensors(HAL_Handle_mtr handleMtr,const uint_least8_t numCurrentSensors)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
objMtr->numCurrentSensors = numCurrentSensors;
return;
} // end of HAL_setNumCurrentSensors() function
//! \brief Sets the number of voltage sensors
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] numVoltageSensors The number of voltage sensors
static inline void HAL_setNumVoltageSensors(HAL_Handle_mtr handleMtr,const uint_least8_t numVoltageSensors)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
objMtr->numVoltageSensors = numVoltageSensors;
return;
} // end of HAL_setNumVoltageSensors() function
////! \brief Sets the value used to set the low pass filter pole for offset estimation
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \param[in] beta_lp_pu The value used to set the low pass filter pole, pu
//static inline void HAL_setOffsetBeta_lp_pu(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// const uint_least8_t sensorNumber,
// const _iq beta_lp_pu)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
// if(sensorType == HAL_SensorType_Current)
// {
// OFFSET_setBeta(obj->offsetHandle_I[sensorNumber],beta_lp_pu);
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// OFFSET_setBeta(obj->offsetHandle_V[sensorNumber],beta_lp_pu);
// }
//
// return;
//} // end of HAL_setOffsetBeta_lp_pu() function
//! \brief Sets the value used to set the low pass filter pole for offset estimation
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] sensorType The sensor type
//! \param[in] sensorNumber The sensor number
//! \param[in] beta_lp_pu The value used to set the low pass filter pole, pu
static inline void HAL_setOffsetBeta_lp_pu(HAL_Handle_mtr handleMtr,
const HAL_SensorType_e sensorType,
const uint_least8_t sensorNumber,
const _iq beta_lp_pu)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
if(sensorType == HAL_SensorType_Current)
{
OFFSET_setBeta(objMtr->offsetHandle_I[sensorNumber],beta_lp_pu);
}
else if(sensorType == HAL_SensorType_Voltage)
{
OFFSET_setBeta(objMtr->offsetHandle_V[sensorNumber],beta_lp_pu);
}
return;
} // end of HAL_setOffsetBeta_lp_pu() function
////! \brief Sets the offset initial condition value for offset estimation
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \param[in] initCond The initial condition value
//static inline void HAL_setOffsetInitCond(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// const uint_least8_t sensorNumber,
// const _iq initCond)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
// if(sensorType == HAL_SensorType_Current)
// {
// OFFSET_setInitCond(obj->offsetHandle_I[sensorNumber],initCond);
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// OFFSET_setInitCond(obj->offsetHandle_V[sensorNumber],initCond);
// }
//
// return;
//} // end of HAL_setOffsetInitCond() function
//! \brief Sets the offset initial condition value for offset estimation
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] sensorType The sensor type
//! \param[in] sensorNumber The sensor number
//! \param[in] initCond The initial condition value
static inline void HAL_setOffsetInitCond(HAL_Handle_mtr handleMtr,
const HAL_SensorType_e sensorType,
const uint_least8_t sensorNumber,
const _iq initCond)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
if(sensorType == HAL_SensorType_Current)
{
OFFSET_setInitCond(objMtr->offsetHandle_I[sensorNumber],initCond);
}
else if(sensorType == HAL_SensorType_Voltage)
{
OFFSET_setInitCond(objMtr->offsetHandle_V[sensorNumber],initCond);
}
return;
} // end of HAL_setOffsetInitCond() function
////! \brief Sets the initial offset value for offset estimation
////! \param[in] handle The hardware abstraction layer (HAL) handle
////! \param[in] sensorType The sensor type
////! \param[in] sensorNumber The sensor number
////! \param[in] value The initial offset value
//static inline void HAL_setOffsetValue(HAL_Handle handle,
// const HAL_SensorType_e sensorType,
// const uint_least8_t sensorNumber,
// const _iq value)
//{
// HAL_Obj *obj = (HAL_Obj *)handle;
//
// if(sensorType == HAL_SensorType_Current)
// {
// OFFSET_setOffset(obj->offsetHandle_I[sensorNumber],value);
// }
// else if(sensorType == HAL_SensorType_Voltage)
// {
// OFFSET_setOffset(obj->offsetHandle_V[sensorNumber],value);
// }
//
// return;
//} // end of HAL_setOffsetValue() function
//! \brief Sets the initial offset value for offset estimation
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] sensorType The sensor type
//! \param[in] sensorNumber The sensor number
//! \param[in] value The initial offset value
static inline void HAL_setOffsetValue(HAL_Handle_mtr handleMtr,
const HAL_SensorType_e sensorType,
const uint_least8_t sensorNumber,
const _iq value)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
if(sensorType == HAL_SensorType_Current)
{
OFFSET_setOffset(objMtr->offsetHandle_I[sensorNumber],value);
}
else if(sensorType == HAL_SensorType_Voltage)
{
OFFSET_setOffset(objMtr->offsetHandle_V[sensorNumber],value);
}
return;
} // end of HAL_setOffsetValue() function
//! \brief Sets the voltage scale factor in the hardware abstraction layer
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] voltage_sf The voltage scale factor
static inline void HAL_setVoltageScaleFactor(HAL_Handle_mtr handleMtr,const _iq voltage_sf)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
objMtr->voltage_sf = voltage_sf;
return;
} // end of HAL_setVoltageScaleFactor() function
//! \brief Sets the hardware abstraction layer parameters
//! \details Sets up the microcontroller peripherals. Creates all of the scale
//! factors for the ADC voltage and current conversions. Sets the initial
//! offset values for voltage and current measurements.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pUserParams The pointer to the user parameters
extern void HAL_setParams(HAL_Handle handle,const USER_Params *pUserParams);
//! \brief Sets the hardware abstraction layer individual motor parameters
//! \details Sets up the motor specific parameters. Creates all of the scale
//! factors for the ADC voltage and current conversions. Sets the initial
//! offset values for voltage and current measurements.
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pUserParams The pointer to the user parameters
//! \param[in] gpio The enable gpio number for the drv8301
void HAL_setParamsMtr(HAL_Handle_mtr handleMtr,HAL_Handle handle,const USER_Params *pUserParams);
void HAL_setParamsDualMtr(HAL_Handle_mtr handleMtr1, HAL_Handle_mtr handleMtr2, HAL_Handle handle, const USER_Params *pUserParams1, const USER_Params *pUserParams2);
//! \brief Sets up the ADCs (Analog to Digital Converters)
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupAdcs(HAL_Handle handle);
//! \brief Sets up the clocks
//! \details Sets up the micro-controller's main oscillator
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupClks(HAL_Handle handle);
//! \brief Sets up the FLASH.
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupFlash(HAL_Handle handle);
//! \brief Sets up the GPIO (General Purpose I/O) pins
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupGpios(HAL_Handle handle);
//! \brief Sets up the peripheral clocks
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupPeripheralClks(HAL_Handle handle);
//! \brief Sets up the PIE (Peripheral Interrupt Expansion)
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupPie(HAL_Handle handle);
//! \brief Sets up the PLL (Phase Lock Loop)
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] clkFreq The clock frequency
extern void HAL_setupPll(HAL_Handle handle,const PLL_ClkFreq_e clkFreq);
//! \brief Sets up the PWMs (Pulse Width Modulators)
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] systemFreq_MHz The system frequency, MHz
//! \param[in] pwmPeriod_usec The PWM period, usec
//! \param[in] numPwmTicksPerIsrTick The number of PWM clock ticks per ISR clock tick
void HAL_setupPwms(HAL_Handle_mtr,HAL_Handle,const USER_Params *);
void HAL_setupDualPwms(HAL_Handle_mtr handleMtr1, HAL_Handle_mtr handleMtr2, HAL_Handle handle, const USER_Params *pUserParams1, const USER_Params *pUserParams2);
//! \brief Sets up the PWM DACs (Pulse Width Modulator Digital to Analof Converters)
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupPwmDacs(HAL_Handle handle);
//! \brief Sets up the QEP peripheral
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupQEP(HAL_Handle_mtr handleMtr, float_t encoderLines);
//! \brief Sets up the spiA peripheral
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupSpiA(HAL_Handle handle);
//! \brief Sets up the spiB peripheral
//! \param[in] handle The hardware abstraction layer (HAL) handle
extern void HAL_setupSpiB(HAL_Handle handle);
//! \brief Sets up the timers
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] systemFreq_MHz The system frequency, MHz
void HAL_setupTimers(HAL_Handle handle,const float_t systemFreq_MHz);
////! \brief Updates the ADC bias values
////! \details This function is called before the motor is started. It sets the voltage
////! and current measurement offsets.
////! \param[in] handle The hardware abstraction layer (HAL) handle
//static inline void HAL_updateAdcBias(HAL_Handle handle)
//{
// uint_least8_t cnt;
// HAL_Obj *obj = (HAL_Obj *)handle;
// _iq bias;
//
//
// // update the current bias
// for(cnt=0;cnt<HAL_getNumCurrentSensors(handle);cnt++)
// {
// bias = HAL_getBias(handle,HAL_SensorType_Current,cnt);
//
// bias += OFFSET_getOffset(obj->offsetHandle_I[cnt]);
//
// HAL_setBias(handle,HAL_SensorType_Current,cnt,bias);
// }
//
//
// // update the voltage bias
// for(cnt=0;cnt<HAL_getNumVoltageSensors(handle);cnt++)
// {
// bias = HAL_getBias(handle,HAL_SensorType_Voltage,cnt);
//
// bias += OFFSET_getOffset(obj->offsetHandle_V[cnt]);
//
// HAL_setBias(handle,HAL_SensorType_Voltage,cnt,bias);
// }
//
// return;
//} // end of HAL_updateAdcBias() function
//! \brief Updates the ADC bias values
//! \details This function is called before the motor is started. It sets the voltage
//! and current measurement offsets.
//! \param[in] handle The hardware abstraction layer (HAL) handle
static inline void HAL_updateAdcBias(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
uint_least8_t cnt;
_iq bias;
// update the current bias
for(cnt=0;cnt<HAL_getNumCurrentSensors(handleMtr);cnt++)
{
bias = HAL_getBias(handleMtr,HAL_SensorType_Current,cnt);
bias += OFFSET_getOffset(objMtr->offsetHandle_I[cnt]);
HAL_setBias(handleMtr,HAL_SensorType_Current,cnt,bias);
}
// update the voltage bias
for(cnt=0;cnt<HAL_getNumVoltageSensors(handleMtr);cnt++)
{
bias = HAL_getBias(handleMtr,HAL_SensorType_Voltage,cnt);
bias += OFFSET_getOffset(objMtr->offsetHandle_V[cnt]);
HAL_setBias(handleMtr,HAL_SensorType_Voltage,cnt,bias);
}
return;
} // end of HAL_updateAdcBias() function
//! \brief Writes DAC data to the PWM comparators for DAC (digital-to-analog conversion) output
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pDacData The pointer to the DAC data
void HAL_setDacParameters(HAL_Handle handle, HAL_DacData_t *pDacData);
//! \brief Writes DAC data to the PWM comparators for DAC (digital-to-analog conversion) output
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pDacData The pointer to the DAC data
static inline void HAL_writeDacData(HAL_Handle handle,HAL_DacData_t *pDacData)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// convert values from _IQ to _IQ15
uint_least8_t cnt;
_iq period;
_iq dacData_sat_dc;
_iq value;
uint16_t cmpValue[4];
period = (_iq)pDacData->PeriodMax;
for(cnt=0;cnt<4;cnt++)
{
dacData_sat_dc = _IQmpy(pDacData->value[cnt], pDacData->gain[cnt]) + pDacData->offset[cnt];
value = _IQmpy(dacData_sat_dc, period);
cmpValue[cnt] = (uint16_t)_IQsat(value, period, 0);
}
// write the DAC data
if(obj->pwmDacHandle[PWMDAC_Number_1])
{
PWMDAC_write_CmpA(obj->pwmDacHandle[PWMDAC_Number_1], cmpValue[0]);
PWMDAC_write_CmpB(obj->pwmDacHandle[PWMDAC_Number_1], cmpValue[1]);
}
if(obj->pwmDacHandle[PWMDAC_Number_2])
{
PWMDAC_write_CmpA(obj->pwmDacHandle[PWMDAC_Number_2], cmpValue[2]);
PWMDAC_write_CmpB(obj->pwmDacHandle[PWMDAC_Number_2], cmpValue[3]);
}
return;
} // end of HAL_writeDacData() function
//! \brief Writes PWM data to the PWM comparators for motor control
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pPwmData The pointer to the PWM data
static inline void HAL_writePwmData(HAL_Handle_mtr handle,HAL_PwmData_t *pPwmData)
{
uint_least8_t cnt;
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handle;
PWM_Obj *pwm;
_iq period;
_iq pwmData_neg;
_iq pwmData_sat;
_iq pwmData_sat_dc;
_iq value;
uint16_t value_sat;
for(cnt=0;cnt<3;cnt++)
{
pwm = (PWM_Obj *)objMtr->pwmHandle[cnt];
period = (_iq)pwm->TBPRD;
pwmData_neg = _IQmpy(pPwmData->Tabc.value[cnt],_IQ(-1.0));
pwmData_sat = _IQsat(pwmData_neg,_IQ(0.5),_IQ(-0.5));
pwmData_sat_dc = pwmData_sat + _IQ(0.5);
value = _IQmpy(pwmData_sat_dc, period);
value_sat = (uint16_t)_IQsat(value, period, _IQ(0.0));
// write the PWM data
PWM_write_CmpA(objMtr->pwmHandle[cnt],value_sat);
}
return;
} // end of HAL_writePwmData() function
//! \brief Reads PWM compare register A
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pwmNumber The PWM number
//! \return The PWM compare value
static inline uint16_t HAL_readPwmCmpA(HAL_Handle_mtr handle,const PWM_Number_e pwmNumber)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handle;
// the compare value to be returned
uint16_t pwmValue;
pwmValue = PWM_get_CmpA(objMtr->pwmHandle[pwmNumber]);
return(pwmValue);
} // end of HAL_readPwmCmpA() function
//! \brief Reads PWM compare mirror register A
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pwmNumber The PWM number
//! \return The PWM compare value
static inline uint16_t HAL_readPwmCmpAM(HAL_Handle_mtr handle,const PWM_Number_e pwmNumber)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handle;
// the compare value to be returned
uint16_t pwmValue;
pwmValue = PWM_get_CmpAM(objMtr->pwmHandle[pwmNumber]);
return(pwmValue);
} // end of HAL_readPwmCmpAM() function
//! \brief Reads PWM compare register B
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pwmNumber The PWM number
//! \return The PWM compare value
static inline uint16_t HAL_readPwmCmpB(HAL_Handle_mtr handle,const PWM_Number_e pwmNumber)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handle;
// the compare value to be returned
uint16_t pwmValue;
pwmValue = PWM_get_CmpB(objMtr->pwmHandle[pwmNumber]);
return(pwmValue);
} // end of HAL_readPwmCmpB() function
//! \brief Reads PWM period register
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] pwmNumber The PWM number
//! \return The PWM period value
static inline uint16_t HAL_readPwmPeriod(HAL_Handle_mtr handle,const PWM_Number_e pwmNumber)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handle;
// the period value to be returned
uint16_t pwmPeriodValue;
pwmPeriodValue = PWM_getPeriod(objMtr->pwmHandle[pwmNumber]);
return(pwmPeriodValue);
} // end of HAL_readPwmPeriod() function
//! \brief Set trigger point in the middle of the low side pulse
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] ignoreShunt The low side shunt that should be ignored
//! \param[in] midVolShunt The middle length of output voltage
static inline void HAL_setTrigger(HAL_Handle_mtr handleMtr,const SVGENCURRENT_IgnoreShunt_e ignoreShunt,
const SVGENCURRENT_VmidShunt_e midVolShunt)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
PWM_Obj *pwm1 = (PWM_Obj *)objMtr->pwmHandle[PWM_Number_1];
PWM_Obj *pwm2 = (PWM_Obj *)objMtr->pwmHandle[PWM_Number_2];
PWM_Obj *pwm3 = (PWM_Obj *)objMtr->pwmHandle[PWM_Number_3];
PWM_Obj *pwm;
uint16_t nextPulse1 = (pwm1->CMPA + pwm1->CMPAM) / 2;
uint16_t nextPulse2 = (pwm2->CMPA + pwm2->CMPAM) / 2;
uint16_t nextPulse3 = (pwm3->CMPA + pwm3->CMPAM) / 2;
uint16_t pwmCMPA1 = pwm1->CMPA;
uint16_t pwmCMPA2 = pwm2->CMPA;
uint16_t pwmCMPA3 = pwm3->CMPA;
if(ignoreShunt == use_all)
{
if((nextPulse1 <= nextPulse2) && (nextPulse1 <= nextPulse3))
{
pwm = pwm1;
}
else if((nextPulse2 <= nextPulse1) && (nextPulse2 <= nextPulse3))
{
pwm = pwm2;
}
else
{
pwm = pwm3;
}
}
else
{
if(midVolShunt == Vmid_a)
{
pwm = pwm1;
}
else if(midVolShunt == Vmid_b)
{
pwm = pwm2;
}
else
{
pwm = pwm3;
}
}
pwmCMPA1 = pwm->CMPA;
pwmCMPA2 = pwm->CMPAM;
if(pwmCMPA2 >= (pwmCMPA1 + pwm->DBFED))
{
pwmCMPA3 = (pwmCMPA2 - (pwmCMPA1 + pwm->DBFED)) / 2 + 1;
if(pwmCMPA3 < (pwm1->TBPRD>>1))
{
pwm1->CMPB = pwmCMPA3;
}
else
{
pwm1->CMPB = (pwm1->TBPRD>>1);
}
PWM_setSocAPulseSrc(objMtr->pwmHandle[PWM_Number_1],PWM_SocPulseSrc_CounterEqualCmpBDecr);
}
else
{
pwmCMPA3 = ((pwmCMPA1 + pwm->DBFED) - pwmCMPA2 ) / 2 + 1;
if(pwmCMPA3 < (pwm1->TBPRD>>1))
{
pwm1->CMPB = pwmCMPA3;
}
else
{
pwm1->CMPB = (pwm1->TBPRD>>1);
}
PWM_setSocAPulseSrc(objMtr->pwmHandle[PWM_Number_1],PWM_SocPulseSrc_CounterEqualCmpBIncr);
}
return;
} // end of HAL_setTrigger() function
#ifdef QEP
//! \brief Returns the current position count from QEP
//! \param[in] handleMtr The hardware abstraction layer (HAL) handle for a specific motor
//! \return the current position count from QEP
static inline uint32_t HAL_getQepPosnCounts(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
QEP_Obj *qep = (QEP_Obj *)objMtr->qepHandle;
return qep->QPOSCNT;
}
//! \brief Returns the maximum position count from QEP
//! \param[in] handleMtr The hardware abstraction layer (HAL) handle for a specific motor
//! \return the maximum position count from QEP
static inline uint32_t HAL_getQepPosnMaximum(HAL_Handle_mtr handleMtr)
{
HAL_Obj_mtr *objMtr = (HAL_Obj_mtr *)handleMtr;
QEP_Obj *qep = (QEP_Obj *)objMtr->qepHandle;
return qep->QPOSMAX;
}
#endif
//! \brief Selects the analog channel used for calibration
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] chanNumber The channel number
void HAL_AdcCalChanSelect(HAL_Handle handle, const ADC_SocChanNumber_e chanNumber);
//! \brief Reads the converted value from the selected calibration channel
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \return The converted value
uint16_t HAL_AdcCalConversion(HAL_Handle handle);
//! \brief Executes the offset calibration of the ADC
//! \param[in] handle The hardware abstraction layer (HAL) handle
void HAL_AdcOffsetSelfCal(HAL_Handle handle);
//! \brief Converts coarse and fine oscillator trim values into a single 16bit word value
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] coarse The coarse trim portion of the oscillator trim
//! \param[in] fine The fine trim portion of the oscillator trim
//! \return The combined trim value
uint16_t HAL_getOscTrimValue(int16_t coarse, int16_t fine);
//! \brief Executes the oscillator 1 and 2 calibration functions
//! \param[in] handle The hardware abstraction layer (HAL) handle
void HAL_OscTempComp(HAL_Handle handle);
//! \brief Executes the oscillator 1 calibration based on input sample
//! \param[in] handle The hardware abstraction layer (HAL) handle
void HAL_osc1Comp(HAL_Handle handle, const int16_t sensorSample);
//! \brief Executes the oscillator 2 calibration based on input sample
//! \param[in] handle The hardware abstraction layer (HAL) handle
void HAL_osc2Comp(HAL_Handle handle, const int16_t sensorSample);
//! \brief Writes data to the driver
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] Spi_8301_Vars SPI variables
void HAL_writeDrvData(HAL_Handle_mtr handle, DRV_SPI_8301_Vars_t *Spi_8301_Vars);
//! \brief Reads data from the driver
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] Spi_8301_Vars SPI variables
void HAL_readDrvData(HAL_Handle_mtr handle, DRV_SPI_8301_Vars_t *Spi_8301_Vars);
//! \brief Sets up the SPI interface for the driver
//! \param[in] handle The hardware abstraction layer (HAL) handle
//! \param[in] Spi_8301_Vars SPI variables
void HAL_setupDrvSpi(HAL_Handle_mtr handle, DRV_SPI_8301_Vars_t *Spi_8301_Vars);
#ifdef __cplusplus
}
#endif // extern "C"
//@} // ingroup
#endif // end of _HAL_H_ definition
SCI.c
/* --COPYRIGHT--,BSD
* Copyright (c) 2015, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file drivers/sci/src/32b/f28x/f2806x/sci.c
//! \brief Contains the various functions related to the
//! serial communications interface (SCI) object
//!
//! (C) Copyright 2015, Texas Instruments, Inc.
// **************************************************************************
// the includes
#include "sw/drivers/sci/src/32b/f28x/f2806x/sci.h"
// **************************************************************************
// the defines
// **************************************************************************
// the globals
// **************************************************************************
// the functions
void SCI_clearAutoBaudDetect(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFCT |= SCI_SCIFFCT_ABDCLR_BITS;
return;
} // end of SCI_clearAutoBaudDetect() function
void SCI_clearRxFifoOvf(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_FIFO_OVFCLR_BITS;
return;
} // end of SCI_clearRxFifoOvf() function
void SCI_clearRxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_INTCLR_BITS;
return;
} // end of SCI_clearRxFifoInt() function
void SCI_clearTxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_INTCLR_BITS;
return;
} // end of SCI_clearTxFifoInt() function
void SCI_disable(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RESET_BITS);
return;
} // end of SCI_disable() function
void SCI_disableAutoBaudAlign(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFCT &= (~SCI_SCIFFCT_CDC_BITS);
return;
} // end of SCI_disableAutoBaudAlign() function
void SCI_disableLoopBack(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_LB_ENA_BITS);
return;
} // end of SCI_disableLoopBack() function
void SCI_disableParity(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_PARITY_ENA_BITS);
return;
} // end of SCI_disableParity() function
void SCI_disableRx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RXENA_BITS);
return;
} // end of SCI_disableRx() function
void SCI_disableRxErrorInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RX_ERR_INT_ENA_BITS);
return;
} // end of SCI_disableRxErrorInt() function
void SCI_disableRxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFRX &= (~SCI_SCIFFRX_IENA_BITS);
return;
} // end of SCI_disableRxFifoInt() function
void SCI_disableRxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL2 &= (~SCI_SCICTL2_RX_INT_ENA_BITS);
return;
} // end of SCI_disableRxInt() function
void SCI_disableSleep(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_SLEEP_BITS);
return;
} // end of SCI_disableSleep() function
void SCI_disableTx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_TXENA_BITS);
return;
} // end of SCI_disableTx() function
void SCI_disableTxFifoEnh(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_FIFO_ENA_BITS);
return;
} // end of SCI_disableTxFifo() function
void SCI_disableTxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_IENA_BITS);
return;
} // end of SCI_disableTxFifoInt() function
void SCI_disableTxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL2 &= (~SCI_SCICTL2_TX_INT_ENA_BITS);
return;
} // end of SCI_disableTxInt() function
void SCI_disableTxWake(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_TXWAKE_BITS);
return;
} // end of SCI_disableTxWake() function
void SCI_enable(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_RESET_BITS;
return;
} // end of SCI_enable() function
void SCI_enableAutoBaudAlign(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFCT |= SCI_SCIFFCT_CDC_BITS;
return;
} // end of SCI_enableAutoBaudAlign() function
void SCI_enableChannels(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= (uint16_t)SCI_SCIFFTX_CHAN_RESET_BITS;
return;
} // SCI_enableChannels() function
void SCI_enableLoopBack(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICCR |= SCI_SCICCR_LB_ENA_BITS;
return;
} // end of SCI_enableLoopBack() function
void SCI_enableParity(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICCR |= SCI_SCICCR_PARITY_ENA_BITS;
return;
} // end of SCI_enableParity() function
void SCI_enableRx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_RXENA_BITS;
return;
} // end of SCI_enableRx() function
void SCI_enableRxErrorInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_RX_ERR_INT_ENA_BITS;
return;
} // end of SCI_enableRxErrorInt() function
void SCI_enableRxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL2 |= SCI_SCICTL2_RX_INT_ENA_BITS;
return;
} // end of SCI_enableRxInt() function
void SCI_enableSleep(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_SLEEP_BITS;
return;
} // end of SCI_enableSleep() function
void SCI_enableRxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_FIFO_RESET_BITS;
return;
} // end of SCI_enableRxFifo() function
void SCI_enableRxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_IENA_BITS;
return;
} // end of SCI_enableRxFifoInt() function
void SCI_enableTx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_TXENA_BITS;
return;
} // end of SCI_enableTx() function
void SCI_enableTxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_FIFO_RESET_BITS;
return;
} // end of SCI_enableTxFifo() function
void SCI_enableTxFifoEnh(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_FIFO_ENA_BITS;
return;
} // end of SCI_enableTxFifo() function
void SCI_enableTxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_IENA_BITS;
return;
} // end of SCI_enableTxFifoInt() function
void SCI_enableTxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL2 |= SCI_SCICTL2_TX_INT_ENA_BITS;
return;
} // end of SCI_enableTxInt() function
void SCI_enableTxWake(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_TXWAKE_BITS;
return;
} // end of SCI_enableTxWake() function
uint16_t SCI_getDataBlocking(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
while(SCI_rxDataReady(sciHandle) != true)
{
}
return(sci->SCIRXBUF);
} // end of SCI_getDataBlocking() function
uint16_t SCI_getDataNonBlocking(SCI_Handle sciHandle, uint16_t * success)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
if(SCI_rxDataReady(sciHandle))
{
*success = true;
return(sci->SCIRXBUF);
}
*success = false;
return(NULL);
} // end of SCI_getDataNonBlocking() function
SCI_FifoStatus_e SCI_getRxFifoStatus(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
SCI_FifoStatus_e status;
// get the status
status = (SCI_FifoStatus_e)(sci->SCIFFRX & SCI_SCIFFRX_FIFO_ST_BITS);
return(status);
} // SCI_getRxFifoStatus() function
SCI_FifoStatus_e SCI_getTxFifoStatus(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
SCI_FifoStatus_e status;
// get the status
status = (SCI_FifoStatus_e)(sci->SCIFFTX & SCI_SCIFFTX_FIFO_ST_BITS);
return(status);
} // SCI_getTxFifoStatus() function
SCI_Handle SCI_init(void *pMemory,const size_t numBytes)
{
SCI_Handle sciHandle;
if(numBytes < sizeof(SCI_Obj))
return((SCI_Handle)NULL);
// assign the handle
sciHandle = (SCI_Handle)pMemory;
return(sciHandle);
} // end of SCI_init() function
void SCI_putDataBlocking(SCI_Handle sciHandle, uint16_t data)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
while(SCI_txReady(sciHandle) != true)
{
}
// write the data
sci->SCITXBUF = data;
return;
} // end of SCI_putDataBlocking() function
uint16_t SCI_putDataNonBlocking(SCI_Handle sciHandle, uint16_t data)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
if(SCI_txReady(sciHandle))
{
// write the data
sci->SCITXBUF = data;
return(true);
}
return(false);
} // end of SCI_putDataNonBlocking() function
void SCI_reset(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RESET_BITS);
return;
} // end of SCI_reset() function
void SCI_resetChannels(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_CHAN_RESET_BITS);
asm(" nop");
sci->SCIFFTX |= (uint16_t)(SCI_SCIFFTX_CHAN_RESET_BITS);
return;
} // SCI_resetChannels() function
void SCI_resetRxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFRX &= (~SCI_SCIFFRX_FIFO_RESET_BITS);
asm(" nop");
sci->SCIFFRX |= SCI_SCIFFRX_FIFO_RESET_BITS;
return;
} // end of SCI_resetRxFifo() function
void SCI_resetTxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_FIFO_RESET_BITS);
asm(" nop");
sci->SCIFFTX |= SCI_SCIFFTX_FIFO_RESET_BITS;
return;
} // end of SCI_resetTxFifo() function
void SCI_setBaudRate(SCI_Handle sciHandle,const SCI_BaudRate_e baudRate)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIHBAUD = ((uint16_t)baudRate >> 8);
sci->SCILBAUD = baudRate & 0xFF;
return;
} // end of SCI_setBaudRate() function
void SCI_setCharLength(SCI_Handle sciHandle,const SCI_CharLength_e charLength)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_CHAR_LENGTH_BITS);
// set the bits
sci->SCICCR |= charLength;
return;
} // SCI_setCharLength() function
void SCI_setMode(SCI_Handle sciHandle,const SCI_Mode_e mode)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_MODE_BITS);
// set the bits
sci->SCICCR |= mode;
return;
} // SCI_setMode() function
void SCI_setNumStopBits(SCI_Handle sciHandle,const SCI_NumStopBits_e numBits)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_STOP_BITS);
// set the bits
sci->SCICCR |= numBits;
return;
} // SCI_setNumStopBits() function
void SCI_setPriority(SCI_Handle sciHandle,const SCI_Priority_e priority)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIPRI = priority;
return;
} // SCI_setPriority() function
void SCI_setParity(SCI_Handle sciHandle,const SCI_Parity_e parity)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_PARITY_BITS);
// set the bits
sci->SCICCR |= parity;
return;
} // SCI_setParity() function
void SCI_setTxDelay(SCI_Handle sciHandle,const uint_least8_t delay)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFCT &= (~SCI_SCIFFCT_DELAY_BITS);
// set the bits
sci->SCIFFCT |= delay;
return;
} // end of SCI_setTxDelay() function
void SCI_setRxFifoIntLevel(SCI_Handle sciHandle, const SCI_FifoLevel_e fifoLevel)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the value
sci->SCIFFRX &= (~SCI_SCIFFRX_IL_BITS);
// set the bits
sci->SCIFFRX |= fifoLevel;
return;
} // end of SCI_setRxFifoIntLevel() function
void SCI_setTxFifoIntLevel(SCI_Handle sciHandle,const SCI_FifoLevel_e fifoLevel)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the value
sci->SCIFFTX &= (~SCI_SCIFFTX_IL_BITS);
// set the bits
sci->SCIFFTX |= fifoLevel;
return;
} // end of SCI_setTxFifoIntLevel() function
// end of file
gpio.h
/* --COPYRIGHT--,BSD
* Copyright (c) 2015, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
#ifndef _GPIO_H_
#define _GPIO_H_
//! \file drivers/gpio/src/32b/f28x/f2806x/gpio.h
//! \brief Contains public interface to general purpose I/O (GPIO) methods
//!
//! (C) Copyright 2015, Texas Instruments, Inc.
// **************************************************************************
// the includes
#include "sw/modules/types/src/types.h"
#include "sw/drivers/cpu/src/32b/f28x/f2806x/cpu.h"
//!
//!
//! \defgroup GPIO GPIO
//!
//@{
#ifdef __cplusplus
extern "C" {
#endif
// **************************************************************************
// the defines
//! \brief Defines the base address of the general purpose I/O (GPIO) registers
//!
#define GPIO_BASE_ADDR (0x00006F80)
//! \brief Defines the location of the CONFIG bits in the GPMUX register
//!
#define GPIO_GPMUX_CONFIG_BITS (3 << 0)
//! \brief Defines number of GPIOs covered by each GPxMUX register
//!
#define GPIO_GPMUX_NUMGPIOS_PER_REG 16
//! \brief Defines the location of the GPIOx bits in the GPxQSELy register
//!
#define GPIO_GPxQSELy_GPIOx_BITS 3
//! \brief Defines number of GPIOs covered by each GPxQSELy register
//!
#define GPIO_GPxQSELx_NUMGPIOS_PER_REG 16
//! \brief Defines the location of the GPIOx bits in the GPxQSELy register
//!
#define GPIO_GPxCTRL_QUALPRDx_BITS 0xFF
//! \brief Defines number of bits per QUALPRDx field per GPxCTRL register
//!
#define GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG 8
// **************************************************************************
// the typedefs
//! \brief Enumeration to define the general purpose I/O (GPIO) modes for each pin
//!
typedef enum
{
GPIO_0_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_0_Mode_EPWM1A, //!< Denotes a EPWM1A function
GPIO_0_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_0_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_1_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_1_Mode_EPWM1B, //!< Denotes a EPWM1B function
GPIO_1_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_1_Mode_COMP1OUT, //!< Denotes a COMP1OUT function
GPIO_2_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_2_Mode_EPWM2A, //!< Denotes a EPWM2A function
GPIO_2_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_2_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_3_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_3_Mode_EPWM2B, //!< Denotes a EPWM2B function
GPIO_3_Mode_SPISOMIA, //!< Denotes a SPISOMIA function
GPIO_3_Mode_COMP2OUT, //!< Denotes a COMP2OUT function
GPIO_4_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_4_Mode_EPWM3A, //!< Denotes a EPWM3A function
GPIO_4_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_4_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_5_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_5_Mode_EPWM3B, //!< Denotes a EPWM3B function
GPIO_5_Mode_SPISIMOA, //!< Denotes a SPISOMIA function
GPIO_5_Mode_ECAP1, //!< Denotes a ECAP1 function
GPIO_6_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_6_Mode_EPWM4A, //!< Denotes a EPWM4A function
GPIO_6_Mode_EPWMSYNCI, //!< Denotes a EPWMSYNCI function
GPIO_6_Mode_EPWMSYNCO, //!< Denotes a EPWMSYNCO function
GPIO_7_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_7_Mode_EPWM4B, //!< Denotes a EPWM4B function
GPIO_7_Mode_SCIRXDA, //!< Denotes a SCIRXDA function
GPIO_7_Mode_ECAP2, //!< Denotes a ECAP2 function
GPIO_8_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_8_Mode_EPWM5A, //!< Denotes a EPWM5A function
GPIO_8_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_8_Mode_ADCSOCAO_NOT, //!< Denotes a ADCSICAO_NOT function
GPIO_9_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_9_Mode_EPWM5B, //!< Denotes a EPWM5B function
GPIO_9_Mode_SCITXDB, //!< Denotes a SCITXDB function
GPIO_9_Mode_ECAP3, //!< Denotes a ECAP3 function
GPIO_10_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_10_Mode_EPWM6A, //!< Denotes a EPWM6A function
GPIO_10_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_10_Mode_ADCSOCBO_NOT, //!< Denotes a ADCSOCBO_NOT function
GPIO_11_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_11_Mode_EPWM6B, //!< Denotes a EPWM6B function
GPIO_11_Mode_SCIRXDB, //!< Denotes a SCIRXDB function
GPIO_11_Mode_ECAP1, //!< Denotes a ECAP1 function
GPIO_12_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_12_Mode_TZ1_NOT, //!< Denotes a TZ1_NOT function
GPIO_12_Mode_SCITXDA, //!< Denotes a SCITXDA function
GPIO_12_Mode_SPISIMOB, //!< Denotes a SPISIMOB function
GPIO_13_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_13_Mode_TZ2_NOT, //!< Denotes a TZ2_NOT function
GPIO_13_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_13_Mode_SPISOMIB, //!< Denotes a SPISOMIB function
GPIO_14_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_14_Mode_TZ3_NOT, //!< Denotes a TZ3_NOT function
GPIO_14_Mode_SCITXDB, //!< Denotes a SCITXDB function
GPIO_14_Mode_SPICLKB, //!< Denotes a SPICLKB function
GPIO_15_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_15_Mode_ECAP2, //!< Denotes a ECAP2 function
GPIO_15_Mode_SCIRXDB, //!< Denotes a SCIRXDB function
GPIO_15_Mode_SPISTEB_NOT, //!< Denotes a SPISTEB_NOT function
GPIO_16_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_16_Mode_SPISIMOA, //!< Denotes a SPISIMOA function
GPIO_16_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_16_Mode_TZ2_NOT, //!< Denotes a TZ2_NOT function
GPIO_17_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_17_Mode_SPISOMIA, //!< Denotes a SPISOMIA function
GPIO_17_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_17_Mode_TZ3_NOT, //!< Denotes a TZ3_NOT function
GPIO_18_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_18_Mode_SPICLKA, //!< Denotes a SPICLKA function
GPIO_18_Mode_SCITXDB, //!< Denotes a SCITXDB function
GPIO_18_Mode_XCLKOUT, //!< Denotes a XCLKOUT function
GPIO_19_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_19_Mode_SPISTEA_NOT, //!< Denotes a SPISTEA_NOT function
GPIO_19_Mode_SCIRXDB, //!< Denotes a SCIRXDB function
GPIO_19_Mode_ECAP1, //!< Denotes a ECAP1 function
GPIO_20_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_20_Mode_EQEP1A, //!< Denotes a EQEP1A function
GPIO_20_Mode_MDXA, //!< Denotes a MDXA function
GPIO_20_Mode_COMP1OUT, //!< Denotes a COMP1OUT function
GPIO_21_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_21_Mode_EQEP1B, //!< Denotes a EQEP1B function
GPIO_21_Mode_MDRA, //!< Denotes a MDRA function
GPIO_21_Mode_COMP2OUT, //!< Denotes a COMP2OUT function
GPIO_22_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_22_Mode_EQEP1S, //!< Denotes a EQEP1S function
GPIO_22_Mode_MCLKXA, //!< Denotes a MCLKXA function
GPIO_22_Mode_SCITXDB, //!< Denotes a SCITXDB function
GPIO_23_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_23_Mode_EQEP1I, //!< Denotes a EQEP1I function
GPIO_23_Mode_MFSXA, //!< Denotes a MFSXA function
GPIO_23_Mode_SCIRXDB, //!< Denotes a SCIRXDB function
GPIO_24_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_24_Mode_ECAP1, //!< Denotes a ECAP1 function
GPIO_24_Mode_EQEP2A, //!< Denotes a EQEP2A function
GPIO_24_Mode_SPISIMOB, //!< Denotes a SPISIMOB function
GPIO_25_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_25_Mode_ECAP2, //!< Denotes a ECAP2 function
GPIO_25_Mode_EQEP2B, //!< Denotes a EQEP2B function
GPIO_25_Mode_SPISOMIB, //!< Denotes a SPISOMIB function
GPIO_26_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_26_Mode_ECAP3, //!< Denotes a ECAP3 function
GPIO_26_Mode_EQEP2I, //!< Denotes a EQEP2I function
GPIO_26_Mode_SPICLKB, //!< Denotes a SPICLKB function
GPIO_27_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_27_Mode_HRCAP2, //!< Denotes a HRCAP2 function
GPIO_27_Mode_EQEP2S, //!< Denotes a EQEP2S function
GPIO_27_Mode_SPISTEB_NOT, //!< Denotes a SPISTEB function
GPIO_28_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_28_Mode_SCIRXDA, //!< Denotes a SCIRXDA function
GPIO_28_Mode_SDDA, //!< Denotes a SDDA function
GPIO_28_Mode_TZ2_NOT, //!< Denotes a TZ2_NOT function
GPIO_29_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_29_Mode_SCITXDA, //!< Denotes a SCITXDA function
GPIO_29_Mode_SCLA, //!< Denotes a SCLA function
GPIO_29_Mode_TZ3_NOT, //!< Denotes a TZ3_NOT function
GPIO_30_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_30_Mode_CANRXA, //!< Denotes a CANRXA function
GPIO_30_Mode_EQEP2I, //!< Denotes a EQEP2I function
GPIO_30_Mode_EPWM7A, //!< Denotes a EPWM7A function
GPIO_31_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_31_Mode_CANTXA, //!< Denotes a CANTXA function
GPIO_31_Mode_EQEP2S, //!< Denotes a EQEP2S function
GPIO_31_Mode_EPWM8A, //!< Denotes a EPWM8A function
GPIO_32_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_32_Mode_SDAA, //!< Denotes a SDDA function
GPIO_32_Mode_EPWMSYNCI, //!< Denotes a EPWMSYNCI function
GPIO_32_Mode_ADCSOCAO_NOT, //!< Denotes a ADCSOCAO_NOT function
GPIO_33_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_33_Mode_SCLA, //!< Denotes a SCLA function
GPIO_33_Mode_EPWMSYNCO, //!< Denotes a EPWMSYNCO function
GPIO_33_Mode_ADCSOCBO_NOT, //!< Denotes a ADCSOCBO_NOT function
GPIO_34_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_34_Mode_COMP2OUT, //!< Denotes a COMP2OUT function
GPIO_34_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_34_Mode_COMP3OUT, //!< Denotes a COMP3OUT function
GPIO_35_Mode_JTAG_TDI=0, //!< Denotes a JTAG_TDI function
GPIO_35_Mode_Rsvd_1, //!< Denotes a reserved function
GPIO_35_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_35_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_36_Mode_JTAG_TMS=0, //!< Denotes a JTAG_TMS function
GPIO_36_Mode_Rsvd_1, //!< Denotes a reserved function
GPIO_36_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_36_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_37_Mode_JTAG_TDO=0, //!< Denotes a JTAG_TDO function
GPIO_37_Mode_Rsvd_1, //!< Denotes a reserved function
GPIO_37_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_37_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_38_Mode_JTAG_TCK=0, //!< Denotes a JTAG_TCK function
GPIO_38_Mode_Rsvd_1, //!< Denotes a reserved function
GPIO_38_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_38_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_39_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_39_Mode_Rsvd_1, //!< Denotes a reserved function
GPIO_39_Mode_Rsvd_2, //!< Denotes a reserved function
GPIO_39_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_40_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_40_Mode_EPWM7A, //!< Denotes a EPWM7A function
GPIO_40_Mode_SCITXDB, //!< Denotes a SCITXDB function
GPIO_40_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_41_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_41_Mode_EPWM7B, //!< Denotes a EPWM7B function
GPIO_41_Mode_SCIRXDB, //!< Denotes a SCIRXDB function
GPIO_41_Mode_Rsvd_3, //!< Denotes a reserved function
GPIO_42_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_42_Mode_EPWM8A, //!< Denotes a EPWM8A function
GPIO_42_Mode_TZ1_NOT, //!< Denotes a TZ1_NOT function
GPIO_42_Mode_COMP1OUT, //!< Denotes a COMP1OUT function
GPIO_43_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_43_Mode_EPWM8B, //!< Denotes a EPWM8B function
GPIO_43_Mode_TZ2_NOT, //!< Denotes a TZ2_NOT function
GPIO_43_Mode_COMP2OUT, //!< Denotes a COMP2OUT function
GPIO_44_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_44_Mode_MFSRA, //!< Denotes a MFSRA function
GPIO_44_Mode_SCIRXDB, //!< Denotes a SCIRXDB function
GPIO_44_Mode_EPWM7B, //!< Denotes a EPWM7B function
GPIO_50_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_50_Mode_EQEP1A, //!< Denotes a EQEP1A function
GPIO_50_Mode_MDXA, //!< Denotes a MDXA function
GPIO_50_Mode_TZ1_NOT, //!< Denotes a TZ1_NOT function
GPIO_51_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_51_Mode_EQEP1B, //!< Denotes a EQEP1B function
GPIO_51_Mode_MDRA, //!< Denotes a MDRA function
GPIO_51_Mode_TZ2_NOT, //!< Denotes a TZ2_NOT function
GPIO_52_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_52_Mode_EQEP1S, //!< Denotes a EQEP1S function
GPIO_52_Mode_MCLKXA, //!< Denotes a MCLKXA function
GPIO_52_Mode_TZ3_NOT, //!< Denotes a TZ3_NOT function
GPIO_53_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_53_Mode_EQEP1I, //!< Denotes a EQEP1I function
GPIO_53_Mode_MFSXA, //!< Denotes a MFSXA function
GPIO_53_Mode_Rsvd_1, //!< Denotes a reserved function
GPIO_54_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_54_Mode_SPISIMOA, //!< Denotes a SPISIMOA function
GPIO_54_Mode_EQEP2A, //!< Denotes a EQEP2A function
GPIO_54_Mode_HRCAP1, //!< Denotes a HRCAP1 function
GPIO_55_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_55_Mode_SPISOMIA, //!< Denotes a SPISOMIA function
GPIO_55_Mode_EQEP2B, //!< Denotes a EQEP2B function
GPIO_55_Mode_HRCAP2, //!< Denotes a HRCAP2 function
GPIO_56_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_56_Mode_SPICLKA, //!< Denotes a SPICLKA function
GPIO_56_Mode_EQEP2I, //!< Denotes a EQEP2I function
GPIO_56_Mode_HRCAP3, //!< Denotes a HRCAP3 function
GPIO_57_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_57_Mode_SPISTEA_NOT, //!< Denotes a SPISTEA_NOT function
GPIO_57_Mode_EQEP2S, //!< Denotes a EQEP2S function
GPIO_57_Mode_HRCAP4, //!< Denotes a HRCAP4 function
GPIO_58_Mode_GeneralPurpose=0, //!< Denotes a general purpose function
GPIO_58_Mode_MCLKRA, //!< Denotes a MCLKRA function
GPIO_58_Mode_SCITXDB, //!< Denotes a SCITXDB function
GPIO_58_Mode_EPWM7A //!< Denotes a EPWM7A function
} GPIO_Mode_e;
//! \brief Enumeration to define the general purpose I/O (GPIO) directions
//!
typedef enum
{
GPIO_Direction_Input=0, //!< Denotes an input direction
GPIO_Direction_Output //!< Denotes an output direction
} GPIO_Direction_e;
//! \brief Enumeration to define the general purpose I/O (GPIO) pullups
//!
typedef enum
{
GPIO_Pullup_Enable=0, //!< Denotes a pullup enabled
GPIO_Pullup_Disable //!< Denotes a pullup disabled
} GPIO_Pullup_e;
//! \brief Enumeration to define the general purpose I/O (GPIO) qualification
//!
typedef enum
{
GPIO_Qual_Sync = 0, //!< Denotes input will be synchronized to SYSCLK
GPIO_Qual_Sample_3, //!< Denotes input is qualified with 3 samples
GPIO_Qual_Sample_6, //!< Denotes input is qualified with 6 samples
GPIO_Qual_ASync //!< Denotes input is asynchronous
} GPIO_Qual_e;
//! \brief Enumeration to define the general purpose I/O (GPIO) ports
//!
typedef enum
{
GPIO_Port_A = 0, //!< GPIO Port A
GPIO_Port_B //!< GPIO Port B
} GPIO_Port_e;
//! \brief Enumeration to define the general purpose I/O (GPIO) numbers
//!
typedef enum
{
GPIO_Number_0=0, //!< Denotes GPIO number 0
GPIO_Number_1, //!< Denotes GPIO number 1
GPIO_Number_2, //!< Denotes GPIO number 2
GPIO_Number_3, //!< Denotes GPIO number 3
GPIO_Number_4, //!< Denotes GPIO number 4
GPIO_Number_5, //!< Denotes GPIO number 5
GPIO_Number_6, //!< Denotes GPIO number 6
GPIO_Number_7, //!< Denotes GPIO number 7
GPIO_Number_8, //!< Denotes GPIO number 8
GPIO_Number_9, //!< Denotes GPIO number 9
GPIO_Number_10, //!< Denotes GPIO number 10
GPIO_Number_11, //!< Denotes GPIO number 11
GPIO_Number_12, //!< Denotes GPIO number 12
GPIO_Number_13, //!< Denotes GPIO number 13
GPIO_Number_14, //!< Denotes GPIO number 14
GPIO_Number_15, //!< Denotes GPIO number 15
GPIO_Number_16, //!< Denotes GPIO number 16
GPIO_Number_17, //!< Denotes GPIO number 17
GPIO_Number_18, //!< Denotes GPIO number 18
GPIO_Number_19, //!< Denotes GPIO number 19
GPIO_Number_20, //!< Denotes GPIO number 20
GPIO_Number_21, //!< Denotes GPIO number 21
GPIO_Number_22, //!< Denotes GPIO number 22
GPIO_Number_23, //!< Denotes GPIO number 23
GPIO_Number_24, //!< Denotes GPIO number 24
GPIO_Number_25, //!< Denotes GPIO number 25
GPIO_Number_26, //!< Denotes GPIO number 26
GPIO_Number_27, //!< Denotes GPIO number 27
GPIO_Number_28, //!< Denotes GPIO number 28
GPIO_Number_29, //!< Denotes GPIO number 29
GPIO_Number_30, //!< Denotes GPIO number 30
GPIO_Number_31, //!< Denotes GPIO number 31
GPIO_Number_32, //!< Denotes GPIO number 32
GPIO_Number_33, //!< Denotes GPIO number 33
GPIO_Number_34, //!< Denotes GPIO number 34
GPIO_Number_35, //!< Denotes GPIO number 35
GPIO_Number_36, //!< Denotes GPIO number 36
GPIO_Number_37, //!< Denotes GPIO number 37
GPIO_Number_38, //!< Denotes GPIO number 38
GPIO_Number_39, //!< Denotes GPIO number 39
GPIO_Number_40, //!< Denotes GPIO number 40
GPIO_Number_41, //!< Denotes GPIO number 41
GPIO_Number_42, //!< Denotes GPIO number 42
GPIO_Number_43, //!< Denotes GPIO number 43
GPIO_Number_44, //!< Denotes GPIO number 44
GPIO_Number_50=50, //!< Denotes GPIO number 50
GPIO_Number_51, //!< Denotes GPIO number 51
GPIO_Number_52, //!< Denotes GPIO number 52
GPIO_Number_53, //!< Denotes GPIO number 53
GPIO_Number_54, //!< Denotes GPIO number 54
GPIO_Number_55, //!< Denotes GPIO number 55
GPIO_Number_56, //!< Denotes GPIO number 56
GPIO_Number_57, //!< Denotes GPIO number 57
GPIO_Number_58, //!< Denotes GPIO number 58
GPIO_numGpios
} GPIO_Number_e;
//! \brief Defines the General Purpose I/O (GPIO) object
//!
typedef struct _GPIO_Obj_
{
volatile uint32_t GPACTRL; //!< GPIO A Control Register
volatile uint32_t GPAQSEL1; //!< GPIO A Qualifier Select 1 Register
volatile uint32_t GPAQSEL2; //!< GPIO A Qualifier Select 2 Register
volatile uint32_t GPAMUX1; //!< GPIO A MUX 1 Register
volatile uint32_t GPAMUX2; //!< GPIO A MUX 2 Register
volatile uint32_t GPADIR; //!< GPIO A Direction Register
volatile uint32_t GPAPUD; //!< GPIO A Pull Up Disable Register
volatile uint16_t rsvd_1[2]; //!< Reserved
volatile uint32_t GPBCTRL; //!< GPIO B Control Register
volatile uint32_t GPBQSEL1; //!< GPIO B Qualifier Select 1 Register
volatile uint32_t GPBQSEL2; //!< GPIO B Qualifier Select 2 Register
volatile uint32_t GPBMUX1; //!< GPIO B MUX 1 Register
volatile uint32_t GPBMUX2; //!< GPIO B MUX 2 Register
volatile uint32_t GPBDIR; //!< GPIO B Direction Register
volatile uint32_t GPBPUD; //!< GPIO B Pull Up Disable Register
volatile uint16_t rsvd_4[24]; //!< Reserved
volatile uint32_t AIOMUX1; //!< Analog, I/O Mux 1 Register
volatile uint16_t rsvd_5[2]; //!< Reserved
volatile uint32_t AIODIR; //!< Analog, I/O Direction Register
volatile uint16_t rsvd_6[4]; //!< Reserved
volatile uint32_t GPADAT; //!< GPIO A Data Register
volatile uint32_t GPASET; //!< GPIO A Set Register
volatile uint32_t GPACLEAR; //!< GPIO A Clear Register
volatile uint32_t GPATOGGLE; //!< GPIO A Toggle Register
volatile uint32_t GPBDAT; //!< GPIO B Data Register
volatile uint32_t GPBSET; //!< GPIO B Set Register
volatile uint32_t GPBCLEAR; //!< GPIO B Clear Register
volatile uint32_t GPBTOGGLE; //!< GPIO B Toggle Register
volatile uint16_t rsvd_7[8]; //!< Reserved
volatile uint32_t AIODAT; //!< Analog I/O Data Register
volatile uint32_t AIOSET; //!< Analog I/O Data Set Register
volatile uint32_t AIOCLEAR; //!< Analog I/O Clear Register
volatile uint32_t AIOTOGGLE; //!< Analog I/O Toggle Register
volatile uint16_t GPIOXINTnSEL[3]; //!< XINT1-3 Source Select Registers
volatile uint16_t rsvd_8[5]; //!< Reserved
volatile uint32_t GPIOLPMSEL; //!< GPIO Low Power Mode Wakeup Select Register
} GPIO_Obj;
//! \brief Defines the general purpose I/O (GPIO) handle
//!
typedef struct _GPIO_Obj_ *GPIO_Handle;
// **************************************************************************
// the globals
// **************************************************************************
// the function prototypes
//! \brief Returns the data value present on a pin (either input or output)
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \return The boolean state of a pin (high/low)
extern bool GPIO_getData(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber);
//! \brief Returns the data value present on a GPIO port
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioPort The GPIO port
//! \return The data values for the specified port
extern uint32_t GPIO_getPortData(GPIO_Handle gpioHandle, const GPIO_Port_e gpioPort);
//! \brief Initializes the general purpose I/O (GPIO) object handle
//! \param[in] pMemory A pointer to the base address of the GPIO registers
//! \param[in] numBytes The number of bytes allocated for the GPIO object, bytes
//! \return The general purpose I/O (GPIO) object handle
extern GPIO_Handle GPIO_init(void *pMemory,const size_t numBytes);
//! \brief Sets the general purpose I/O (GPIO) signal direction
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \param[in] direction The signal direction
extern void GPIO_setDirection(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Direction_e direction);
//! \brief Sets the general purpose I/O (GPIO) pullup disable
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \param[in] pullup The pullup enable or disable signal
extern void GPIO_setPullup(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Pullup_e pullup);
//! \brief Sets the general purpose I/O (GPIO) external interrupt number
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \param[in] intNumber The interrupt number
extern void GPIO_setExtInt(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const CPU_ExtIntNumber_e intNumber);
//! \brief Sets the specified general purpose I/O (GPIO) signal low
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
extern void GPIO_setLow(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber);
//! \brief Sets the mode for the specified general purpose I/O (GPIO) signal
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \param[in] mode The mode
extern void GPIO_setMode(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Mode_e mode);
//! \brief Reads the specified general purpose I/O (GPIO)
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \return The general purpose I/O (GPIO) state, HIGH or LOW
extern bool GPIO_read(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber);
//! \brief Sets the specified general purpose I/O (GPIO) signal high
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
extern void GPIO_setHigh(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber);
//! \brief Sets data output on a given GPIO port
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioPort The GPIO number
//! \param[in] data The data to write to the port
extern void GPIO_setPortData(GPIO_Handle gpioHandle, const GPIO_Port_e gpioPort, const uint32_t data);
//! \brief Sets the qualification for the specified general purpose I/O (GPIO)
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \param[in] qualification The desired input qualification
extern void GPIO_setQualification(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber, const GPIO_Qual_e qualification);
//! \brief Sets the qualification period for the specified general purpose I/O block (8 I/O's per block)
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
//! \param[in] period The desired input qualification period
extern void GPIO_setQualificationPeriod(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber, const uint_least8_t period);
//! \brief Toggles the specified general purpose I/O (GPIO) signal
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
extern void GPIO_toggle(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber);
//! \brief Selects a gpio pin to wake up device from STANDBY and HALT LPM
//! \param[in] gpioHandle The general purpose I/O (GPIO) object handle
//! \param[in] gpioNumber The GPIO number
extern void GPIO_lpmSelect(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber);
#ifdef __cplusplus
}
#endif // extern "C"
//@} // ingroup
#endif // end of _GPIO_H_ definition
gpio.c
/* --COPYRIGHT--,BSD
* Copyright (c) 2015, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file drivers/gpio/src/32b/f28x/f2806x/gpio.c
//! \brief The functions in this file are used to configure the general
//! purpose I/O (GPIO) registers
//!
//! (C) Copyright 2015, Texas Instruments, Inc.
// **************************************************************************
// the includes
#include "sw/drivers/gpio/src/32b/f28x/f2806x/gpio.h"
// **************************************************************************
// the defines
// **************************************************************************
// the globals
// **************************************************************************
// the functions
bool GPIO_getData(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
if(gpioNumber < GPIO_Number_32)
{
return (bool)((gpio->GPADAT >> gpioNumber) & 0x0001);
}
else
{
return (bool)((gpio->GPBDAT >> (gpioNumber - GPIO_Number_32)) & 0x0001);
}
} // end of GPIO_getData() function
uint32_t GPIO_getPortData(GPIO_Handle gpioHandle, const GPIO_Port_e gpioPort)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
if(gpioPort == GPIO_Port_A)
{
return (gpio->GPADAT);
}
else if(gpioPort == GPIO_Port_B)
{
return (gpio->GPBDAT);
}
return (NULL);
} // end of GPIO_getPortData() function
GPIO_Handle GPIO_init(void *pMemory,const size_t numBytes)
{
GPIO_Handle gpioHandle;
if(numBytes < sizeof(GPIO_Obj))
{
return((GPIO_Handle)NULL);
}
// assign the handle
gpioHandle = (GPIO_Handle)pMemory;
return(gpioHandle);
} // end of GPIO_init() function
void GPIO_setPullup(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Pullup_e pullup)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
// clear the bit
gpio->GPAPUD &= (~((uint32_t)1 << gpioNumber));
// set the bit
gpio->GPAPUD |= (uint32_t)pullup << gpioNumber;
}
else
{
// clear the bit
gpio->GPBPUD &= (~((uint32_t)1 << (gpioNumber - GPIO_Number_32)));
// set the bit
gpio->GPBPUD |= (uint32_t)pullup << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setPullup() function
void GPIO_setDirection(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Direction_e direction)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
// clear the bit
gpio->GPADIR &= (~((uint32_t)1 << gpioNumber));
// set the bit
gpio->GPADIR |= (uint32_t)direction << gpioNumber;
}
else
{
// clear the bit
gpio->GPBDIR &= (~((uint32_t)1 << (gpioNumber - GPIO_Number_32)));
// set the bit
gpio->GPBDIR |= (uint32_t)direction << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setDirection() function
void GPIO_setExtInt(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const CPU_ExtIntNumber_e intNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
// associate the interrupt with the GPIO pin
gpio->GPIOXINTnSEL[intNumber] = gpioNumber;
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setExtInt() function
bool GPIO_read(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
bool gpio_status = 0;
uint32_t gpio_read = 0;
if(gpioNumber < GPIO_Number_32)
{
gpio_read = (gpio->GPADAT) & ((uint32_t)1 << gpioNumber);
}
else
{
gpio_read = (gpio->GPBDAT) & ((uint32_t)1 << (gpioNumber - GPIO_Number_32));
}
if(gpio_read == 0)
{
gpio_status = LOW;
}
else
{
gpio_status = HIGH;
}
return(gpio_status);
} // end of GPIO_read() function
void GPIO_setHigh(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
gpio->GPASET = (uint32_t)1 << gpioNumber;
}
else
{
gpio->GPBSET = (uint32_t)1 << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setHigh() function
void GPIO_setLow(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
gpio->GPACLEAR = (uint32_t)1 << gpioNumber;
}
else
{
gpio->GPBCLEAR = (uint32_t)1 << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setLow() function
void GPIO_setMode(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Mode_e mode)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 1))
{
uint_least8_t lShift = gpioNumber << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPAMUX1 &= (~clearBits);
// set the bits
gpio->GPAMUX1 |= setBits;
}
else if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 2))
{
uint_least8_t lShift = (gpioNumber - (GPIO_GPMUX_NUMGPIOS_PER_REG * 1)) << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPAMUX2 &= (~clearBits);
// set the bits
gpio->GPAMUX2 |= setBits;
}
else if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 3))
{
uint_least8_t lShift = (gpioNumber - (GPIO_GPMUX_NUMGPIOS_PER_REG * 2)) << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPBMUX1 &= (~clearBits);
// set the bits
gpio->GPBMUX1 |= setBits;
}
else if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 4))
{
uint_least8_t lShift = (gpioNumber - (GPIO_GPMUX_NUMGPIOS_PER_REG * 3)) << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPBMUX2 &= (~clearBits);
// set the bits
gpio->GPBMUX2 |= setBits;
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setMode() function
void GPIO_setPortData(GPIO_Handle gpioHandle, const GPIO_Port_e gpioPort, const uint32_t data)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioPort == GPIO_Port_A)
{
gpio->GPADAT = data;
}
else if(gpioPort == GPIO_Port_B)
{
gpio->GPBDAT = data;
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setPortData() function
void GPIO_setQualification(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber, const GPIO_Qual_e qualification)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 1) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * gpioNumber);
gpio->GPAQSEL1 &= ~(clearBits);
gpio->GPAQSEL1 |= (uint32_t)qualification << (2 * gpioNumber);
}
else if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 2) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 1)));
gpio->GPAQSEL2 &= ~(clearBits);
gpio->GPAQSEL2 |= (uint32_t)qualification << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 1)));
}
else if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 3) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 2)));
gpio->GPBQSEL1 &= ~(clearBits);
gpio->GPBQSEL1 |= (uint32_t)qualification << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 2)));
}
else if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 4) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 3)));
gpio->GPBQSEL2 &= ~(clearBits);
gpio->GPBQSEL2 |= (uint32_t)qualification << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 3)));
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setQualification() function
void GPIO_setQualificationPeriod(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber, const uint_least8_t period)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 1) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 2) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 8;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period << 8;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 3) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 16;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period << 16;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 4) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 24;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period << 24;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 5) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 6) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 8;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period << 8;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 7) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 16;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period << 16;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 8) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 24;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period << 24;
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setQualificationPeriod() function
void GPIO_toggle(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
gpio->GPATOGGLE = (uint32_t)1 << gpioNumber;
}
else
{
gpio->GPBTOGGLE = (uint32_t)1 << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_toggle() function
void GPIO_lpmSelect(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
gpio->GPIOLPMSEL |= ((uint32_t)1 << gpioNumber);
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_lpmSelect() function
用于 sci 的简单示例代码
Example_2806xSci_Echoback.c
/* --COPYRIGHT--,BSD
* Copyright (c) 2015, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file drivers/sci/src/32b/f28x/f2806x/sci.c
//! \brief Contains the various functions related to the
//! serial communications interface (SCI) object
//!
//! (C) Copyright 2015, Texas Instruments, Inc.
// **************************************************************************
// the includes
#include "sw/drivers/sci/src/32b/f28x/f2806x/sci.h"
// **************************************************************************
// the defines
// **************************************************************************
// the globals
// **************************************************************************
// the functions
void SCI_clearAutoBaudDetect(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFCT |= SCI_SCIFFCT_ABDCLR_BITS;
return;
} // end of SCI_clearAutoBaudDetect() function
void SCI_clearRxFifoOvf(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_FIFO_OVFCLR_BITS;
return;
} // end of SCI_clearRxFifoOvf() function
void SCI_clearRxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_INTCLR_BITS;
return;
} // end of SCI_clearRxFifoInt() function
void SCI_clearTxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_INTCLR_BITS;
return;
} // end of SCI_clearTxFifoInt() function
void SCI_disable(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RESET_BITS);
return;
} // end of SCI_disable() function
void SCI_disableAutoBaudAlign(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFCT &= (~SCI_SCIFFCT_CDC_BITS);
return;
} // end of SCI_disableAutoBaudAlign() function
void SCI_disableLoopBack(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_LB_ENA_BITS);
return;
} // end of SCI_disableLoopBack() function
void SCI_disableParity(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_PARITY_ENA_BITS);
return;
} // end of SCI_disableParity() function
void SCI_disableRx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RXENA_BITS);
return;
} // end of SCI_disableRx() function
void SCI_disableRxErrorInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RX_ERR_INT_ENA_BITS);
return;
} // end of SCI_disableRxErrorInt() function
void SCI_disableRxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFRX &= (~SCI_SCIFFRX_IENA_BITS);
return;
} // end of SCI_disableRxFifoInt() function
void SCI_disableRxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL2 &= (~SCI_SCICTL2_RX_INT_ENA_BITS);
return;
} // end of SCI_disableRxInt() function
void SCI_disableSleep(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_SLEEP_BITS);
return;
} // end of SCI_disableSleep() function
void SCI_disableTx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_TXENA_BITS);
return;
} // end of SCI_disableTx() function
void SCI_disableTxFifoEnh(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_FIFO_ENA_BITS);
return;
} // end of SCI_disableTxFifo() function
void SCI_disableTxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_IENA_BITS);
return;
} // end of SCI_disableTxFifoInt() function
void SCI_disableTxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL2 &= (~SCI_SCICTL2_TX_INT_ENA_BITS);
return;
} // end of SCI_disableTxInt() function
void SCI_disableTxWake(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_TXWAKE_BITS);
return;
} // end of SCI_disableTxWake() function
void SCI_enable(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_RESET_BITS;
return;
} // end of SCI_enable() function
void SCI_enableAutoBaudAlign(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFCT |= SCI_SCIFFCT_CDC_BITS;
return;
} // end of SCI_enableAutoBaudAlign() function
void SCI_enableChannels(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= (uint16_t)SCI_SCIFFTX_CHAN_RESET_BITS;
return;
} // SCI_enableChannels() function
void SCI_enableLoopBack(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICCR |= SCI_SCICCR_LB_ENA_BITS;
return;
} // end of SCI_enableLoopBack() function
void SCI_enableParity(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICCR |= SCI_SCICCR_PARITY_ENA_BITS;
return;
} // end of SCI_enableParity() function
void SCI_enableRx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_RXENA_BITS;
return;
} // end of SCI_enableRx() function
void SCI_enableRxErrorInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_RX_ERR_INT_ENA_BITS;
return;
} // end of SCI_enableRxErrorInt() function
void SCI_enableRxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL2 |= SCI_SCICTL2_RX_INT_ENA_BITS;
return;
} // end of SCI_enableRxInt() function
void SCI_enableSleep(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_SLEEP_BITS;
return;
} // end of SCI_enableSleep() function
void SCI_enableRxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_FIFO_RESET_BITS;
return;
} // end of SCI_enableRxFifo() function
void SCI_enableRxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFRX |= SCI_SCIFFRX_IENA_BITS;
return;
} // end of SCI_enableRxFifoInt() function
void SCI_enableTx(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_TXENA_BITS;
return;
} // end of SCI_enableTx() function
void SCI_enableTxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_FIFO_RESET_BITS;
return;
} // end of SCI_enableTxFifo() function
void SCI_enableTxFifoEnh(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_FIFO_ENA_BITS;
return;
} // end of SCI_enableTxFifo() function
void SCI_enableTxFifoInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIFFTX |= SCI_SCIFFTX_IENA_BITS;
return;
} // end of SCI_enableTxFifoInt() function
void SCI_enableTxInt(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL2 |= SCI_SCICTL2_TX_INT_ENA_BITS;
return;
} // end of SCI_enableTxInt() function
void SCI_enableTxWake(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCICTL1 |= SCI_SCICTL1_TXWAKE_BITS;
return;
} // end of SCI_enableTxWake() function
uint16_t SCI_getDataBlocking(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
while(SCI_rxDataReady(sciHandle) != true)
{
}
return(sci->SCIRXBUF);
} // end of SCI_getDataBlocking() function
uint16_t SCI_getDataNonBlocking(SCI_Handle sciHandle, uint16_t * success)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
if(SCI_rxDataReady(sciHandle))
{
*success = true;
return(sci->SCIRXBUF);
}
*success = false;
return(NULL);
} // end of SCI_getDataNonBlocking() function
SCI_FifoStatus_e SCI_getRxFifoStatus(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
SCI_FifoStatus_e status;
// get the status
status = (SCI_FifoStatus_e)(sci->SCIFFRX & SCI_SCIFFRX_FIFO_ST_BITS);
return(status);
} // SCI_getRxFifoStatus() function
SCI_FifoStatus_e SCI_getTxFifoStatus(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
SCI_FifoStatus_e status;
// get the status
status = (SCI_FifoStatus_e)(sci->SCIFFTX & SCI_SCIFFTX_FIFO_ST_BITS);
return(status);
} // SCI_getTxFifoStatus() function
SCI_Handle SCI_init(void *pMemory,const size_t numBytes)
{
SCI_Handle sciHandle;
if(numBytes < sizeof(SCI_Obj))
return((SCI_Handle)NULL);
// assign the handle
sciHandle = (SCI_Handle)pMemory;
return(sciHandle);
} // end of SCI_init() function
void SCI_putDataBlocking(SCI_Handle sciHandle, uint16_t data)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
while(SCI_txReady(sciHandle) != true)
{
}
// write the data
sci->SCITXBUF = data;
return;
} // end of SCI_putDataBlocking() function
uint16_t SCI_putDataNonBlocking(SCI_Handle sciHandle, uint16_t data)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
if(SCI_txReady(sciHandle))
{
// write the data
sci->SCITXBUF = data;
return(true);
}
return(false);
} // end of SCI_putDataNonBlocking() function
void SCI_reset(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICTL1 &= (~SCI_SCICTL1_RESET_BITS);
return;
} // end of SCI_reset() function
void SCI_resetChannels(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_CHAN_RESET_BITS);
asm(" nop");
sci->SCIFFTX |= (uint16_t)(SCI_SCIFFTX_CHAN_RESET_BITS);
return;
} // SCI_resetChannels() function
void SCI_resetRxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFRX &= (~SCI_SCIFFRX_FIFO_RESET_BITS);
asm(" nop");
sci->SCIFFRX |= SCI_SCIFFRX_FIFO_RESET_BITS;
return;
} // end of SCI_resetRxFifo() function
void SCI_resetTxFifo(SCI_Handle sciHandle)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFTX &= (~SCI_SCIFFTX_FIFO_RESET_BITS);
asm(" nop");
sci->SCIFFTX |= SCI_SCIFFTX_FIFO_RESET_BITS;
return;
} // end of SCI_resetTxFifo() function
void SCI_setBaudRate(SCI_Handle sciHandle,const SCI_BaudRate_e baudRate)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIHBAUD = ((uint16_t)baudRate >> 8);
sci->SCILBAUD = baudRate & 0xFF;
return;
} // end of SCI_setBaudRate() function
void SCI_setCharLength(SCI_Handle sciHandle,const SCI_CharLength_e charLength)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_CHAR_LENGTH_BITS);
// set the bits
sci->SCICCR |= charLength;
return;
} // SCI_setCharLength() function
void SCI_setMode(SCI_Handle sciHandle,const SCI_Mode_e mode)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_MODE_BITS);
// set the bits
sci->SCICCR |= mode;
return;
} // SCI_setMode() function
void SCI_setNumStopBits(SCI_Handle sciHandle,const SCI_NumStopBits_e numBits)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_STOP_BITS);
// set the bits
sci->SCICCR |= numBits;
return;
} // SCI_setNumStopBits() function
void SCI_setPriority(SCI_Handle sciHandle,const SCI_Priority_e priority)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// set the bits
sci->SCIPRI = priority;
return;
} // SCI_setPriority() function
void SCI_setParity(SCI_Handle sciHandle,const SCI_Parity_e parity)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCICCR &= (~SCI_SCICCR_PARITY_BITS);
// set the bits
sci->SCICCR |= parity;
return;
} // SCI_setParity() function
void SCI_setTxDelay(SCI_Handle sciHandle,const uint_least8_t delay)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the bits
sci->SCIFFCT &= (~SCI_SCIFFCT_DELAY_BITS);
// set the bits
sci->SCIFFCT |= delay;
return;
} // end of SCI_setTxDelay() function
void SCI_setRxFifoIntLevel(SCI_Handle sciHandle, const SCI_FifoLevel_e fifoLevel)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the value
sci->SCIFFRX &= (~SCI_SCIFFRX_IL_BITS);
// set the bits
sci->SCIFFRX |= fifoLevel;
return;
} // end of SCI_setRxFifoIntLevel() function
void SCI_setTxFifoIntLevel(SCI_Handle sciHandle,const SCI_FifoLevel_e fifoLevel)
{
SCI_Obj *sci = (SCI_Obj *)sciHandle;
// clear the value
sci->SCIFFTX &= (~SCI_SCIFFTX_IL_BITS);
// set the bits
sci->SCIFFTX |= fifoLevel;
return;
} // end of SCI_setTxFifoIntLevel() function
// end of file
F2806x_Sci.c
//########################################################################### // // FILE: F2806x_Sci.c // // TITLE: F2806x SCI Initialization & Support Functions. // //########################################################################### // $TI Release: $ // $Release Date: $ // $Copyright: // Copyright (C) 2009-2022 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //########################################################################### // // Included Files // #include "F2806x_Device.h" // F2806x Headerfile Include File #include "F2806x_Examples.h" // F2806x Examples Include File // // InitSci - This function initializes the SCI(s) to a known state. // void InitSci(void) { // // Initialize SCI-A/B: // } // // InitSciGpio - This function initializes GPIO pins to function as SCI pins // // Each GPIO pin can be configured as a GPIO pin or up to 3 different // peripheral functional pins. By default all pins come up as GPIO // inputs after reset. // // Caution: // Only one GPIO pin should be enabled for SCITXDA/B operation. // Only one GPIO pin shoudl be enabled for SCIRXDA/B operation. // Comment out other unwanted lines. // void InitSciGpio() { #if DSP28_SCIA InitSciaGpio(); #endif // endif DSP28_SCIA #if DSP28_SCIB InitScibGpio(); #endif // endif DSP28_SCIB } #if DSP28_SCIA // // InitSciaGpio - // void InitSciaGpio() { EALLOW; // // Enable internal pull-up for the selected pins // Pull-ups can be enabled or disabled disabled by the user. // This will enable the pullups for the specified pins. // GpioCtrlRegs.GPAPUD.bit.GPIO28 = 0; // Enable pull-up for GPIO28 (SCIRXDA) //GpioCtrlRegs.GPAPUD.bit.GPIO7 = 0; // Enable pull-up for GPIO7 (SCIRXDA) GpioCtrlRegs.GPAPUD.bit.GPIO29 = 0; // Enable pull-up for GPIO29 (SCITXDA) //GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0; // Enable pull-up for GPIO12 (SCITXDA) // // Set qualification for selected pins to asynch only // Inputs are synchronized to SYSCLKOUT by default. // This will select asynch (no qualification) for the selected pins. // GpioCtrlRegs.GPAQSEL2.bit.GPIO28 = 3; // Asynch input GPIO28 (SCIRXDA) //GpioCtrlRegs.GPAQSEL1.bit.GPIO7 = 3; // Asynch input GPIO7 (SCIRXDA) // // Configure SCI-A pins using GPIO regs // This specifies which of the possible GPIO pins will be SCI functional // pins. // // // Configure GPIO28 for SCIRXDA operation // GpioCtrlRegs.GPAMUX2.bit.GPIO28 = 1; // // Configure GPIO7 for SCIRXDA operation // //GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 2; // // Configure GPIO29 for SCITXDA operation // GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 1; // // Configure GPIO12 for SCITXDA operation // //GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 2; EDIS; } #endif // endif DSP28_SCIA #if DSP28_SCIB // // InitScibGpio - // void InitScibGpio() { EALLOW; // // Enable internal pull-up for the selected pins // Pull-ups can be enabled or disabled disabled by the user. // This will enable the pullups for the specified pins. // GpioCtrlRegs.GPAPUD.bit.GPIO11 = 0; // Enable pull-up for GPIO11 (SCIRXDB) //GpioCtrlRegs.GPAPUD.bit.GPIO15 = 0; // Enable pull-up for GPIO15 (SCIRXDB) //GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // Enable pull-up for GPIO19 (SCIRXDB) //GpioCtrlRegs.GPAPUD.bit.GPIO23 = 0; // Enable pull-up for GPIO23 (SCIRXDB) //GpioCtrlRegs.GPBPUD.bit.GPIO41 = 0; // Enable pull-up for GPIO41 (SCIRXDB) //GpioCtrlRegs.GPBPUD.bit.GPIO44 = 0; // Enable pull-up for GPIO44 (SCIRXDB) GpioCtrlRegs.GPAPUD.bit.GPIO9 = 0; // Enable pull-up for GPIO9 (SCITXDB) //GpioCtrlRegs.GPAPUD.bit.GPIO14 = 0; // Enable pull-up for GPIO14 (SCITXDB) //GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; // Enable pull-up for GPIO18 (SCITXDB) //GpioCtrlRegs.GPAPUD.bit.GPIO22 = 0; // Enable pull-up for GPIO22 (SCITXDB) //GpioCtrlRegs.GPBPUD.bit.GPIO40 = 0; // Enable pull-up for GPIO40 (SCITXDB) //GpioCtrlRegs.GPBPUD.bit.GPIO58 = 0; // Enable pull-up for GPIO58 (SCITXDB) // // Set qualification for selected pins to asynch only // Inputs are synchronized to SYSCLKOUT by default. // This will select asynch (no qualification) for the selected pins. // GpioCtrlRegs.GPAQSEL1.bit.GPIO11 = 3; // Asynch input GPIO11 (SCIRXDB) //GpioCtrlRegs.GPAQSEL1.bit.GPIO15 = 3; // Asynch input GPIO15 (SCIRXDB) //GpioCtrlRegs.GPAQSEL2.bit.GPIO19 = 3; // Asynch input GPIO19 (SCIRXDB) //GpioCtrlRegs.GPAQSEL2.bit.GPIO23 = 3; // Asynch input GPIO23 (SCIRXDB) //GpioCtrlRegs.GPBQSEL1.bit.GPIO41 = 3; // Asynch input GPIO41 (SCIRXDB) //GpioCtrlRegs.GPBQSEL1.bit.GPIO44 = 3; // Asynch input GPIO44 (SCIRXDB) // // Configure SCI-B pins using GPIO regs // This specifies which of the possible GPIO pins will be SCI functional // pins. // // // Configure GPIO11 for SCIRXDB operation // GpioCtrlRegs.GPAMUX1.bit.GPIO11 = 2; // // Configure GPIO15 for SCIRXDB operation // //GpioCtrlRegs.GPAMUX1.bit.GPIO15 = 2; // // Configure GPIO19 for SCIRXDB operation // //GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 2; // // Configure GPIO23 for SCIRXDB operation // //GpioCtrlRegs.GPAMUX2.bit.GPIO23 = 3; // // Configure GPIO41 for SCIRXDB operation // //GpioCtrlRegs.GPBMUX1.bit.GPIO41 = 2; // // Configure GPIO44 for SCIRXDB operation // //GpioCtrlRegs.GPBMUX1.bit.GPIO44 = 2; // // Configure GPIO9 for SCITXDB operation // GpioCtrlRegs.GPAMUX1.bit.GPIO9 = 2; // // Configure GPIO14 for SCITXDB operation // //GpioCtrlRegs.GPAMUX1.bit.GPIO14 = 2; // // Configure GPIO18 for SCITXDB operation // //GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 2; // // Configure GPIO22 for SCITXDB operation // //GpioCtrlRegs.GPAMUX2.bit.GPIO22 = 3; // // Configure GPIO40 for SCITXDB operation // //GpioCtrlRegs.GPBMUX1.bit.GPIO40 = 2; // // Configure GPIO58 for SCITXDB operation // //GpioCtrlRegs.GPBMUX2.bit.GPIO58 = 2; EDIS; } #endif // endif DSP28_SCIB // // End of file //
F2806x_Gpio.h
/* --COPYRIGHT--,BSD
* Copyright (c) 2015, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file drivers/gpio/src/32b/f28x/f2806x/gpio.c
//! \brief The functions in this file are used to configure the general
//! purpose I/O (GPIO) registers
//!
//! (C) Copyright 2015, Texas Instruments, Inc.
// **************************************************************************
// the includes
#include "sw/drivers/gpio/src/32b/f28x/f2806x/gpio.h"
// **************************************************************************
// the defines
// **************************************************************************
// the globals
// **************************************************************************
// the functions
bool GPIO_getData(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
if(gpioNumber < GPIO_Number_32)
{
return (bool)((gpio->GPADAT >> gpioNumber) & 0x0001);
}
else
{
return (bool)((gpio->GPBDAT >> (gpioNumber - GPIO_Number_32)) & 0x0001);
}
} // end of GPIO_getData() function
uint32_t GPIO_getPortData(GPIO_Handle gpioHandle, const GPIO_Port_e gpioPort)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
if(gpioPort == GPIO_Port_A)
{
return (gpio->GPADAT);
}
else if(gpioPort == GPIO_Port_B)
{
return (gpio->GPBDAT);
}
return (NULL);
} // end of GPIO_getPortData() function
GPIO_Handle GPIO_init(void *pMemory,const size_t numBytes)
{
GPIO_Handle gpioHandle;
if(numBytes < sizeof(GPIO_Obj))
{
return((GPIO_Handle)NULL);
}
// assign the handle
gpioHandle = (GPIO_Handle)pMemory;
return(gpioHandle);
} // end of GPIO_init() function
void GPIO_setPullup(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Pullup_e pullup)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
// clear the bit
gpio->GPAPUD &= (~((uint32_t)1 << gpioNumber));
// set the bit
gpio->GPAPUD |= (uint32_t)pullup << gpioNumber;
}
else
{
// clear the bit
gpio->GPBPUD &= (~((uint32_t)1 << (gpioNumber - GPIO_Number_32)));
// set the bit
gpio->GPBPUD |= (uint32_t)pullup << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setPullup() function
void GPIO_setDirection(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Direction_e direction)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
// clear the bit
gpio->GPADIR &= (~((uint32_t)1 << gpioNumber));
// set the bit
gpio->GPADIR |= (uint32_t)direction << gpioNumber;
}
else
{
// clear the bit
gpio->GPBDIR &= (~((uint32_t)1 << (gpioNumber - GPIO_Number_32)));
// set the bit
gpio->GPBDIR |= (uint32_t)direction << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setDirection() function
void GPIO_setExtInt(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const CPU_ExtIntNumber_e intNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
// associate the interrupt with the GPIO pin
gpio->GPIOXINTnSEL[intNumber] = gpioNumber;
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setExtInt() function
bool GPIO_read(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
bool gpio_status = 0;
uint32_t gpio_read = 0;
if(gpioNumber < GPIO_Number_32)
{
gpio_read = (gpio->GPADAT) & ((uint32_t)1 << gpioNumber);
}
else
{
gpio_read = (gpio->GPBDAT) & ((uint32_t)1 << (gpioNumber - GPIO_Number_32));
}
if(gpio_read == 0)
{
gpio_status = LOW;
}
else
{
gpio_status = HIGH;
}
return(gpio_status);
} // end of GPIO_read() function
void GPIO_setHigh(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
gpio->GPASET = (uint32_t)1 << gpioNumber;
}
else
{
gpio->GPBSET = (uint32_t)1 << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setHigh() function
void GPIO_setLow(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
gpio->GPACLEAR = (uint32_t)1 << gpioNumber;
}
else
{
gpio->GPBCLEAR = (uint32_t)1 << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setLow() function
void GPIO_setMode(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber,const GPIO_Mode_e mode)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 1))
{
uint_least8_t lShift = gpioNumber << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPAMUX1 &= (~clearBits);
// set the bits
gpio->GPAMUX1 |= setBits;
}
else if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 2))
{
uint_least8_t lShift = (gpioNumber - (GPIO_GPMUX_NUMGPIOS_PER_REG * 1)) << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPAMUX2 &= (~clearBits);
// set the bits
gpio->GPAMUX2 |= setBits;
}
else if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 3))
{
uint_least8_t lShift = (gpioNumber - (GPIO_GPMUX_NUMGPIOS_PER_REG * 2)) << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPBMUX1 &= (~clearBits);
// set the bits
gpio->GPBMUX1 |= setBits;
}
else if(gpioNumber < (GPIO_GPMUX_NUMGPIOS_PER_REG * 4))
{
uint_least8_t lShift = (gpioNumber - (GPIO_GPMUX_NUMGPIOS_PER_REG * 3)) << 1;
uint32_t clearBits = (uint32_t)GPIO_GPMUX_CONFIG_BITS << lShift;
uint32_t setBits = (uint32_t)mode << lShift;
// clear the bits
gpio->GPBMUX2 &= (~clearBits);
// set the bits
gpio->GPBMUX2 |= setBits;
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setMode() function
void GPIO_setPortData(GPIO_Handle gpioHandle, const GPIO_Port_e gpioPort, const uint32_t data)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioPort == GPIO_Port_A)
{
gpio->GPADAT = data;
}
else if(gpioPort == GPIO_Port_B)
{
gpio->GPBDAT = data;
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setPortData() function
void GPIO_setQualification(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber, const GPIO_Qual_e qualification)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 1) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * gpioNumber);
gpio->GPAQSEL1 &= ~(clearBits);
gpio->GPAQSEL1 |= (uint32_t)qualification << (2 * gpioNumber);
}
else if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 2) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 1)));
gpio->GPAQSEL2 &= ~(clearBits);
gpio->GPAQSEL2 |= (uint32_t)qualification << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 1)));
}
else if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 3) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 2)));
gpio->GPBQSEL1 &= ~(clearBits);
gpio->GPBQSEL1 |= (uint32_t)qualification << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 2)));
}
else if(gpioNumber <= ((GPIO_GPxQSELx_NUMGPIOS_PER_REG * 4) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxQSELy_GPIOx_BITS << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 3)));
gpio->GPBQSEL2 &= ~(clearBits);
gpio->GPBQSEL2 |= (uint32_t)qualification << (2 * (gpioNumber - (GPIO_GPxQSELx_NUMGPIOS_PER_REG * 3)));
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setQualification() function
void GPIO_setQualificationPeriod(GPIO_Handle gpioHandle, const GPIO_Number_e gpioNumber, const uint_least8_t period)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 1) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 2) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 8;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period << 8;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 3) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 16;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period << 16;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 4) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 24;
gpio->GPACTRL &= ~(clearBits);
gpio->GPACTRL |= (uint32_t)period << 24;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 5) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 6) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 8;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period << 8;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 7) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 16;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period << 16;
}
else if(gpioNumber <= ((GPIO_GPxCTRL_QUALPRDx_NUMBITS_PER_REG * 8) - 1))
{
uint32_t clearBits = (uint32_t)GPIO_GPxCTRL_QUALPRDx_BITS << 24;
gpio->GPBCTRL &= ~(clearBits);
gpio->GPBCTRL |= (uint32_t)period << 24;
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_setQualificationPeriod() function
void GPIO_toggle(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
if(gpioNumber < GPIO_Number_32)
{
gpio->GPATOGGLE = (uint32_t)1 << gpioNumber;
}
else
{
gpio->GPBTOGGLE = (uint32_t)1 << (gpioNumber - GPIO_Number_32);
}
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_toggle() function
void GPIO_lpmSelect(GPIO_Handle gpioHandle,const GPIO_Number_e gpioNumber)
{
GPIO_Obj *gpio = (GPIO_Obj *)gpioHandle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
gpio->GPIOLPMSEL |= ((uint32_t)1 << gpioNumber);
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of GPIO_lpmSelect() function