


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8424EVM 您好,
我有一个与现行法规有关的问题。
这是我的实际驱动程序配置:
- 1/16微步
- 智能调谐动态衰减和智能调谐波纹控制(均已测试)
- Toff = 16us
- 运行电流= 800mA
- 转速= 300 rpm
我使用了两 种不同的步进电机:
- 来自 Boxer 泵的29QQ 蠕动泵(每转200步)
- Minebea 17PM-K443BNVA1637 (每转200步)
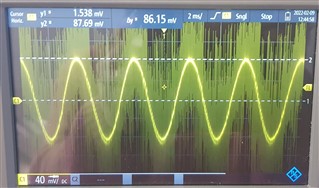
我使用分流器(2A-200mV)测量了此配置的电流,29QQ 步进电机无负载的电流波形如下:
使用具有较小负载的 Minebea 17PM 步进电机的配置相同,电流波形如下:
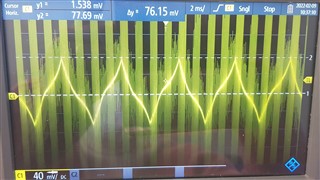
在第二个电机中,可能会发现电流没有正弦波形。 为什么会发生这种情况? 我在以下文档 https://www.tij.co.jp/jp/lit/ml/slyp742/slyp742.pdf?ts=1644397542933&ref_url=https%253A%252F%252Fwww.google.com%252F 中读到 过,使用智能波纹控件,驱动器可以以任何速度保持正弦电流波形。 但我在n´t 第二个马达的测量结果中看不到这一点。
请给我一个解释,为什么正弦电流波形不能保持?
非常感谢您的参与
此致
