请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8871 亲爱的社区,我有 一个关于DRV8871的基本问题,因为我是该组件的新用户。
我想同时驱动直流电机(仅限正向)。 使用来自微控制器的PWM信号。
- 问题1:
现在,我看到IC有两个输入IN1和IN2,我不清楚应该如何应用PWM。 (我的理解是,其中一个针脚获得恒定电压,例如0V或5V,另一个针脚接收PWM信号)
从下面的表1中,我的理解是,信号应按照表的底部两行,IN1=1 in2=0以驱动电机前进, 当电枢电压设置为零且电动机在自由轮操作中工作时(即电枢电感通过自由轮二极管释放其能量),则为IN1=1 in2=1。
如果正确,则IN1始终为= 1,因此我可以将其连接到微控制器的+5V。 In2是应用来自微控制器的PWM的引脚, 反过来,(这里 是我感到困惑的地方)当引脚2上的PWM输出过低时,电机实际上向前驱动,而当引脚2上的PWM过高时,电机断开(电流为自由转动)。 因此,标准后缘PWM的占空比将是 高占空比(in2大多数在1处)将意味着低速,而低占空比(in2大多数在0处)将意味着电机的高速(这有点与直观相反)。 如果您能确认我的理解不正确( 即,高电机转速= IN1上给出的PWM的低占空比),那就更好了。
此外,IN1 =0和in2 =0的条件是否相关? (我正在使用频率为980 Hz的PWM)

- 问题2.
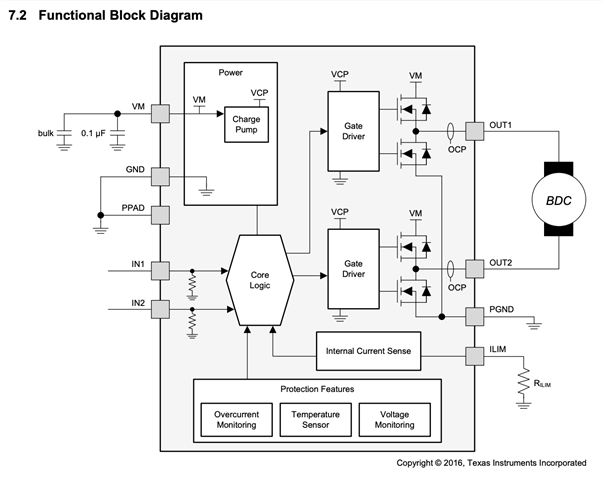
图 7.2 "电源"接地? 即直流电机接地? 与图 7.2 ,哪个应连接到微控制器接地?
感谢你的帮助
Leo