请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8424EVM 主题中讨论的其他器件:DRV8424
尊敬的团队:
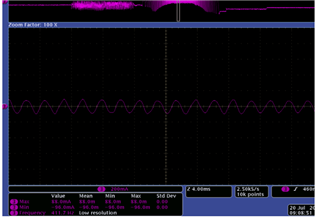
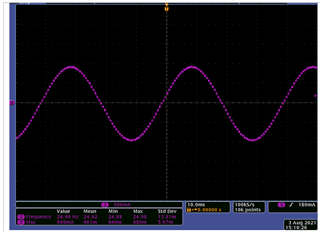
如果客户增加工作频率、电流将成为一个三角波、如下图所示
这是正常的吗? 原因是什么?
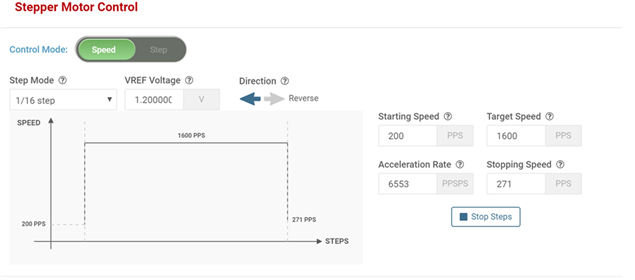
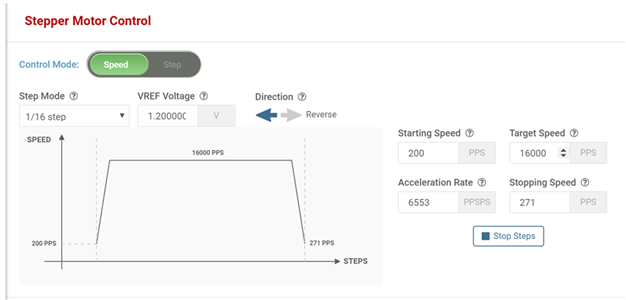
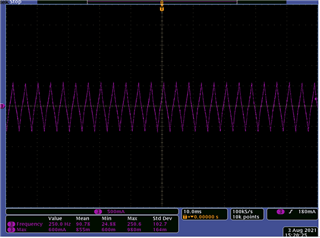
步进频率为500K。 如果使用1/256微步进、最高控制只能达到1.95pps
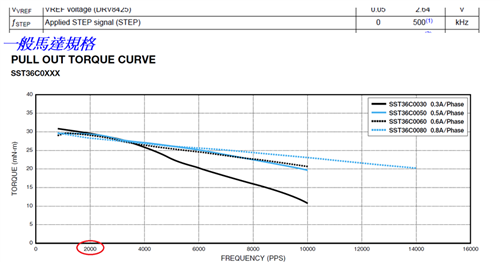
我们可以将其增加到1M 或1.5M 吗? 我们是否有另一种解决方案可以达到更高 的步进频率 ?
尊敬的团队:
如果客户增加工作频率、电流将成为一个三角波、如下图所示
这是正常的吗? 原因是什么?
步进频率为500K。 如果使用1/256微步进、最高控制只能达到1.95pps
我们可以将其增加到1M 或1.5M 吗? 我们是否有另一种解决方案可以达到更高 的步进频率 ?