Before talking about the two paths. I noticed that 3A current is a specification, which neither the DRV10970 nor the DRV10974 can support. I also can't get a complete datasheet of the BA6840 online so I couldn't determine if it also had that capability.
Another thing I did notice about the BA6840, assuming the datasheet I found is correct, is that it has the capability of a torque loop. Given that motor speed fluctuation is a primary concern, the torque loop is a key feature that is not present in either of the DRV10x devices.
The DRV10x might say "closed loop" but I don't want to confuse you that this means there is a speed loop, torque loop, or speed regulation. The DRV10x has the potential to have very low speed fluctuation (~1% speed fluctuation) if the load is very constant, and the motor is of high quality.
To combat this, some customers will introduce a cheap MCU that will be able to provide a reference speed and monitor the speed through FG to reduce the error between them (to make a speed loop). Usually this results in <1% speed fluctuation but has an increased board size, cost, and coding support. We have some plans to integrate these features in the next gen, but that is a ways off and I'd be more interested solving your problem now.
With these specs in mind, the BA6840 might be the better part for the application, I encourage you to take a look at the specifications and quantify them more rigorously.
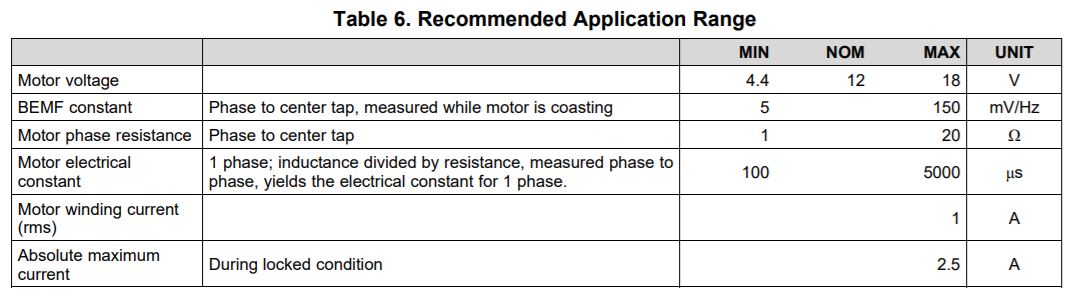
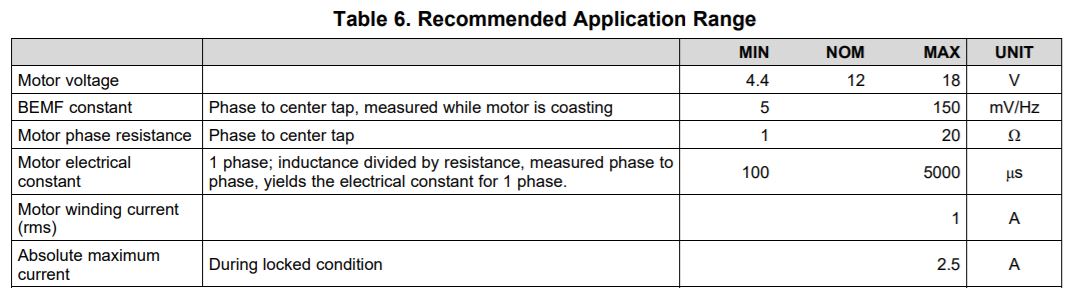
It looks like you have sensored motor and you might notice the DRV10974 is sensorless (note that the DRV10970 is our only sensored device right now). Sensorless solutions usually have slower start ups compared to sensored and are more prone to problems (e.g. some tuning would be needed). I encourage you to take a look at the recommended application range and see if your motor falls neatly into the bounds of the algorithm. If it does not, we will not have high confidence that the device will be able to spin the motor; but it doesn't guarantee it is impossible.




{kind=link}