请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28379D 主题中讨论的其他器件:TMDSDOCK28379D
是否可以每半个基周期将 ePWM 计数方向从上数下数改为下数?
我想实施 AZSPWM 方法。 为了获得 PWM 信号、使用了以下算法:如果基准相位电压的斜率为正、则将调制波形与 Vtri 进行比较、如果基准相位电压的斜率为负、则将调制波形与-Vtri 进行比较。
在适用于 ePWM 模块 的 MATLAB Simulink 帮助文件中、我可以设置"相位同步后的计数方向"、前提是我选择"将计数器设置为通过输入端口指定的相位值"、从而在模块上创建相位输入端口 PHS。
此外、在帮助文件中、它显示:
相位同步后的计数方向—相位同步后的计数器方向
同步后倒计数(默认)|同步后递增计数
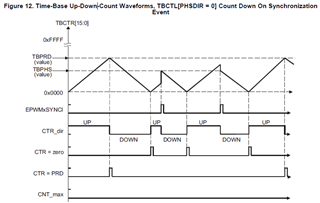
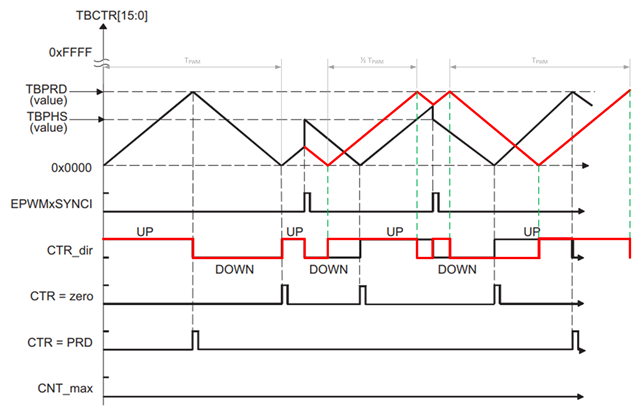
同步后、将计时器配置为递增或递减计数。 此参数对应于时基控制寄存器(TBCTL)的 PHSDIR 域。
依赖关系
当计数模式为向上/向下计数并且同步操作设置为通过对话框或输入端口指定的相位值时、将显示此参数。
PHS 看起来像是逻辑输入? 是这样吗? 对于 AZSPWM 算法、想法是根据 PWM 基准斜率为每个 ePWM 生成一个逻辑信号(斜率)、例如 TRUE =上升斜率、使用上升-下降(Vtri)和 FALSE =下降斜率、使用下降(-Vtri)。
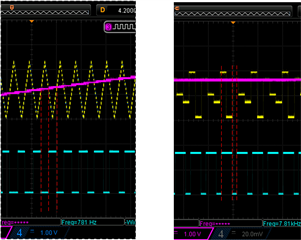
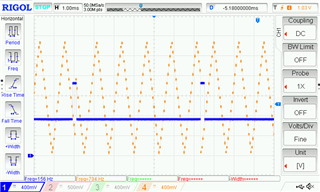
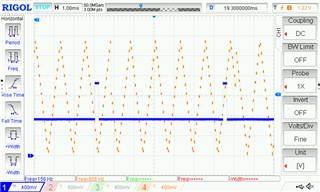
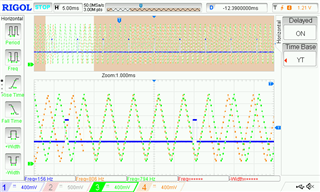
图1:fsw = 5 * f0、图2:fsw = 4 * f0


编辑:方向改变可在计数波形的任何位置发生;它全部取决于何时检测到斜率改变。
到目前为止、在我的 ePWM 模块中、"同步化操作"设置为"可"。