请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 专家、您好!
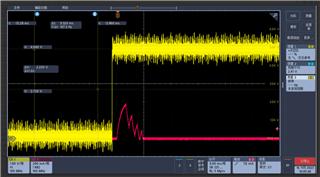
在我的设计中、DRVOFF 通过10k 电阻器下拉至 GND。 当 MCU 上拉 nsleep 时、我们会发现 A/Boutx 上有输出浪涌电流。 为什么以及如何改进?
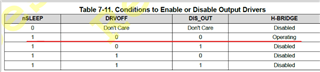
我在数据表中发现、只有当 nsleep=1、DRVOFF=0和 DIS_OUT=0时、H 桥才能输出、因此 上电时 DIS_OUT 的默认值似乎是1。 这似乎不合理