请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1EVM 主题中讨论的其他器件: DRV8889-Q1
这是关于驱动步进电机时的输出电流的查询。
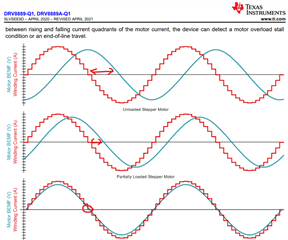
我想介绍一下在 DRV8889-Q1EVM 步进电机驱动条件下低速和高速驱动时发生的电流波形。
驱动输入电压:12[V],步进电机的电流限值:500[mA]当驱动时,线圈输出如下所示的波形。 这里比较了根据不同速度施加的电流的波形。
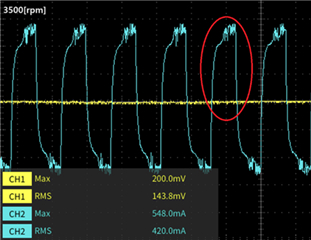
1.3500转/分
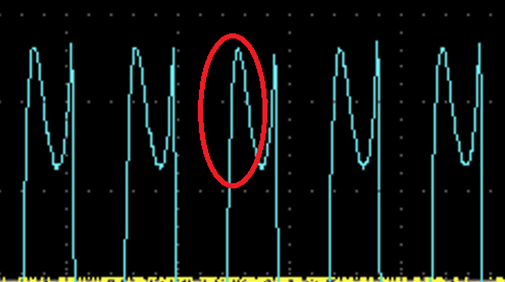
2.39转/分
3.5400转/分
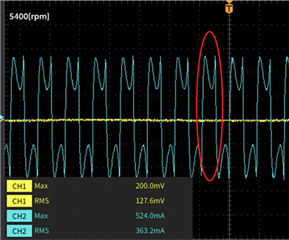
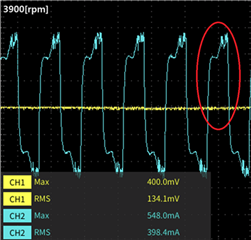
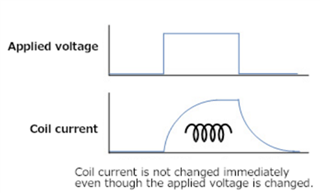
我知道电流波形3500~3900[rpm]。 这是因为随着速度的增加、施加到线圈上的电流的波形会因绕组电感而发生变化。
![]()

* www.pulsemotor.com/.../stepping-motor-drive-IC_04.html
然而,在5400[rpm]时,电流波形显示了3500~3900[rpm]的不同特征。 所施加电流的前面部分应进行衰减、而不是显示接近限流的尺寸。
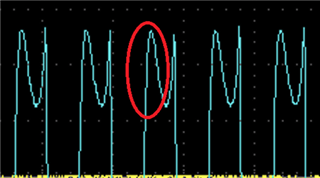
随着速度增加、电感和反电动势电压增加、因此施加到步进电机的电流大小应减小、而不是显示出相反的趋势。
您能解释一下出现这种现象的原因吗?
-驱动器是否施加升压电压?
- 说明了如何禁用和测试增压功能
- 请求增压功能的工作条件和原理
- 根据升压功能操作比较绕组输入值差异。