请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-CC1352R1 主题中讨论的其他部件:CC1312R、 SysConfig
您好!
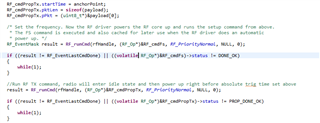
我使用 CC1352R1上的低于1GHz 射频来实现两个 CC1352R1评估板之间的时间同步并发送时序信号。 我使用的是 TI-RTOS 和 SDK 版本6.20.00.29。 同步时钟后、我计算下一次需要发送计时信号的时间。 然后、我使用来自 TI-RTOS 时钟模块的时钟对象(在这里进行了解释: 《TI-RTOS 内核(SYS/BIOS)用户指南》、第5.2节)、输入计算的时间、直到下一次需要将信号作为超时发送到时钟对象。 然后、我在时钟对象上使用一个周期来触发回调函数、该函数在 IO 引脚上输出其余时序信号的信号。
我负责处理由于射频通信和处理开销引起的任何延迟延迟、但我看到时钟模块和 GPIO 引脚的输出抖动为5 - 10微秒。
是否有任何方法可以将此抖动降至1微秒以下? 为了减少时钟模块和 GPIO 模块的这种抖动、我是否可以对代码或 TI-RTOS 进行任何更改或性能改进? 我将输出与之进行比较的信号是抖动小于25纳秒的硬接线信号、因此微秒级的任何抖动都不是源信号造成的。