

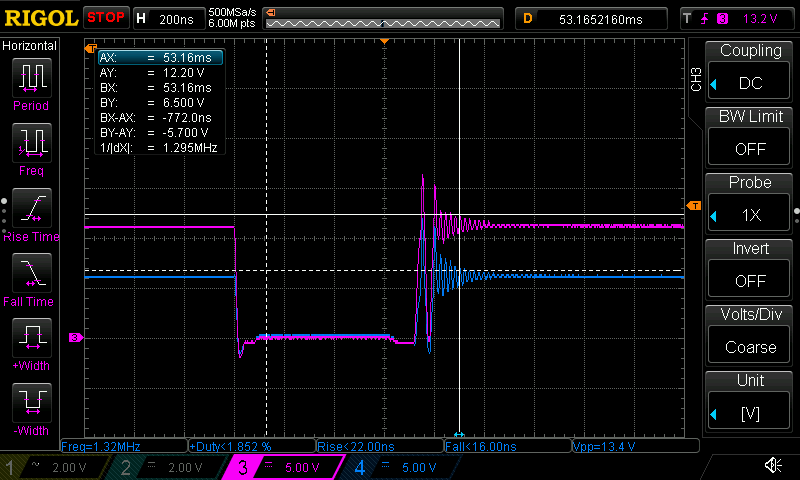
当我以2A 的负载电流运行 LM3150控制器时、晶体管门和"SW"引脚上会出现高频振荡。
当我将输入电压升高到特定值时、这些振荡会令人吃惊。 该值取决于 MOSFET 晶体管。 在该值之后、如果我将输入电压升高1-2 V、则 A amlitude 和该振荡的持续时间增加、那么运行将变得不稳定、并且 higt 侧 MOSFET 将被破坏。
当我在两侧运行带有 IRLML0030的控制器时、该值约为22V
然后、我更改了销毁的高侧 MOSFET、并在低侧使用 IRLML0030、在高侧使用 IRFR1205、并在不发生高达25V 目标电压振荡的情况下达到正常属性运行。
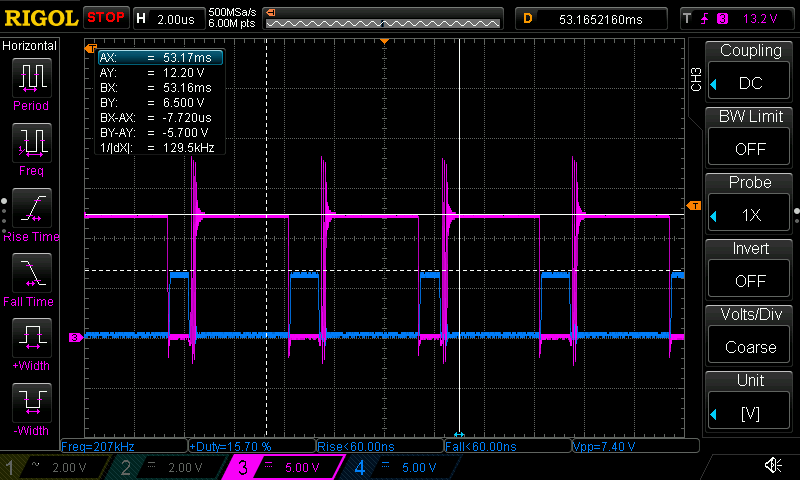
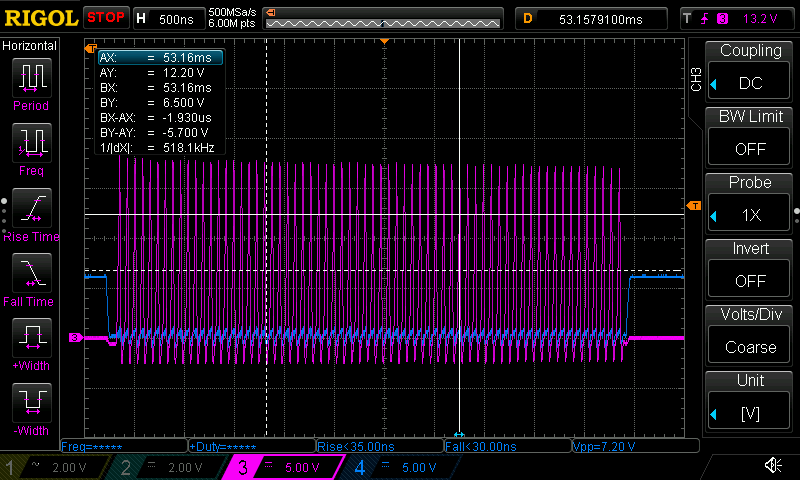
当我在高侧使用 IRLML0030、在低侧使用 IRFR1205时、输入电压的"临界"值被降至7V。 下面是此测试的波形(粉色图是高侧 MOSFET 的栅极、蓝色图是 SW 引脚):
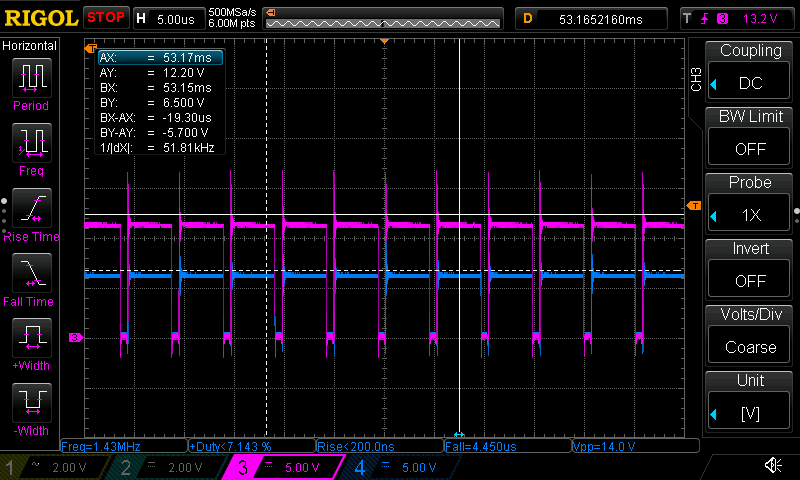
在 "临界"输入电压下、低侧栅极(蓝色)和高侧栅极(粉色)相对于 GND 的波形:
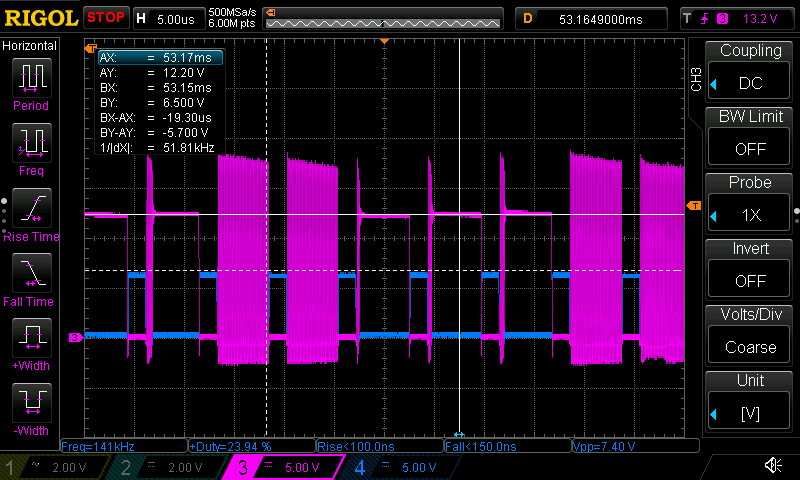
相对于 高于"临界"输入电压的 GND 的低侧栅极(蓝色)和高侧栅极(粉色)波形:
根据数据表、这两种类型的晶体管都适合用于此工作模式(Vin=6...25V;Iout = 2A;Vout=5V;开关频率= 200kHz)。 我不明白他们有什么问题。
当我尝试安装与低侧 MOSFET 并联的散射二极管时、控制器开始使用基于配置的任何晶体管配置、并在输入电压的所有范围内使两侧均具有 IRLML0030。 但我找不到任何信息表明它对操作的稳定性有如此大的影响。
安装附加的1uF bosst 陶瓷电容和470uF 电解输出电容不会发生任何变化。
这种影响还取决于负载电流-在200mA 等较低负载电流的情况下、不会产生这种影响。
PCB 顶部: https://yadi.sk/i/7yLDyYhx3aGUWV
PCB 机器人: https://yadi.sk/i/bi6b8vvK3aGUW3
Gerbers: https://yadi.sk/d/jpwujzeI3aGUXH
原理图: https://yadi.sk/i/n_vMb7YI3aGSTu
除此之外、我还在5V 输出端添加了10uF 陶瓷电容器。 将 R6更改为300kOhm、以实现200kHz 的开关频率。
