

f28335自带adc采集到的波形放在1024大小的数组里面,用的例程,通过graph看到的波形有相位抖动,较严重,10k的信号每个周期都有,500k的几个周期有个一代码如下,请问是什么原因造成的。adc外围硬件电路按照TI的硬件指南设计的。输入信号Vpp为120mV,正弦波。
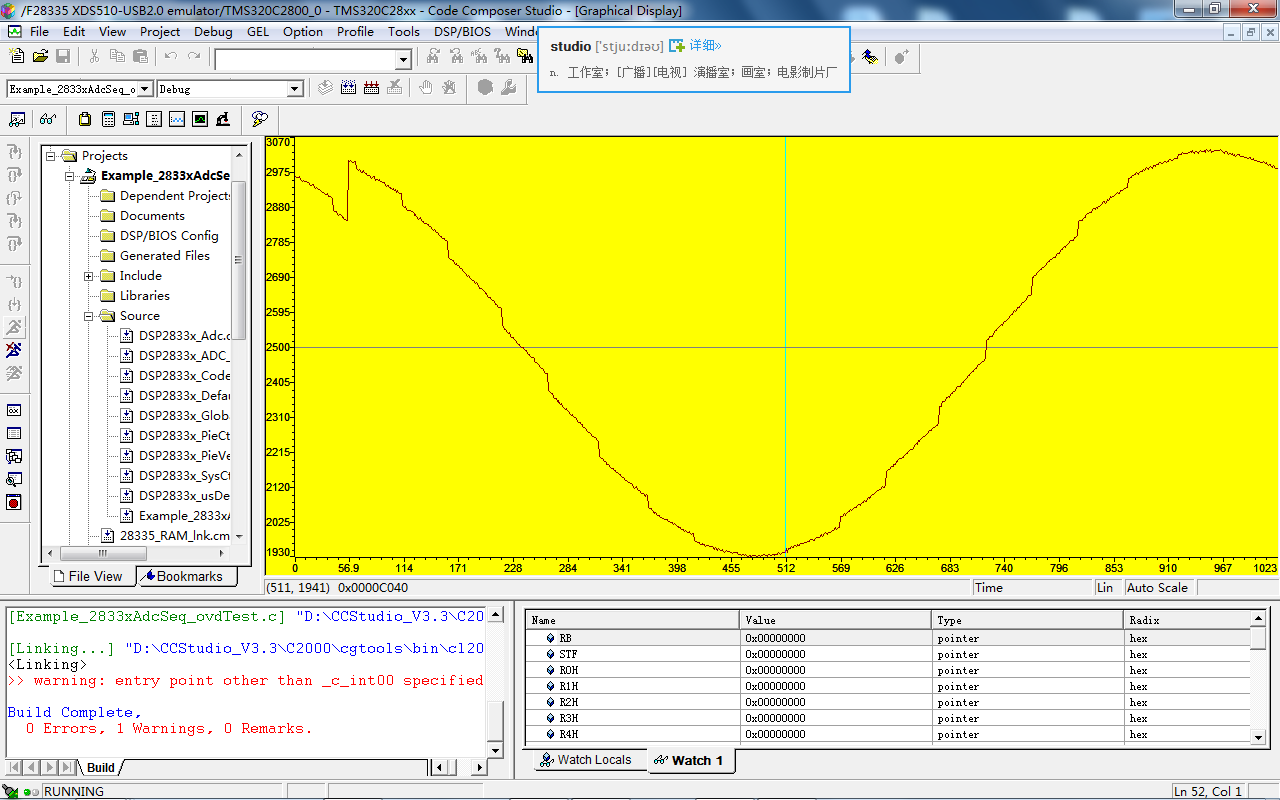
1k的波形,左边有明显的相位抖动。
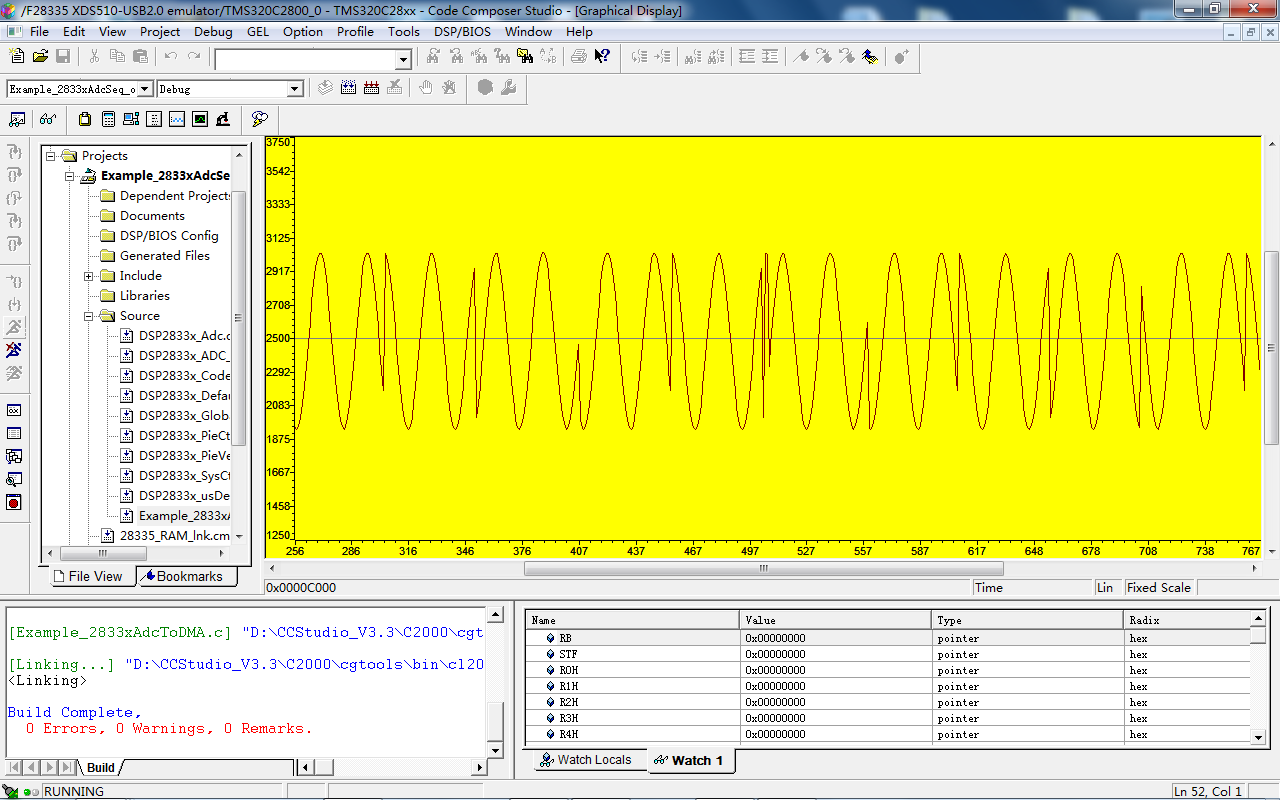
500k的波形,几个周期一个较大的抖动。
请问如何解决谢谢。
如下是代码,顺序模式的override模式。pll为sysclk150MHz。
#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
// ADC start parameters
#if (CPU_FRQ_150MHZ) // Default - 150 MHz SYSCLKOUT
#define ADC_MODCLK 0x3 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 150/(2*3) = 25.0 MHz #endif
#if (CPU_FRQ_100MHZ)
#define ADC_MODCLK 0x2 // HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 100/(2*2) = 25.0 MHz #endif
#define ADC_CKPS 0x0 // ADC module clock = HSPCLK/1 = 25.5MHz/(1) = 25.0 MHz
#define ADC_SHCLK 0x1 // S/H width in ADC module periods = 2 ADC cycle #define AVG 1000 // Average sample limit #define ZOFFSET 0x00 // Average Zero offset
#define BUF_SIZE 1024 // Sample buffer size// Global variable for this example Uint16 SampleTable[BUF_SIZE];
main() { Uint16 i; Uint16 array_index;
// Step 1. Initialize System Control: // PLL, WatchDog, enable Peripheral Clocks // This example function is found in the DSP2833x_SysCtrl.c file. InitSysCtrl();
// Specific clock setting for this example: EALLOW; SysCtrlRegs.HISPCP.all = ADC_MODCLK; // HSPCLK = SYSCLKOUT/ADC_MODCLK EDIS;
// Step 2. Initialize GPIO: // This example function is found in the DSP2833x_Gpio.c file and // illustrates how to set the GPIO to it's default state. // InitGpio(); // Skipped for this example // Enable the pin GPIO34 as output EALLOW; GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0; // GPIO pin GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1; // Output pin EDIS;
// Step 3. Clear all interrupts and initialize PIE vector table: // Disable CPU interrupts DINT;
// Initialize the PIE control registers to their default state. // The default state is all PIE interrupts disabled and flags // are cleared. // This function is found in the DSP2833x_PieCtrl.c file. InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags: IER = 0x0000; IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR). // This will populate the entire table, even if the interrupt // is not used in this example. This is useful for debug purposes. // The shell ISR routines are found in DSP2833x_DefaultIsr.c. // This function is found in DSP2833x_PieVect.c. InitPieVectTable();
// Step 4. Initialize all the Device Peripherals: // This function is found in DSP2833x_InitPeripherals.c // InitPeripherals(); // Not required for this example InitAdc(); // For this example, init the ADC
// Specific ADC setup for this example: AdcRegs.ADCTRL1.bit.ACQ_PS = ADC_SHCLK; // Sequential mode: Sample rate = 1/[(2+ACQ_PS)*ADC clock in ns] // = 1/(3*40ns) =8.3MHz (for 150 MHz SYSCLKOUT) // = 1/(3*80ns) =4.17MHz (for 100 MHz SYSCLKOUT) // If Simultaneous mode enabled: Sample rate = 1/[(3+ACQ_PS)*ADC clock in ns] AdcRegs.ADCTRL3.bit.ADCCLKPS = ADC_CKPS; AdcRegs.ADCTRL1.bit.SEQ_CASC = 1; // 1 Cascaded mode AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0; AdcRegs.ADCTRL1.bit.CONT_RUN = 1; // Setup continuous run
AdcRegs.ADCTRL1.bit.SEQ_OVRD = 1; // Enable Sequencer override feature AdcRegs.ADCCHSELSEQ1.all = 0x0; // Initialize all ADC channel selects to A0 AdcRegs.ADCCHSELSEQ2.all = 0x0; AdcRegs.ADCCHSELSEQ3.all = 0x0; AdcRegs.ADCCHSELSEQ4.all = 0x0; AdcRegs.ADCMAXCONV.bit.MAX_CONV1 = 0x7; // convert and store in 8 results registers
// Step 5. User specific code, enable interrupts:
// Clear SampleTable for (i=0; i<BUF_SIZE; i++) { SampleTable[i] = 0; }
// Start SEQ1 AdcRegs.ADCTRL2.all = 0x2000;
for(;;) { // Take ADC data and log them in SampleTable array
// Initalize the array index. This points to the current // location within the SampleTable
array_index = 0;
for (i=0; i<(BUF_SIZE/16); i++) { // Wait for int1 while (AdcRegs.ADCST.bit.INT_SEQ1== 0){} GpioDataRegs.GPBSET.bit.GPIO34 = 1; // Set GPIO34 for monitoring -optional
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1;
#if INLINE_SHIFT SampleTable[array_index++]= ( (AdcRegs.ADCRESULT0)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT1)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT2)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT3)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT4)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT5)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT6)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT7)>>4);
#endif //-- INLINE_SHIFT
#if NO_SHIFT || POST_SHIFT
SampleTable[array_index++]= ( (AdcRegs.ADCRESULT0)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT1)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT2)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT3)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT4)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT5)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT6)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT7));
#endif //-- NO_SHIFT || POST_SHIFT
while (AdcRegs.ADCST.bit.INT_SEQ1== 0){} GpioDataRegs.GPBCLEAR.bit.GPIO34 = 1; // Clear GPIO34 for monitoring -optional AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1;
#if INLINE_SHIFT
SampleTable[array_index++]= ( (AdcRegs.ADCRESULT8)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT9)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT10)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT11)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT12)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT13)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT14)>>4); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT15)>>4);
#endif //-- INLINE_SHIFT
#if NO_SHIFT || POST_SHIFT
SampleTable[array_index++]= ( (AdcRegs.ADCRESULT8)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT9)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT10)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT11)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT12)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT13)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT14)); SampleTable[array_index++]= ( (AdcRegs.ADCRESULT15)); #endif // -- NO_SHIFT || POST_SHIFT
}
#if POST_SHIFT // For post shifting, shift the ADC results // in the SampleTable buffer after the buffer is full. for (i=0; i<BUF_SIZE; i++) { SampleTable[i] = ((SampleTable[i]) >>4); } #endif // -- POST_SHIFT
GpioDataRegs.GPBCLEAR.bit.GPIO34 = 1; // Clear GPIO34 for monitoring -optional } }
//=========================================================================== // No more. //===========================================================================
