

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432BOOST Thread 中讨论的其他器件:MMWAVE-L-SDK
工具与软件:
尊敬的 TI 专家:
我们使用的配置为2TX 3Rx、64个线性调频脉冲和128个样本、因此原始 ADC 为 (NUM_TX、NUM_RX、NUM_ CHIRPS、ADC_SAMPLE)=(2、3、 64,128)。
根据我的理解、雷达立方体是距离 FFT 结果、因此雷达立方体的形状为 (NUM_TX、NUM_RX、NUM_线性调频脉冲、RANGE_BIN)=(2、3、 64、64)。
我们使用自动模式来收集主要和次要雷达立方体。 以下是我的理解:
1.主要运动雷达立方体:当前帧的距离 FFT
次要运动雷达立方体:多帧的距离 FFT
- 在我们的雷达配置中、主要/次要雷达立方体的形状

示例
似乎有两个参数用于控制次要雷达立方体
![]()
我们尝试了两个设置。 不过、我们的目标设置没有行为
运转相当正常
- (numFrmPerMinorMotProc、numMinorMotionChirpsPerFrame)=(64、1):
次要雷达立方体中有64个帧、每个毫米波大小
帧需要1个线性调频脉冲 - (numFrmPerMinorMotProc、numMinorMotionChirpsPerFrame)=(32、2):
次要雷达立方体中有32个帧、每个毫米波都在那里
帧需要2个线性调频脉冲。
消息流 次要设置:32帧、2个线性调频脉冲

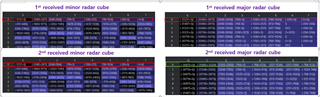
- 雷达立方体生成的空间矢量
- (行1、行2)=第1个接收到的主要雷达立方体的(行1、行2)
- 雷达立方体生成的空间矢量
- (行1、行2)=第1个接收到的主要雷达立方体的(行1、行2)
- 第2个接收到的次要雷达立方体的(行3、行4)=第2个接收到的主要雷达立方体的(行1、行2)
这种行为正如预期的那样:次要雷达立方体将填充主要雷达立方体的前两个线性调频脉冲
不过、在使用64帧时、1个线性调频脉冲
- 雷达立方体生成的空间矢量
- (行1、行2)=第1个接收到的主要雷达立方体的(行1、行2)
- 第1个接收到的次要雷达立方体=第2个接收到的次要雷达立方体。
- 这不符合预期。 第2个接收的次要雷达立方体没有来自第2个接收的主要雷达立方体的任何信息
我的理解是否正确?
是否可以 将 numMinorMotionChirpsPerFrame 配置为1? 设置为1时、根据我们的观察结果、次要雷达立方体不是每一帧更新一次、而是每2帧更新一次。
我将非常感谢专家的任何帮助。
此致!
金世镐

