This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1044206/drv8837-how-do-we-measure-rotor-speed-if-we-don-t-use-magnetic-encoder
大家好、
客户现在正在使用磁性编码器进行转子速度控制、但现在他们不想再以成本为代价使用磁性编码器。 所以、他们在问我们是否有其他方法来测量速度? 例如、电流?
希望尽快得到您的回复、谢谢!
英里、您好、
实现无传感器位置监控有多种方法。 最常用的方法之一是电流纹波计数方法。 下面是一些有关如何实现位置控制和失速检测纹波计数的资源。 这种方法有一些缺点。 由于电流纹波与电机 BEMF 直接相关、因此在初始启动或电机减速期间、纹波将不稳定、并可能导致精度问题。 您的固件需要考虑这一点并不断校准系统。 因此、该解决方案需要大量固件。
英里、
我忘了提到一件事。 由于 DRV8837是一款集成式 H 桥驱动器、因此该方法可能不适用于 DRV8837。 此解决方案最适合具有直列式电流感应(直列式=双向电流感应)的 DRV8706等栅极驱动器。
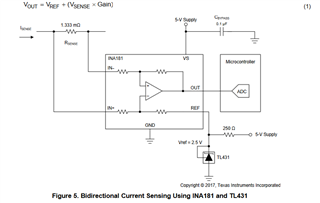
您仍然可以将电流纹波计数方法与 DRV8837结合使用。 下面介绍了如何添加感应电阻器、以便在低侧 FET 的源极上产生较小的压降。 该小电压可使用 INA181 ( 在双向电流感应拓扑中)等电流感应放大器进行放大、并通过参考设计中所述的电路(在之前的答复中链接)。
如果您有任何疑问、请告诉我、我很乐意为您提供帮助。
这非常有趣。 顺便说一下、我还有一个问题、
在某些情况下、我们为什么需要快速衰减? 它不具有制动功能。
我建议阅读此应用手册(https://www.ti.com/lit/an/slva321a/slva321a.pdf?ts=1634097909811&ref_url=https%253A%252F%252Fwww.ti.com%252Fsitesearch%252Fdocs%252Funiversalsearch.tsp%253FlangPref%253Den-US%2526searchTerm%253DSlva321%2526nr%253D25)。 简而言之、这两种衰减模式均可使用、但具体取决于您的应用需求。 在某些情况下、快速衰减是最佳选择(尤其是当您的应用需要快速衰减电流时)。 但代价是纹波更高(如果您尝试实现电流纹波计数、这可能是一件好事)。 制动器相反。 电流衰减速度较慢、但电流纹波较低。
我希望这能回答你的问题。