This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1286472/drv8462-achieving-a-current-sine-wave-approaching-2000rpm
(我不知道为什么此帖子看起来已损坏、但我会再次发布我的消息) 大家好 Murugavel4637、在上一个线程中、我试图用您分享的设置创建一个正弦电流波。 在使用评估板时(在6667步长下全步进、使用1/256自动步进)、我无法创建一个看起来几乎与之前的线程中显示的一样干净的波(正弦波)。 您曾强调过加速需要是线性的。 您还提到、您已移除跳线以分别输入脉冲。 我对全步进/自动微步进允许 GUI 输入步进感到困惑。 您曾提到、应该没有区别。 您会再次解释一下为何拆下跳线并向评估板输入脉冲? 我使用了这个电机(例如)、但无法将它运行到2000rpm。 https://us.nanotec.com/products/375-st4118l3004-a 。 我不确定我是否应该尝试摘录前三个
D、但如果需要、我会和版主可以删除。 谢谢 Murugavel。
(这是前一线程的片段)
Chris、您好!
电流波形可能会因所用衰减模式的差异而有所不同、但如果电机能够在给定电源电压和目标速度下以目标速度提供必要的扭矩、则 IFS 应在您突出显示的范围内以高 RPM 旋转。 我和我有一个 NEMA17 MOons 的步进电机、 https://www.moonsindustries.com/p/am-series-standard-hybrid-stepper-motors/am17hdb410-01n-000004611110011162。 我通过以下设置将其连接到 DRV8462EVM。 VM = 48V、IFS = 0.5A、256 uSteps、STDD 衰减模式、使用默认 TOFF 且无负载。 下面是500RPM、1000RPM 和2000RPM 时的电流波形。 EVM GUI 无法生成高于65535PPS 的值。 因此、我移除了接头上 STEP 输入的跳线短路、并使用用于加速的线性斜坡输入3V 外部 STEP 输入。 线性斜坡加速度对于实现更高的速度至关重要、否则惯性会使电机失速。
500转/分:
1000RPM:(加载步进可改善此波形)
2000 RPM:
我能够始终以2000 RPM 的速度运行电机、而不会出现任何问题。 能否实现相同性能取决于电机特性和加速度曲线。 DRV8462能够顺利地将我用于此测试的步进电机驱动至2000RPM。 我确实注意到1330 RPM 左右的谐振行为、这会使电流幅度更低、但仍然产生足够的扭矩。 其原因是反电动势振幅和使用驱动电流波形的相位跳动。 当我加载电机时、此波形在这些特定速度下得到了改进。
如您所说、精密 的 FOC 类型步进驱动器 可以在您感兴趣的整个速度范围内为您提供更好的电流波形。 当然、这会涉及复杂的算法。 为此、您应考虑没有内部分度器的驱动器器件。 DRV8962、四路半桥驱动器将是很好的选择。 请参阅此 E2E 博文 https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1250105/closed-loop-stepper-driver?tisearch=e2e-sitesearch&keymatch=DRV8962%2525252525252520stepper%2525252525252520motor%2525252525252520field%2525252525252520oriented%2525252525252520control#。
我希望这对您有所帮助。 谢谢你。
此致、Murugavel
尊敬的 Murugavel:
感谢您将最后一个回复放在一起、这有助于看到另一个评估板运行这些波形(插入 Roger Banister Effect)。 在先前的测试中、我们始终运行全步进(6667pps)、然后使用自动微步进1/256以执行256步进速率@2000RPM。 使用自动微步进与在 STEP 输入中运行非常快的步进速率之间是否存在性能差异? 我相信我们已经得出了 STEP 引脚的100kHz 输入的最大规格。 您是否想进一步描述您运行256uStep 的设置?
我将研究 DRV8962、并在路上设置一个评估板、谢谢您的领导。 如果这样可以在更精细的单个增量下实现更高的电流控制、我认为这正是我们所期望的。 理想情况下、我们希望一个能够根据步进输入处理电流反馈并运行 PID 环路的驱动器。但这在打包的驱动器中可能是太多要求? 对于 DRV8962、它看起来也是新的、并且我看不到任何人有库存。 我们将根据很快就会发货的情况进行演示。 关于您关于"加载"以改进波形的意见、是代码加载还是机械加载? 再次感谢 Murugavel。 您在回答时发挥了重要作用。
不用客气。 那么您是对的。 fstep 的最大规格确实为100kHz。 您会说"在我们先前的测试中、我们始终运行全步进(6667pps)、然后使用自动微步进1/256执行256步进速率@2000RPM。" 是的、这是 正确的 方法。 "使用自动微步进与在 STEP 输入中运行非常快的步进速率是否存在性能差异?"。 性能将是相同的。
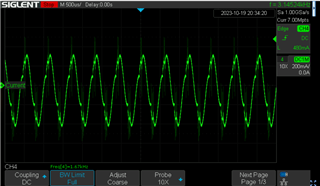
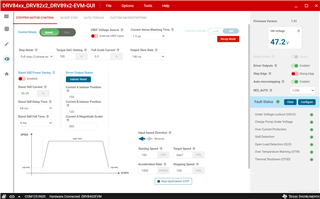
由于我以前的设置 仍然在我的实验室中、我根据以下屏幕截图使用 GUI 设置运行 EVM。 使用了 STDD 衰减模式。 性能与我之前的实验相同。
这里是2000 RPM 时的电流波形。
我希望您能够使用 DRV8962设计 PID 算法。 是的、这些是最近发布的产品。 "关于您关于"加载"以改进波形的意见、是代码加载还是机械加载?"。 我指的是机械负载。
您能否在结束时将此帖子标记为已解决? 对于将来的问题、您始终可以发布具有 合适主题标题的新问题。 我希望我们在这篇文章中的讨论将对这个论坛的其他几个用户有用。 谢谢!
请忽略我关于移除跳线短路并馈送外部 STEP 输入的评论。 这是不需要的。 此外、在该练习中、我不建议使用步进输入超过了其100kHz 的规格。 正如我在上一篇文章中提到的、使用自动微步进实现全步进模式和6667 PPS 是理想之选、可使用 DRV8462实现2000RPM。 我曾经提到过、使用自动微步进与使用1/256模式的这种方法的工作方式应该完全相同、并且在总体上没有性能差异(步进输入必须<= 100kHz)。 我希望这是合理的。
我用于测试的电机是 https://www.moonsindustries.com/p/am-series-standard-hybrid-stepper-motors/am17hdb410-01n-000004611110011162。 如果您查看该电机的扭矩速度曲线、您会发现它在电流下产生的额定扭矩比在48V 电压下测试时使用的 Nanotec 电机低得多。另请注意、 我将电流设置为0.5A、但电机可支持高达1.8A 的峰值电流。 这是因为在2000RPM 时产生的反电动势非常重要、足以将 A 和 B 相上的可用电压降低到无法通过线圈驱动大于0.5A 的电流的水平。 解决这个问题的另一种方法是使用更高的电机电源电压、例如55V 或60V。
尊敬的 Murugavel: 感谢您确认设置。 这回答了对我们的情况不同的任何怀疑。 由于我们没有创建相同的电流波形、我只能从中国订购一个电机。 它将在2周后到达、我将按照您的说明进行设置。 我会希望看到相同的结果、如果不看到、我将不得不查看评估板输出不同测量值的其他原因。 我真的很希望看到我们可以在这些更高的转速下创建一个正弦波。 我的确比较了电机扭矩曲线、而且我认为我们的3A 电机看起来真好、因为它的电阻为0.63欧姆、电感为1.03mH……即使我将电流从0.5A 移至额定电流、我也没有看到有前途的正弦结果。 在本课程中、我尝试过很多不同电压和电流水平的电机、它们具有不同的电感、我也没有创建出您可以看到的干净电机。 因此、我必须等待该卫星电机...时间将告诉您。 感谢您的持续帮助。 如果有人有任何想法要分享,我非常愿意与你分享。
感谢您的更新。 我必须要提到的是、我针对 MOON 电机获得的波形在2000 RPM 时都不完美。 但是、我能够使用 MOON 步进电机和合理的扭矩输出实现2000 RPM 的运行速度。 电机的反电动势常数也会导致高转速时的电流失真。 反电动势越高、在高 RPM 时的影响就越糟糕。
我想问一下、需要如此高 RPM 的最终应用是什么? 根据我在如此高的 RPM 下使用工业电机驱动的经验、具有编码器的 BLDC 电机将是实现可靠位置控制的正确解决方案。 步进电机主要为开环位置控制而设计、通常只有几百 RPM。
尊敬的 Murugavel: 了解了波形不理想、尽管至少根据您分享的图像来看、您的测试台场景似乎运行得更好。 我将在下面介绍3A、70 μ H 输入电压、1uH 电机。 尽管我无法在0.5A 实现速度、但设置是相同的(3A 与2A 的比较)。 我必须提高到2A 才能在1/256步进达到2000RPM。 然后、我在输出端放置了一个2A、113oz-in 电机、并以0.5A 的电流设置运行。 结果如下。 在这两种情况下、我都必须手动将目标速度增加到6667。 通常、使用用户设置、可以达到最高约4000个目标速度的速度。 之后、我必须逐步改变目标速度(4,500,5005000530530057057006000、 6,300,65065006667)...no战略不大、但我无法将6667设置为目标速度、并且 GUI 不会拖延地提高到该速度。 您曾提到它需要线性加速度斜坡、因此我认为 GUI 不会以线性方式斜升? 对于您的最后一个问题、我们知道我谈到的速度已有一段时间处于步进电机的极限应用状态。 我们公司在我们租赁的产品中部署步进电机、在我们的用例中、我们运行步进电机更像 BLDC、并且选择这样做是因为模块上的操作有非常具体的情况、我们不值得为工程、成本计算、库存 客户支持等
不过、我们想要的是整个速度范围内用于相电流的非常干净的正弦波、我们在某些模块应用中会受益匪浅。 问得好、非常感谢您的提问。 目前、我订购了 Moons 电机、并预计在几周内...以及一个大于4Mhz 的电流探针。 您对能够查看1/256步进的分钟波形而不被噪音淹没有何看法? -加油打气
感谢您分享这些详细信息。 谢谢你。
"之后、我必须逐步改变目标速度(4,500,5005000530530057057006000、 6,300,65065006667)...no战略不大、但我无法将6667设置为目标速度、并且 GUI 不会拖延地提高到该速度。 您曾提到它需要线性加速度斜坡、因此我认为 GUI 不会以线性方式斜升?"。 实际上、GUI 会执行线性斜坡。 速度根据加速度参数每32ms 更新一次。 PPS/s 中的加速度参数可设置得非常低、以实现与手动系统配置设置类似的系统配置。 对于您测试的电机而言、32ms 内的更新可能过快。
"我们所追求的是整个速度范围内相电流的非常干净的正弦波"在使用传统斩波调节开关驱动器的高转速下、这将成为一个技术挑战。 这将是您在成本与性能之间的折衷。
"以及大于4Mhz 的电流探头。 您对能够在不被噪音淹没的情况下观看1/256步的分波形有何看法?"。 我使用的是2.5 MHz 电流探针、能够捕捉到256 ustep 电流波形切换。 电机电感在 mH 范围内、因此我预计不会漏掉超快尖峰等。 您应该使用4 MHz 电流探头检查良好、
更新:我们收到了 Moons 电机并进行了测试。 我发现我们可以产生类似的结果你的 Murugavel。 在0.5A 时、我们能够在2000RPM 时产生相当好的电流正弦波、而在较低的速度(500RPM、1000RPM)时也能产生正弦波。 对于该电机、我注意到的一点是、我能够从静止状态运行到目标速度2000RPM。 我从未能够使用到目前为止我测试过的任何其他电机。 我认为这是一个偶然的机会,或者是部件的组合 used...it 是相当奇怪的,我认为我找到了黄金,但那种感觉是短暂的生活。
我没有看到我们使用这种电机、因为我无法以高于几百 RPM 的速度成功地以更高的扭矩运行它。 我认为这与您对 BackEmf 的意见以及电机的构建相关。 感谢您在所有这些测试中提供的意见和帮助。 我认为出于我们的目的和意图、我们将使用 DRV8962EVAL 开始开发、并准备创建固件和 PCB 设计来遵循。 我会看到该线程已关闭。 请提供您可能有的任何其他意见,我总是愿意学习,到目前为止,我们还没有想出这一点。 我们将借助 DRV8462进行(非 FOC)开发、并随时学习。 我们了解到的任何适用于 DRV8962的知识都将被利用。 *如果有任何人有足够的时间来购买 DRV8962的数量,我渴望听到消息。 谢谢!
感谢更新并关闭此主题。 在2000 RPM 时,反电动势是主要的威慑力量。 不仅能够在不失速的情况下运行、而且能够生成扭矩来应对工作负载。 具有较低反电动势恒定电流阱的电机。 否则、您必须以更高的电压驱动步进器、以便线圈上有足够的电压来克服反电动势。 DRV8462可支持高达65V 的电压。我也遇到过100V 驱动器。 根据我的经验、与去 FOC 相比、使用更高电压的情况下成功率更高。 FOC 的成本可能会让您接近于使用 BLDC。
也就是说、您可以尝试为现有电机的每个相位添加串联电阻(已知会为您的应用生成必要的转矩)、例如每个相位上的5欧姆或10欧姆、因此电机总共使用两个电阻器。 请记住电阻器中的功率耗散 I2R、并使用额定类型。 这些电阻器可减小反电动势振幅并提高 L/R 时间常数。 它们还能同等地降低线圈的驱动电压、但会存在一个合适的有效点、从而可能会因您的应用而切断线圈的驱动电压。 值得一试。
此致、Murugavel。