Other Parts Discussed in Thread: AWR1642, DCA1000EVM
你好
我正在使用AWR1642 + DCA1000EVM
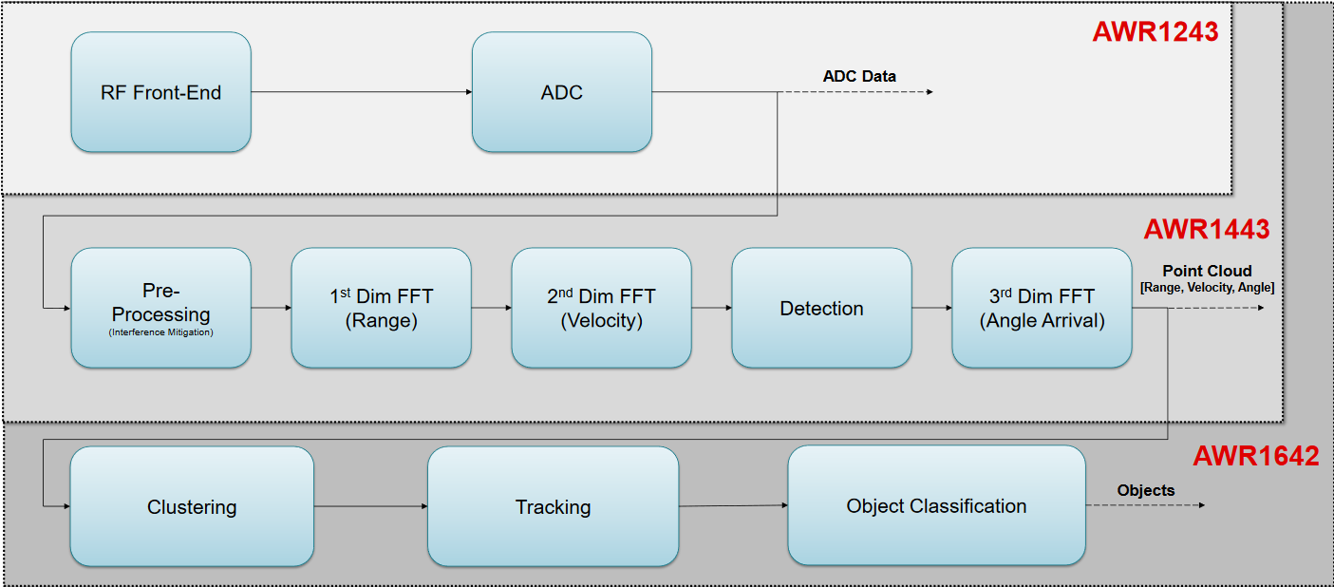
打算要提取出point cloud data
我參考了industrial toolbox 的demo
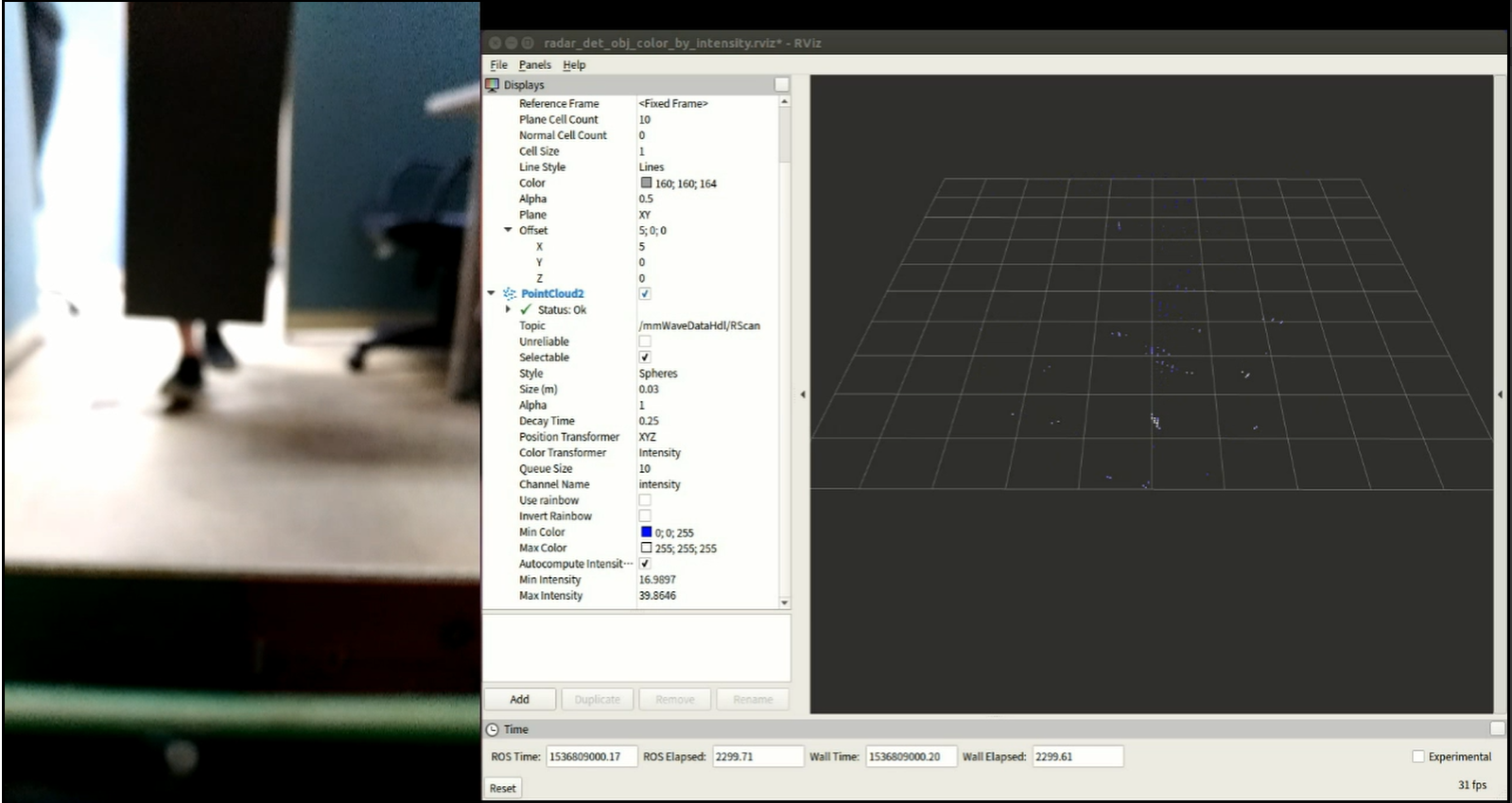
在ROS顯示出了point cloud
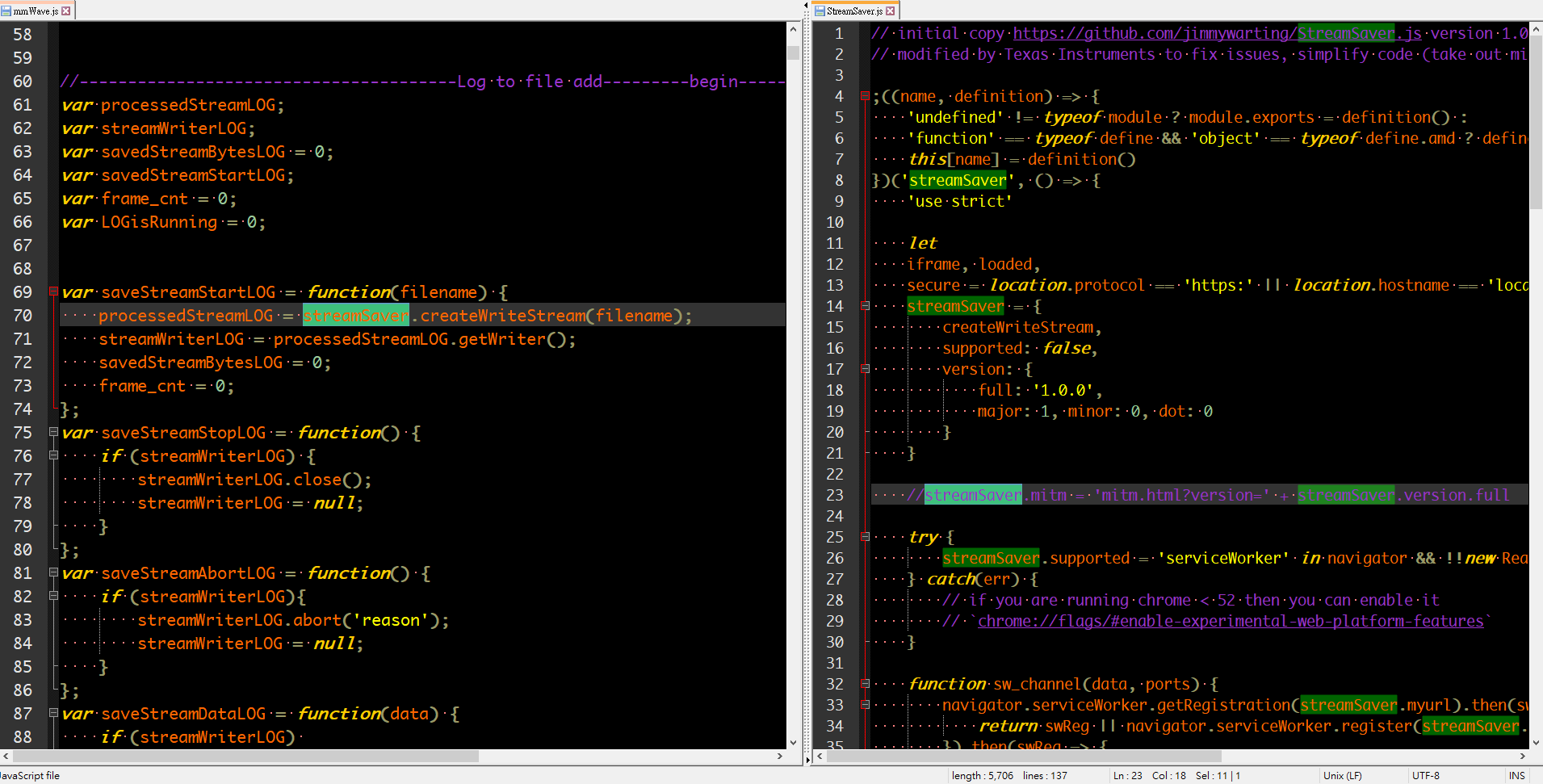
但似乎只能save config?
感謝您
Other Parts Discussed in Thread: AWR1642, DCA1000EVM
你好
我正在使用AWR1642 + DCA1000EVM
打算要提取出point cloud data
我參考了industrial toolbox 的demo
在ROS顯示出了point cloud
但似乎只能save config?
感謝您