


主题中讨论的其他器件: AMC1306EVM、 C2000WARE、 CDCE906、 AMC1306M25
早上好。
我想知道我是否能获得一些关于我遇到的问题的建议。
最终目标是运行 TIDA-00080参考设计。
首先、我尝试使用 AMC1306EVM 研究了性能。
我使用了我在 MCU (F280049)中从 PWM 生成的时钟信号。
我还使用了 SDFM 的修改示例代码(C2000Ware_4_01_00_00\driverlib\f28004x\examples\sdfm\sdfm_ex1_filter_sync_cpuread.c)
在本例中、我可以在 CCS 调试中看到时钟信号、数据信号和滤波器结果。
第二、我已经研究了 TIDA-00080设计。 我从文件中获取了 PCB、并且组装了大多数组件(不包括 FPGA 器件)
也重新配置了 CDCE906寄存器、我可以从那里获取时钟信号。
此时、我可以看到时钟信号作为 AMC1306的输入、而数据信号作为 AMC1306 IC 芯片的输出。
这是我得到的波形。
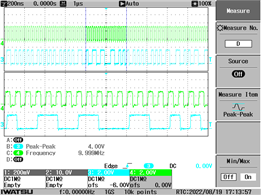
绿色脉冲是引脚7上的时钟信号(AMC1306M25上的 CLKIN)、10[MHz]
蓝色脉冲是引脚6上的数据信号(AMC1306M25上的 DOUT)
总之、我可以在 SDFM 侧获得正确的信号。
问题出在 MCU 侧。 我无法在调试会话中获取滤波器结果。 显示了所有0的值。
因此、我研究了代码、然后可以设置 MF1上的标志。
在技术参考手册中、有人说"当 SD-CX 丢失时会生成调制器故障(mfx)。"
我检查了分配为 SD1_C1的 GPBDAT/GPIO49、我可以实时看到交替值(0到1)。
因此我认为"时钟不会丢失"。 但仍然、MF1位被置位并停留在那个(我连接的代码上的第329行)点上。
我可以在 e2e.ti.com/.../tms320f28379d-using-sdfm-with-amc1305-evm"上找到与此问题相关的主题
但该线程的作者使用 PWM 作为时钟信号。 但我使用了一个外部信号、因此我无法遵循该线程的解决方案。
在这种情况下、我可以检查 SDFM 的正确中断是什么?
我随附了以下代码以供您参考。 我没有使用 TIDA-00080的 GUI 和固件、因为我不需要该功能。
感谢你的帮助。
此致。
//########################################################################### // // FILE: sdfm_ex1_filters.c // // TITLE: SDFM Filter sync CPU Example. // //! \addtogroup driver_example_list //! <h1> SDFM Filter Sync CPU</h1> //! //! In this example, SDFM filter data is read by CPU in SDFM ISR routine. The //! SDFM configuration is shown below: //! - SDFM used in this example - SDFM1 //! - Input control mode selected - MODE0 //! - Comparator settings //! - Sinc3 filter selected //! - OSR = 32 //! - HLT = 0x7FFF (Higher threshold setting) //! - LLT = 0x0000(Lower threshold setting) //! - Data filter settings //! - All the 4 filter modules enabled //! - Sinc3 filter selected //! - OSR = 128 //! - All the 4 filters are synchronized by using MFE //! (Master Filter enable bit) //! - Filter output represented in 16 bit format //! - In order to convert 25 bit Data filter //! into 16 bit format user needs to right shift by 8 bits for //! Sinc3 filter with OSR = 128 //! - Interrupt module settings for SDFM filter //! - All the 4 higher threshold comparator interrupts disabled //! - All the 4 lower threshold comparator interrupts disabled //! - All the 4 modulator failure interrupts disabled //! - All the 4 filter will generate interrupt when a new filter data //! is available. //! // //########################################################################### // // $Release Date: $ // $Copyright: // Copyright (C) 2013-2022 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //########################################################################### // // Included Files // #include "driverlib.h" #include "device.h" #include <stdio.h> // // Defines // #define MAX_SAMPLES 1024 // // Globals // int16_t filter1Result[MAX_SAMPLES]; int16_t filter2Result[MAX_SAMPLES]; int16_t filter3Result[MAX_SAMPLES]; int16_t filter4Result[MAX_SAMPLES]; #pragma DATA_SECTION(filter1Result, "Filter1_RegsFile"); #pragma DATA_SECTION(filter2Result, "Filter2_RegsFile"); #pragma DATA_SECTION(filter3Result, "Filter3_RegsFile"); #pragma DATA_SECTION(filter4Result, "Filter4_RegsFile"); // // Defines // #define SDFM_FILTER_ENABLE 0x2U // // Function Prototypes // void configureSDFMPins(void); void done(void); __interrupt void sdfm1ISR(void); __interrupt void sdfm2ISR(void); // // Main // void main(void) { uint16_t hlt, llt; // // Initialize device clock and peripherals // Device_init(); // // Setup GPIO by disabling pin locks and enabling pullups // Device_initGPIO(); // // Initialize PIE and clear PIE registers. Disables CPU interrupts. // Interrupt_initModule(); // // Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR). // Interrupt_initVectorTable(); // // Interrupts that are used in this example are re-mapped to // ISR functions found within this file. // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP5); Interrupt_register(INT_SD1, sdfm1ISR); Interrupt_register(INT_SD2, sdfm2ISR); // // Enable SDFM1 amd SDFM2 interrupts // Interrupt_enable(INT_SD1); Interrupt_enable(INT_SD2); // // Input Control Unit // // Configure Input Control Unit: Modulator Clock rate = Modulator data rate // SDFM_setupModulatorClock(SDFM1_BASE, SDFM_FILTER_1, SDFM_MODULATOR_CLK_EQUAL_DATA_RATE); SDFM_setupModulatorClock(SDFM1_BASE, SDFM_FILTER_2, SDFM_MODULATOR_CLK_EQUAL_DATA_RATE); SDFM_setupModulatorClock(SDFM1_BASE, SDFM_FILTER_3, SDFM_MODULATOR_CLK_EQUAL_DATA_RATE); SDFM_setupModulatorClock(SDFM1_BASE, SDFM_FILTER_4, SDFM_MODULATOR_CLK_EQUAL_DATA_RATE); // // Comparator Unit - over and under value threshold settings // hlt = 0x7FFF; llt = 0x0000; // // Configure Comparator Unit's comparator filter type and comparator's // OSR value, higher threshold, lower threshold // SDFM_configComparator(SDFM1_BASE, (SDFM_FILTER_1 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(32)), (SDFM_GET_LOW_THRESHOLD(llt) | SDFM_GET_HIGH_THRESHOLD(hlt))); SDFM_configComparator(SDFM1_BASE, (SDFM_FILTER_2 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(32)), (SDFM_GET_LOW_THRESHOLD(llt) | SDFM_GET_HIGH_THRESHOLD(hlt))); SDFM_configComparator(SDFM1_BASE, (SDFM_FILTER_3 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(32)), (SDFM_GET_LOW_THRESHOLD(llt) | SDFM_GET_HIGH_THRESHOLD(hlt))); SDFM_configComparator(SDFM1_BASE, (SDFM_FILTER_4 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(32)), (SDFM_GET_LOW_THRESHOLD(llt) | SDFM_GET_HIGH_THRESHOLD(hlt))); // // Data Filter Unit // // Configure Data Filter Unit - filter type, OSR value and // enable / disable data filter // SDFM_configDataFilter(SDFM1_BASE, (SDFM_FILTER_1 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(128)), (SDFM_DATA_FORMAT_16_BIT | SDFM_FILTER_ENABLE | SDFM_SHIFT_VALUE(0x0007))); //0x0008 SDFM_configDataFilter(SDFM1_BASE, (SDFM_FILTER_2 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(128)), (SDFM_DATA_FORMAT_16_BIT | SDFM_FILTER_ENABLE | SDFM_SHIFT_VALUE(0x0007))); SDFM_configDataFilter(SDFM1_BASE, (SDFM_FILTER_3 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(128)), (SDFM_DATA_FORMAT_16_BIT | SDFM_FILTER_ENABLE | SDFM_SHIFT_VALUE(0x0007))); SDFM_configDataFilter(SDFM1_BASE, (SDFM_FILTER_4 | SDFM_FILTER_SINC_3 | SDFM_SET_OSR(128)), (SDFM_DATA_FORMAT_16_BIT | SDFM_FILTER_ENABLE | SDFM_SHIFT_VALUE(0x0007))); // // Enable Master filter bit: Unless this bit is set none of the filter modules // can be enabled. All the filter modules are synchronized when master filter // bit is enabled after individual filter modules are enabled. // SDFM_enableMasterFilter(SDFM1_BASE); // // PWM11.CMPC, PWM11.CMPD, PWM12.CMPC and PWM12.CMPD signals cannot synchronize // the filters. This option is not being used in this example. // SDFM_disableExternalReset(SDFM1_BASE, SDFM_FILTER_1); SDFM_disableExternalReset(SDFM1_BASE, SDFM_FILTER_2); SDFM_disableExternalReset(SDFM1_BASE, SDFM_FILTER_3); SDFM_disableExternalReset(SDFM1_BASE, SDFM_FILTER_4); // // Enable interrupts // // Following SDFM interrupts can be enabled / disabled using this function. // Enable / disable comparator high threshold // Enable / disable comparator low threshold // Enable / disable modulator clock failure // Enable / disable data filter acknowledge // SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_1, (SDFM_MODULATOR_FAILURE_INTERRUPT | SDFM_DATA_FILTER_ACKNOWLEDGE_INTERRUPT)); /* SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_2, (SDFM_MODULATOR_FAILURE_INTERRUPT | SDFM_DATA_FILTER_ACKNOWLEDGE_INTERRUPT)); SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_3, (SDFM_MODULATOR_FAILURE_INTERRUPT | SDFM_DATA_FILTER_ACKNOWLEDGE_INTERRUPT)); SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_4, (SDFM_MODULATOR_FAILURE_INTERRUPT | SDFM_DATA_FILTER_ACKNOWLEDGE_INTERRUPT)); */ SDFM_disableInterrupt(SDFM1_BASE, SDFM_FILTER_1, (SDFM_HIGH_LEVEL_THRESHOLD_INTERRUPT | SDFM_LOW_LEVEL_THRESHOLD_INTERRUPT)); SDFM_disableInterrupt(SDFM1_BASE, SDFM_FILTER_2, (SDFM_HIGH_LEVEL_THRESHOLD_INTERRUPT | SDFM_LOW_LEVEL_THRESHOLD_INTERRUPT)); SDFM_disableInterrupt(SDFM1_BASE, SDFM_FILTER_3, (SDFM_HIGH_LEVEL_THRESHOLD_INTERRUPT | SDFM_LOW_LEVEL_THRESHOLD_INTERRUPT)); SDFM_disableInterrupt(SDFM1_BASE, SDFM_FILTER_4, (SDFM_HIGH_LEVEL_THRESHOLD_INTERRUPT | SDFM_LOW_LEVEL_THRESHOLD_INTERRUPT)); // // Enable master interrupt so that any of the filter interrupts can trigger // by SDFM interrupt to CPU // SDFM_enableMasterInterrupt(SDFM1_BASE); // // Enable Global Interrupt (INTM) and realtime interrupt (DBGM) // EINT; ERTM; // // Wait for an interrupt // while(1); } // // sdfm1ISR - SDFM 1 ISR // __interrupt void sdfm1ISR(void) { static uint16_t loopCounter1 = 0; SDFM_setOutputDataFormat(SDFM1_BASE, SDFM_FILTER_1, SDFM_DATA_FORMAT_16_BIT); SDFM_setOutputDataFormat(SDFM1_BASE, SDFM_FILTER_2, SDFM_DATA_FORMAT_16_BIT); SDFM_setOutputDataFormat(SDFM1_BASE, SDFM_FILTER_3, SDFM_DATA_FORMAT_16_BIT); SDFM_setOutputDataFormat(SDFM1_BASE, SDFM_FILTER_4, SDFM_DATA_FORMAT_16_BIT); if(loopCounter1 >= MAX_SAMPLES) { // // Reset the counter. Add breakpoint at below statement to view the // filter results in graph view. // loopCounter1 = 0; // // // // Software breakpoint to view results. // // Hit run again to get updated conversions. // // Uncomment to halt the execution once buffer is full. // // // ESTOP0; } // // Read SDFM flag register (SDIFLG) // while((HWREG(SDFM1_BASE + SDFM_O_SDIFLG) & 0x1000) != 0x1000) //0xF000U { } // // Read each SDFM filter output and store it in respective filter // result array // filter1Result[loopCounter1] = (int16_t)(SDFM_getFilterData(SDFM1_BASE, SDFM_FILTER_1) >> 16U); filter2Result[loopCounter1] = (int16_t)(SDFM_getFilterData(SDFM1_BASE, SDFM_FILTER_2) >> 16U); filter3Result[loopCounter1] = (int16_t)(SDFM_getFilterData(SDFM1_BASE, SDFM_FILTER_3) >> 16U); filter4Result[loopCounter1++] = (int16_t)(SDFM_getFilterData(SDFM1_BASE, SDFM_FILTER_4) >> 16U); // // Clear SDFM flag register (SDIFLG) // SDFM_clearInterruptFlag(SDFM1_BASE, SDFM_MASTER_INTERRUPT_FLAG | 0xFFFF); // // Acknowledge this __interrupt to receive more __interrupts from group 5 // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP5); } // // sdfm2ISR - SDFM 2 ISR // __interrupt void sdfm2ISR(void) { uint32_t sdfmReadFlagRegister = 0; static uint16_t loopCounter1 = 0; SDFM_setOutputDataFormat(SDFM2_BASE, SDFM_FILTER_1, SDFM_DATA_FORMAT_16_BIT); SDFM_setOutputDataFormat(SDFM2_BASE, SDFM_FILTER_2, SDFM_DATA_FORMAT_16_BIT); SDFM_setOutputDataFormat(SDFM2_BASE, SDFM_FILTER_3, SDFM_DATA_FORMAT_16_BIT); SDFM_setOutputDataFormat(SDFM2_BASE, SDFM_FILTER_4, SDFM_DATA_FORMAT_16_BIT); // // Read SDFM flag register (SDIFLG) // sdfmReadFlagRegister = HWREG(SDFM2_BASE + SDFM_O_SDIFLG); if(loopCounter1 < MAX_SAMPLES) { // // Read each SDFM filter output and store it in respective filter // result array // filter1Result[loopCounter1] = (int16_t)SDFM_getFilterData(SDFM2_BASE, SDFM_FILTER_1); filter2Result[loopCounter1] = (int16_t)SDFM_getFilterData(SDFM2_BASE, SDFM_FILTER_2); filter3Result[loopCounter1] = (int16_t)SDFM_getFilterData(SDFM2_BASE, SDFM_FILTER_3); filter4Result[loopCounter1++] = (int16_t)SDFM_getFilterData(SDFM2_BASE, SDFM_FILTER_4); // // Clear SDFM flag register // SDFM_clearInterruptFlag(SDFM2_BASE, (SDFM_MASTER_INTERRUPT_FLAG | 0xFFFF)); sdfmReadFlagRegister = HWREG(SDFM2_BASE + SDFM_O_SDIFLG); if(sdfmReadFlagRegister != 0x0) { ESTOP0; } } else { ESTOP0; done(); } // // Acknowledge this __interrupt to receive more __interrupts from group 5 // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP5); } // // configureSDFMPins - Configure SDFM GPIOs // void configureSDFMPins(void) { uint16_t pin; for(pin = 48; pin <= 55; pin++) { GPIO_setDirectionMode(pin, GPIO_DIR_MODE_IN); GPIO_setMasterCore(pin, GPIO_CORE_CPU1); GPIO_setPadConfig(pin, GPIO_PIN_TYPE_STD); GPIO_setQualificationMode(pin, GPIO_QUAL_ASYNC); } GPIO_setPinConfig(GPIO_48_SD1_D1); GPIO_setPinConfig(GPIO_49_SD1_C1); GPIO_setPinConfig(GPIO_50_SD1_D2); GPIO_setPinConfig(GPIO_51_SD1_C2); GPIO_setPinConfig(GPIO_52_SD1_D3); GPIO_setPinConfig(GPIO_53_SD1_C3); GPIO_setPinConfig(GPIO_54_SD1_D4); GPIO_setPinConfig(GPIO_55_SD1_C4); /* for(pin = 28; pin <= 29; pin++) { GPIO_setDirectionMode(pin, GPIO_DIR_MODE_IN); GPIO_setMasterCore(pin, GPIO_CORE_CPU1); GPIO_setPadConfig(pin, GPIO_PIN_TYPE_STD); GPIO_setQualificationMode(pin, GPIO_QUAL_ASYNC); } GPIO_setPinConfig(GPIO_28_SD2_D3); GPIO_setPinConfig(GPIO_29_SD2_C3); */ } // // done - Function to halt debugger and stop application // void done(void) { asm(" ESTOP0"); for(;;); } // // End of file //
