

使用TIDM-02008项目中软件锁相环的算法,该算法Solarlib.pdf中的理论介绍

simulink仿真参数:TTPLPFC_AC_FREQ为50Hz,TTPLPFC_CONTROL_ISR_FREQUENCY,lpf_b0和lpf_b1参数与TIDM-02008所使用的参数一致。


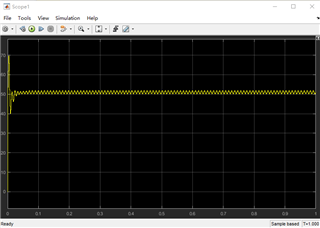
simulink仿真过程:输入51Hz频率的交流信号(50Hz交流电网中有可能出现的频率),看波形图是否能锁定,发现fo输出频率和q轴无法稳定下来。
simulink仿真内容:
function [sin_a,cos_a,fo_out,Q_out] = fcn(acValue,acFreq,isrFrequency,isrFrequencyMAX,lpf_b0,lpf_b1)
persistent sine;
if isempty(sine)
sine = 0.0;
end
sin_a = sine;
persistent cosine;
if isempty(cosine)
cosine = 0.0;
end
cos_a = cosine;
persistent cnt;
if isempty(cnt)
cnt = 0.0;
end
persistent fn;
if isempty(fn)
fn = acFreq;
end
persistent delta_t;
if isempty(delta_t)
delta_t = 1.0/isrFrequency;
end
persistent osg_coeff_osg_k;
if isempty(osg_coeff_osg_k)
osg_coeff_osg_k = 0.5;
end
persistent osg_coeff_osg_x;
if isempty(osg_coeff_osg_x)
wn = 2.0 * 3.14159265 * fn;
osg_coeff_osg_x = 2.0 * osg_coeff_osg_k * wn * delta_t;
end
persistent osg_coeff_osg_y;
if isempty(osg_coeff_osg_y)
wn = 2.0 * 3.14159265 * fn;
osg_coeff_osg_y = wn * delta_t * wn * delta_t;
end
persistent osg_coeff_osg_b0;
if isempty(osg_coeff_osg_b0)
osg_coeff_osg_b0 = osg_coeff_osg_x / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent osg_coeff_osg_b2;
if isempty(osg_coeff_osg_b2)
osg_coeff_osg_b2 = -osg_coeff_osg_x / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent osg_coeff_osg_a1;
if isempty(osg_coeff_osg_a1)
osg_coeff_osg_a1 = 2 * (4.0 - osg_coeff_osg_y) / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent osg_coeff_osg_a2;
if isempty(osg_coeff_osg_a2)
osg_coeff_osg_a2 = (osg_coeff_osg_x - osg_coeff_osg_y - 4) / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent osg_coeff_osg_qb0;
if isempty(osg_coeff_osg_qb0)
osg_coeff_osg_qb0 = osg_coeff_osg_k * osg_coeff_osg_y / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent osg_coeff_osg_qb1;
if isempty(osg_coeff_osg_qb1)
osg_coeff_osg_qb1 = 2 * osg_coeff_osg_k * osg_coeff_osg_y / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent osg_coeff_osg_qb2;
if isempty(osg_coeff_osg_qb2)
osg_coeff_osg_qb2 = osg_coeff_osg_k * osg_coeff_osg_y / (osg_coeff_osg_x + osg_coeff_osg_y + 4.0);
end
persistent lpf_coeff_b0;
if isempty(lpf_coeff_b0)
lpf_coeff_b0 = lpf_b0;
end
persistent lpf_coeff_b1;
if isempty(lpf_coeff_b1)
lpf_coeff_b1 = lpf_b1;
end
persistent u_0;
if isempty(u_0)
u_0 = 0.0;
end
persistent u_1;
if isempty(u_1)
u_1 = 0.0;
end
persistent u_2;
if isempty(u_2)
u_2 = 0.0;
end
persistent osg_u_0;
if isempty(osg_u_0)
osg_u_0 = 0.0;
end
persistent osg_u_1;
if isempty(osg_u_1)
osg_u_1 = 0.0;
end
persistent osg_u_2;
if isempty(osg_u_2)
osg_u_2 = 0.0;
end
persistent osg_qu_0;
if isempty(osg_qu_0)
osg_qu_0 = 0.0;
end
persistent osg_qu_1;
if isempty(osg_qu_1)
osg_qu_1 = 0.0;
end
persistent osg_qu_2;
if isempty(osg_qu_2)
osg_qu_2 = 0.0;
end
persistent u_Q_0;
if isempty(u_Q_0)
u_Q_0 = 0.0;
end
Q_out = u_Q_0;
persistent u_Q_1;
if isempty(u_Q_1)
u_Q_1 = 0.0;
end
persistent u_D_0;
if isempty(u_D_0)
u_D_0 = 0.0;
end
persistent ylf_0;
if isempty(ylf_0)
ylf_0 = 0.0;
end
persistent ylf_1;
if isempty(ylf_1)
ylf_1 = 0.0;
end
persistent fo;
if isempty(fo)
fo = 0.0;
end
fo_out = fo;
persistent theta;
if isempty(theta)
theta = 0.0;
end
if cnt >= isrFrequencyMAX
cnt = cnt - isrFrequencyMAX;
% Update the spll_obj->u[0] with the grid value
u_0 = acValue;
% Orthogonal Signal Generator
osg_u_0 = osg_coeff_osg_b0 * (u_0 - u_2) + osg_coeff_osg_a1 * osg_u_1 + osg_coeff_osg_a2 * osg_u_2;
osg_u_2 = osg_u_1;
osg_u_1 = osg_u_0;
osg_qu_0 = osg_coeff_osg_qb0 * u_0 + osg_coeff_osg_qb1 * u_1 + osg_coeff_osg_qb2 * u_2 + osg_coeff_osg_a1 * osg_qu_1 + osg_coeff_osg_a2 * osg_qu_2;
osg_qu_2 = osg_qu_1;
osg_qu_1 = osg_qu_0;
u_2 = u_1;
u_1 = u_0;
% Park Transform from alpha beta to d-q axis
u_Q_0 = cosine * osg_u_0 + sine * osg_qu_0;
u_D_0 = cosine * osg_qu_0 - sine * osg_u_0;
% Loop Filter
ylf_0 = ylf_1 + lpf_coeff_b0 * u_Q_0 + lpf_coeff_b1 * u_Q_1;
ylf_1 = ylf_0;
u_Q_1 = u_Q_0;
fo = fn + ylf_0;
theta = theta + (fo * delta_t) * (2.0 * 3.1415926);
if theta < 0
theta = 0;
end
if(theta > (2.0 * 3.1415926))
theta = theta - (2.0 * 3.1415926);
%theta = 0;
end
sin_a = sin(theta);
cos_a = cos(theta);
sine = sin_a;
cosine = cos_a;
end
cnt = cnt + 1;
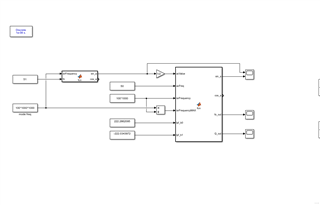
simulink仿真结果如下
q轴输出
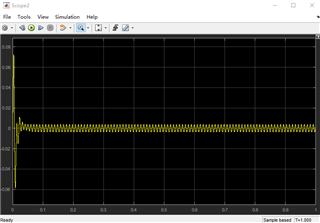
输出频率
为什么呢?是lpf_b0和lpf_b1参数不对吗?计算lpf_b0和lpf_b1表格中“Error Band”的具体含义是指什么意思?本人研究一段时间了,非常期待您们的回复!

