请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316AEVM 主题中讨论的其他器件:MCF8316A、 MOTORSTUDIO、 MCF8329A
大家好、支持人员
我们刚刚收到上述 EVM、并已将 USB、12V 电源和已知良好的无刷电机连接到该 EVM。
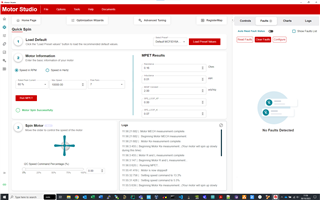
我们已运行 MCF8316A_GUI/ver/1.1.9并按照说明旋转电机、但电机不会旋转。
LED 和电源、开关位置、跳线位置均为标称值。
我们可以看到、当我们转动 Pot R4时、J6速度跳线上的电压(0至3.3V)发生变化、但电机未在模拟模式下旋转。
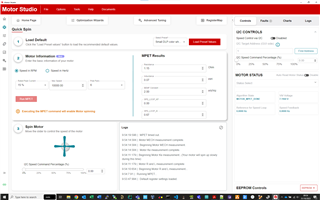
如果我们切换到 I2C 速度控制模式、则在 SDA 或 SCL 线路上看不到任何活动、并且电机不运转。
当我们尝试读取 EEPROM 时、I2C 线路上也没有活动、当我们尝试驱动电机时、到电机的 ABC 输出上也没有活动。
您能提供建议吗?
谢谢