
{kind=link}

特点
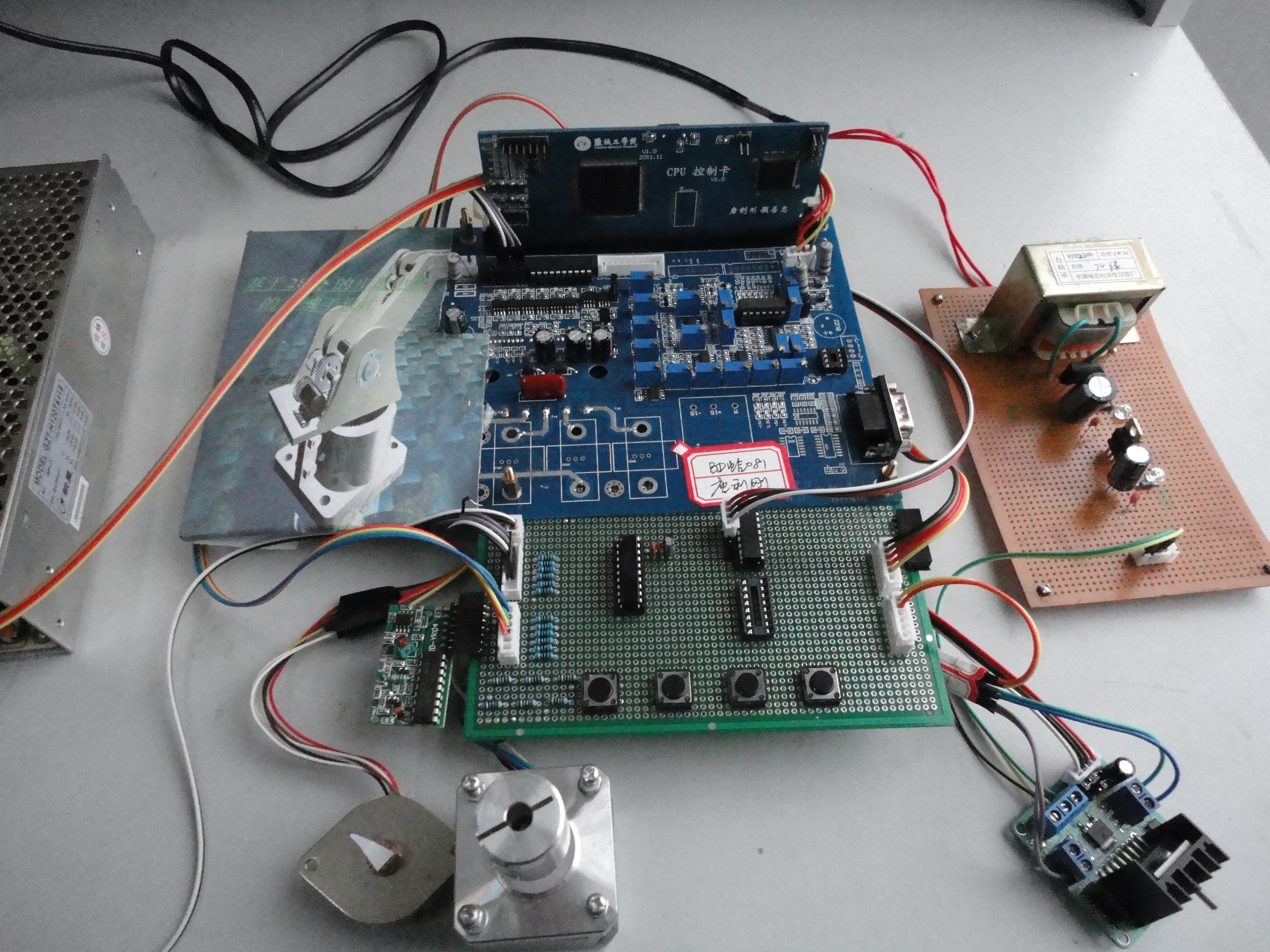
1.机械手由腰部步进电机与手臂步进电机组成,在两个自由度的空间内能自由旋转,没有死角。
2.可流水线作业,速度可调,旋转精度可调,稳定性高,抗干扰能力强。
3.采用高端控制芯片,可执行冗长、复杂的程序,能更好的进行二次开发。
3.小巧精致,适合很多场合,通用性强。
4.功耗低,高效率,节能减排。
1.机械手由腰部步进电机与手臂步进电机组成,在两个自由度的空间内能自由旋转,没有死角。
2.可流水线作业,速度可调,旋转精度可调,稳定性高,抗干扰能力强。
3.采用高端控制芯片,可执行冗长、复杂的程序,能更好的进行二次开发。
3.小巧精致,适合很多场合,通用性强。
4.功耗低,高效率,节能减排。