请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28027F-Q1 主题中讨论的其他器件:LAUNCHXL-F28027F、 MOTORWARE
您好!
我将 BOOSTXL-DRV8213RH 与 LAUNCHXL-f28027F 以及“motorware_1_01_00_18”软件包(尤其是 proj_LAB11a (InstaSPIN 项目和实验室用户指南)结合使用–到目前为止一切都正常。
出于测试目的、我希望驱动15A 的持续电流一相、7.5A 的另两相。 因此、我的想法是使用 Rs 重校准过程、因为这一过程(根据我的理解)将强制 USER_MOTOR_RES_EST_CURRENT 根据请求抛出相位。
我不使用电机、而是使用星形拓扑中连接的三个 R-L 组件(作为电机)(R=0.47Ohm、L=6.4mH)。 我在 LAB11a 中将估算电流(USER_MOTOR_RES_EST_CURRENT)调整为15A、但没有在 user.h 文件中更改电机参数。 然后、我开始偏移补偿、然后重新计算 Rs (RsRecalc)、同时监控相电流。
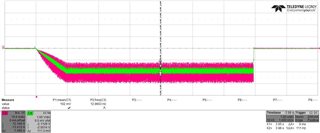
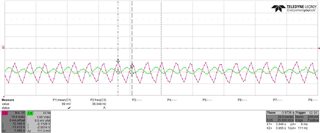
我遇到两个问题;
-为什么会出现20A 的平均电流?
-为什么电流以大约100Hz 的频率振荡?
我还有其他(更简单)的方法来强制 IL?
此致
Thomas