请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TIDM-BUCKBOOST-BIDIR 你好。
我们正在开发锂离子电池充电器,我们将TIDM-BUCKBOOST-BIDIR参考设计作为起点,因为它满足了我们的大多数要求。
我想更好地了解与工作周期计算方式相关的一些事项。 以下是我的疑虑(假设它是闭环操作和正向模式):
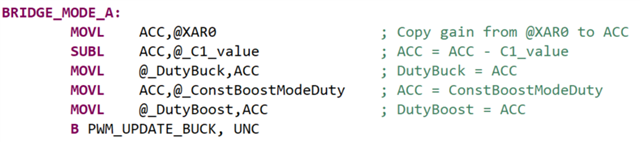
-首先,为什么在计算占空比之前用_DPL_Func中的占空比变量乘以2 (它在汇编代码中作为一个班次实现:LSL ACC,#1)? 我知道在闭环操作下,它只是在环路中的增益,但它是否有特定的原因?
@是否真的需要在每个模式的开头执行MOVL ACC,n ü r XAR0?
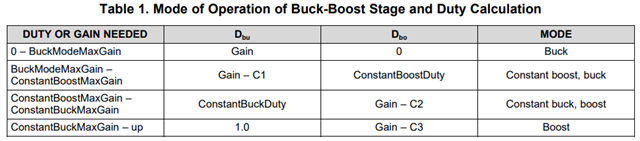
-您能否解释一下为什么要将其与常量C1,C2和C3结合使用,而不是使用更简单的除法来实现预期增益(基于Vo/VI=dBu/(1-dbo))? 是否要避免因所涉及的CPU负载而产生的分区? 此外,如何获得这些系数? 我看到了电子表格,但我不理解流程。 我们是否应该尝试这些系数的不同值并查看每个情况的效率,或者是否有更有条理的方法来继续?
提前感谢您的参与。