


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28068M 您好!
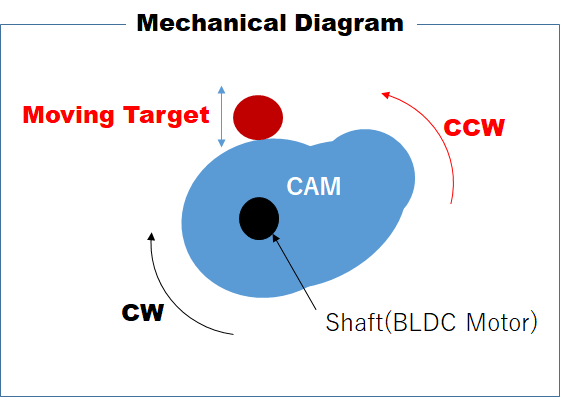
我们正在尝试使用凸轮轴机构获取 InstaSPIN-Motion 参数、如下所示。
-已为没有凸轮机构的原始电机获取 FOC 参数。
到目前为止、它仅是 CW 旋转。
我们在使用 lab05c 获取参数时更改了各种值。 但是、在 InstaSPIN-MOTION 参数采集期间、我们不能在此机制下旋转360度。
我们必须选择施加最大机械力的位置、因为在 lab05c 识别过程中、它只能在很短的时间内旋转。
问题1:请告诉我如何使用此机制转弯并获取 lab05c 中的参数。
这一次、不仅会执行 CW 操作、还会执行 CCW 操作。
在我们的机制上、CW 运行和 CCW 运行期间、运动参数被认为是不同的。
Q2:请告诉我如何在 CW 和 CCW 中获取运动参数。
我们正在考虑以下情况。
1.获取顺时针旋转的运动参数。
在 lab05c 的 CW 运行期间、设定#define USER_MOTOR_MAX_SPEED_KRPM (6.0)来获得运动参数、
之后、
2.获取 CCW 旋转时的 InstaSPIN-MOTION 参数。
在 lab05c 的 CCW 运行期间、将#define USER_MOTOR_MAX_SPEED_KRPM 更改为(-6.0)后、我们得到 CCW 运动参数。
此致、
ay0689
