请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TPS7A19 主题中讨论的其他器件: TPS7B82-Q1、 TPS7B68-Q1
尊敬的先生:
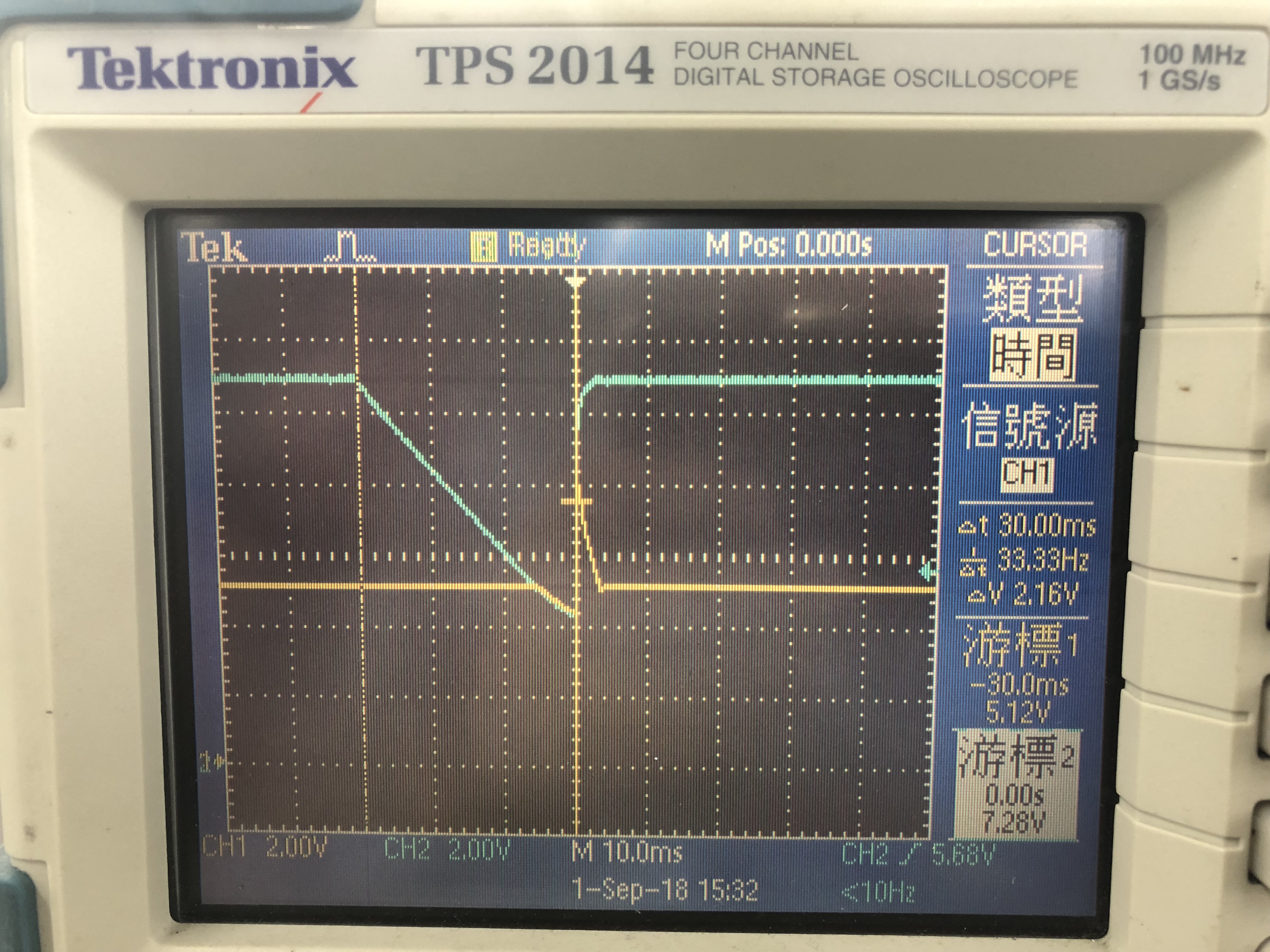
我们在 摩托车应用中使用了 TPS7A19。 它的输入电压为来自铅酸电池的12V、输出电压为5V 至 MCU。 当我们立即启动发动机时、12V 电压将降至5V 以下。 当 Vin 恢复到12V 时,Vout 将高达8V,该 Vout 可能会损坏我们的 MCU。 TI 是否有任何建议? 增大输入 电容? 下面是波形(黄色线是 Vout、蓝色线是 Vin)和原理图、供您参考。