

温馨提示:本连载帖子图形文字密切结合,每一步操作都有截图,建议大家注册登录本论坛,这样方能看到图片。
低功耗蓝牙(BluetoothLow Energy),简称BLE。蓝牙低能耗无线技术利用许多智能手段最大限度地降低功耗。
蓝牙2.1+EDR/3.0+HS版本(通常指“标准蓝牙技术”)与蓝牙低能耗(BLE)技术有许多共同点:它们都是低成本、短距离、可互操作的鲁棒性无线技术,工作在免许可的2.4GHz ISM射频频段。
不过它们之间有一个重要区别:蓝牙低能耗技术从一开始就设计为超低功耗(ULP)无线技术,而标准蓝牙技术主要是能够构成“低功耗的”无线连接。
标准蓝牙技术是一种“面向连接”的无线技术,具有固定的连接时间间隔,因此是移动电话连接无线耳机等高活动连接的理想之选。相反,蓝牙低能耗技术采用可变连接时间间隔,这个间隔根据具体应用可以设置为几毫秒到几秒不等。另外,因为BLE技术采用非常快速的连接方式,因此平时可以处于“非连接”状态(节省能源),此时链路两端相互间只是知晓对方,只有在必要时才开启链路,然后在尽可能短的时间内关闭链路。
BLE技术的工作模式非常适合用于从微型无线传感器(每半秒交换一次数据)或使用完全异步通信的遥控器等其它外设传送数据。这些设备发送的数据量非常少(通常几个字节),而且发送次数也很少(例如每秒几次到每分钟一次,甚至更少)。
蓝牙低能耗架构共有两种芯片构成:单模芯片和双模芯片。蓝牙单模器件是蓝牙规范中新出现的一种只支持蓝牙低能耗技术的芯片——是专门针对ULP操作优化的技术的一部分。蓝牙单模芯片可以和其它单模芯片及双模芯片通信,此时后者需要使用自身架构中的蓝牙低能耗技术部分进行收发数据。双模芯片也能与标准蓝牙技术及使用传统蓝牙架构的其它双模芯片通信。
双模芯片可以在目前使用标准蓝牙芯片的任何场合使用。这样安装有双模芯片的手机、PC、个人导航设备(PND)或其它应用就可以和市场上已经在用的所有传统标准蓝牙设备以及所有未来的蓝牙低能耗设备通信。然而,由于这些设备要求执行标准蓝牙和蓝牙低能耗任务,因此双模芯片针对ULP操作的优化程度没有像单模芯片那么高。
单模芯片可以用单节钮扣电池(如3V、220mAh的CR2032)工作很长时间(几个月甚至几年)。相反,标准蓝牙技术(和蓝牙低能耗双模器件)通常要求使用至少两节AAA电池(电量是钮扣电池的10至12倍,可以容忍高得多的峰值电流),并且更多情况下最多只能工作几天或几周的时间(取决于具体应用)。注意,也有一些高度专业化的标准蓝牙设备,它们可以使用容量比AAA电池低的电池工作。
蓝牙4.0已经走向了商用,在最新款的Xperia Z、Galaxy S3、S4、Note2、SurfaceRT、iPhone 5、iPhone 4S、魅族MX3、Moto Droid Razr、HTC One X、小米手机2、The New iPad、iPad 4、 MacBook Air、Macbook Pro,Nokia Lumia系列以及台商ACER AS3951系列/Getway NV57系列,ASUS UX21/31三星NOTE系列上都已应用了蓝牙4.0技术。
接下来我们从环境的搭建到蓝牙4.0协议栈的开发来深入学习蓝牙4.0的开发过程。
本课程所有程序和文档资料均可在以下网盘下载:
pan.baidu.com/.../link
目录导航:
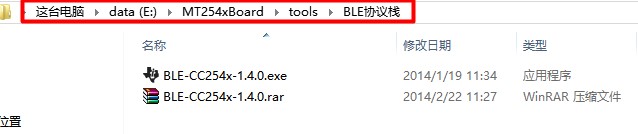
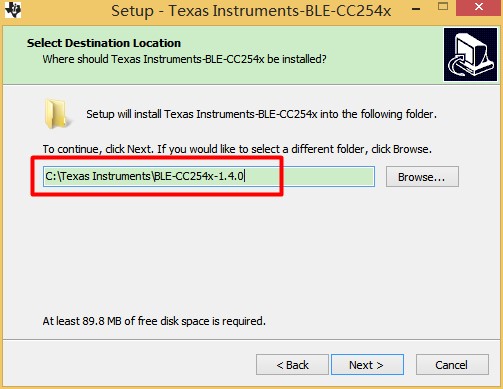
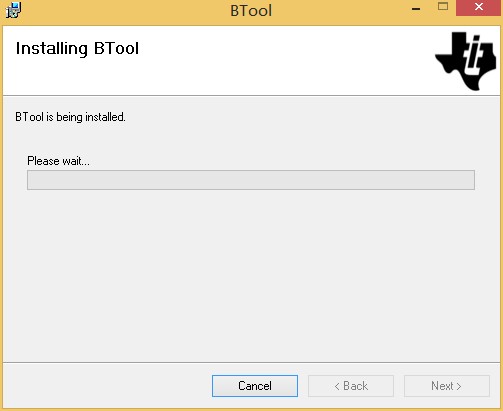
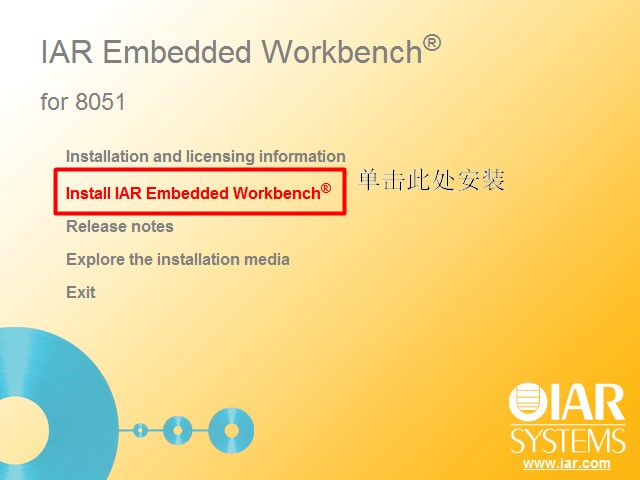
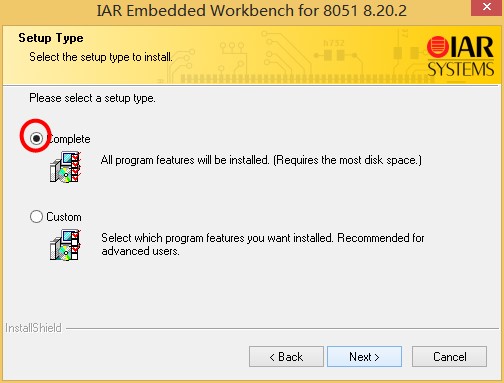
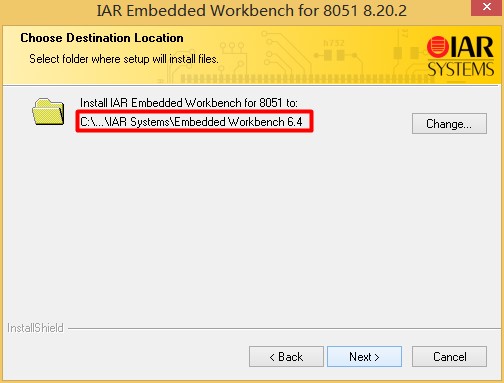
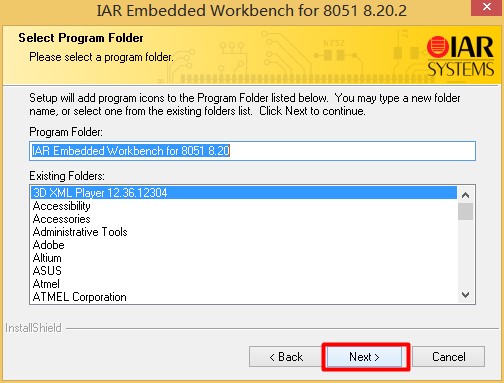
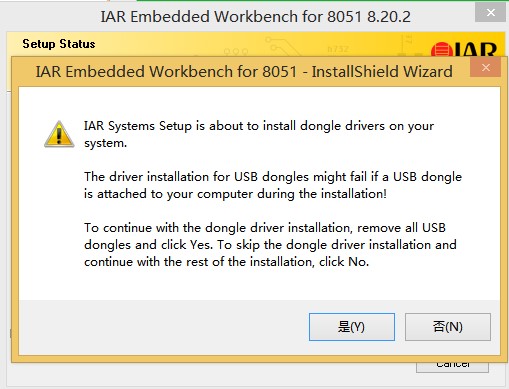
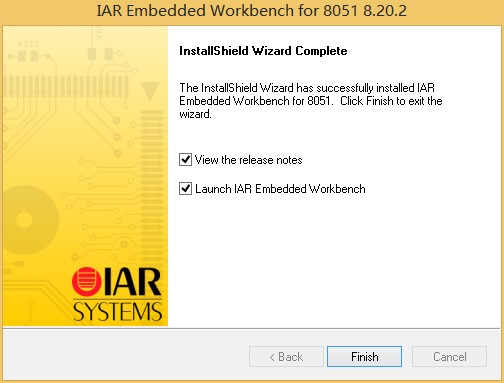
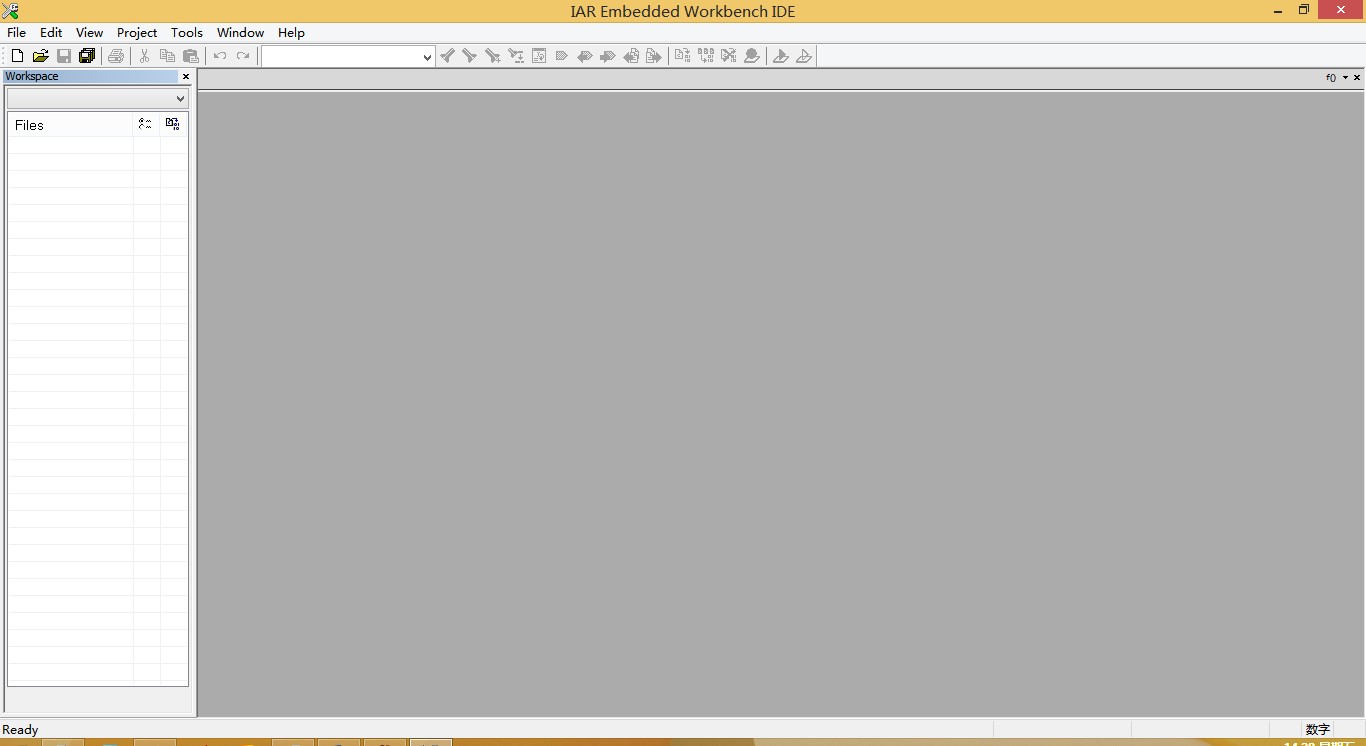
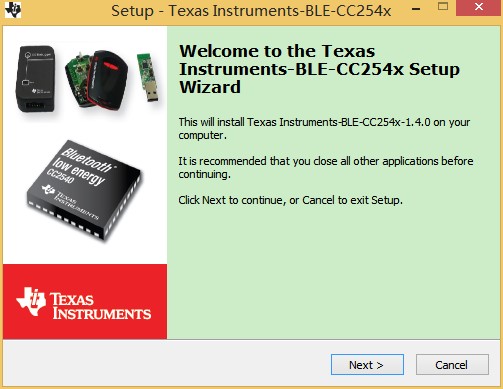
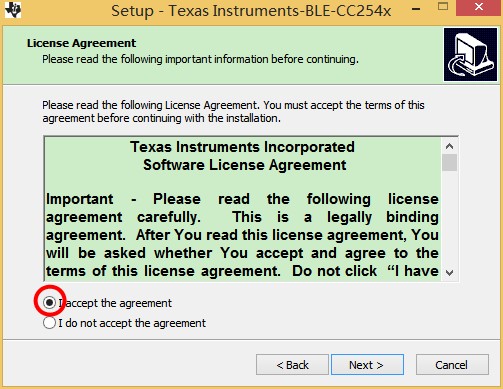
第一节 BLE开发环境的搭建
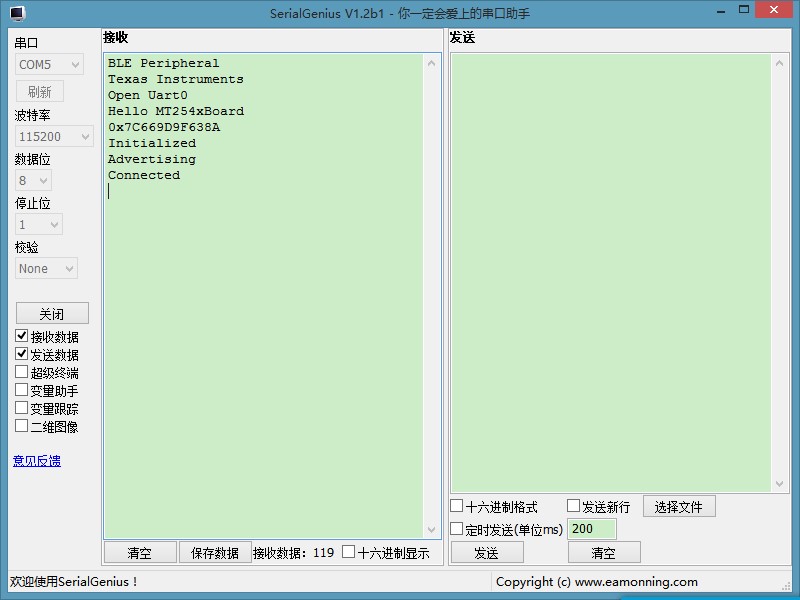
第二节 BLE快速体验
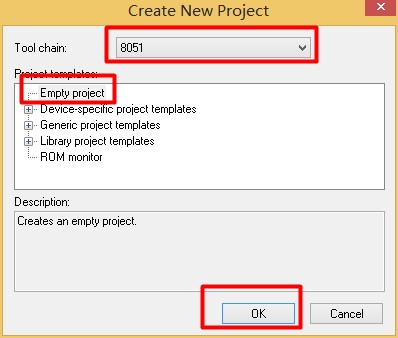
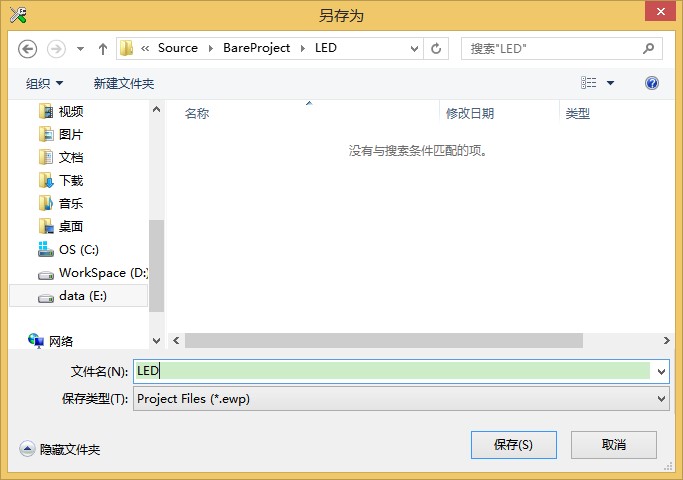
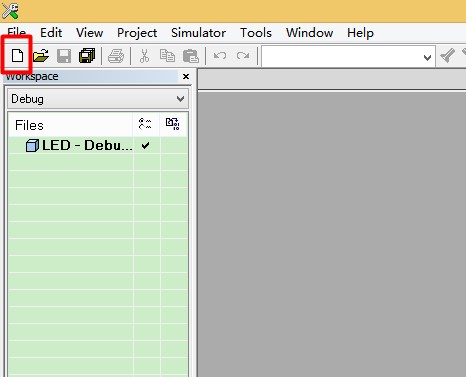
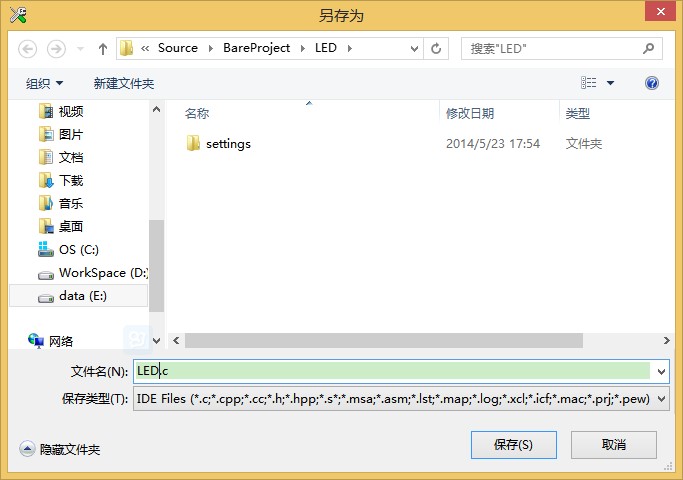
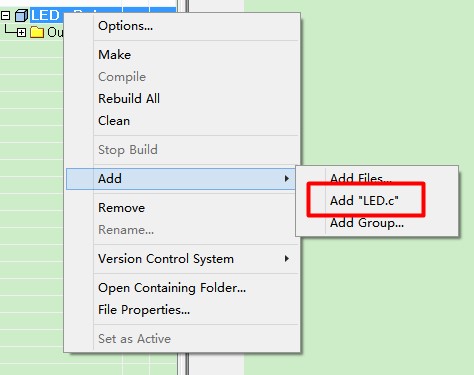
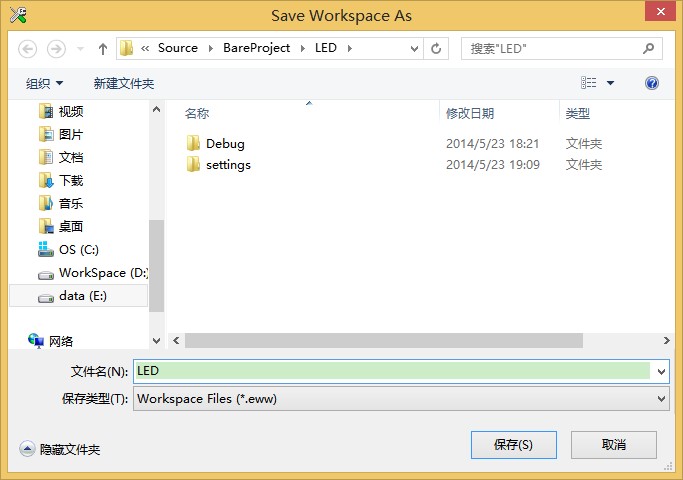
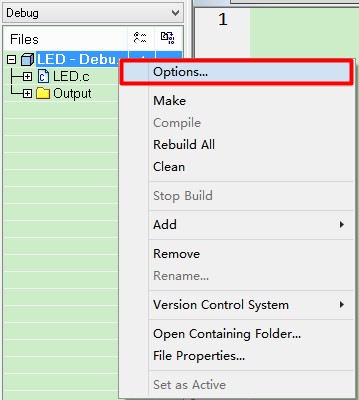
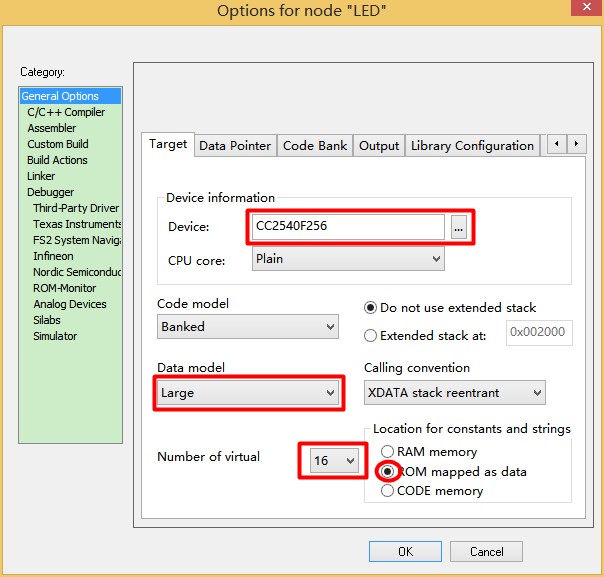
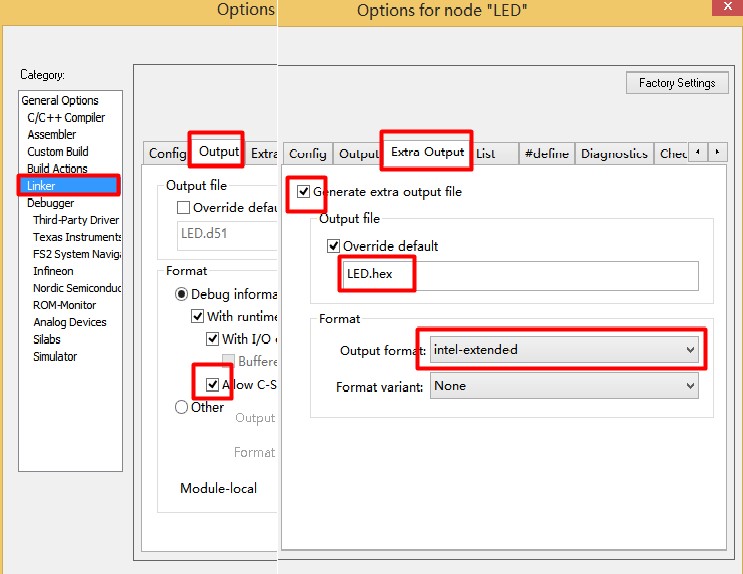
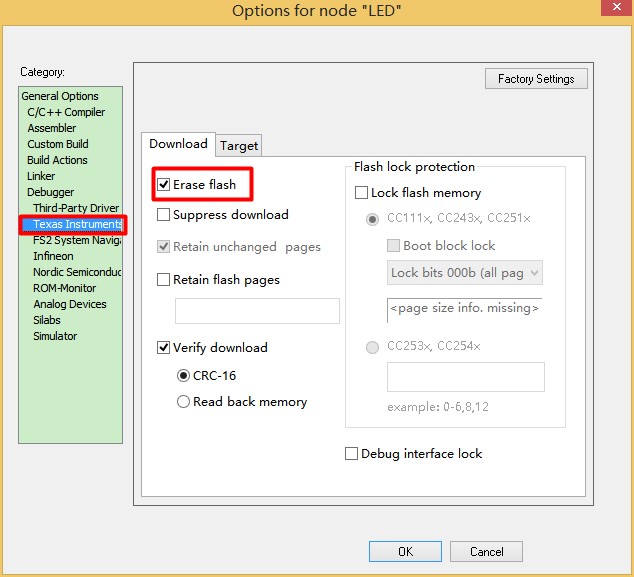
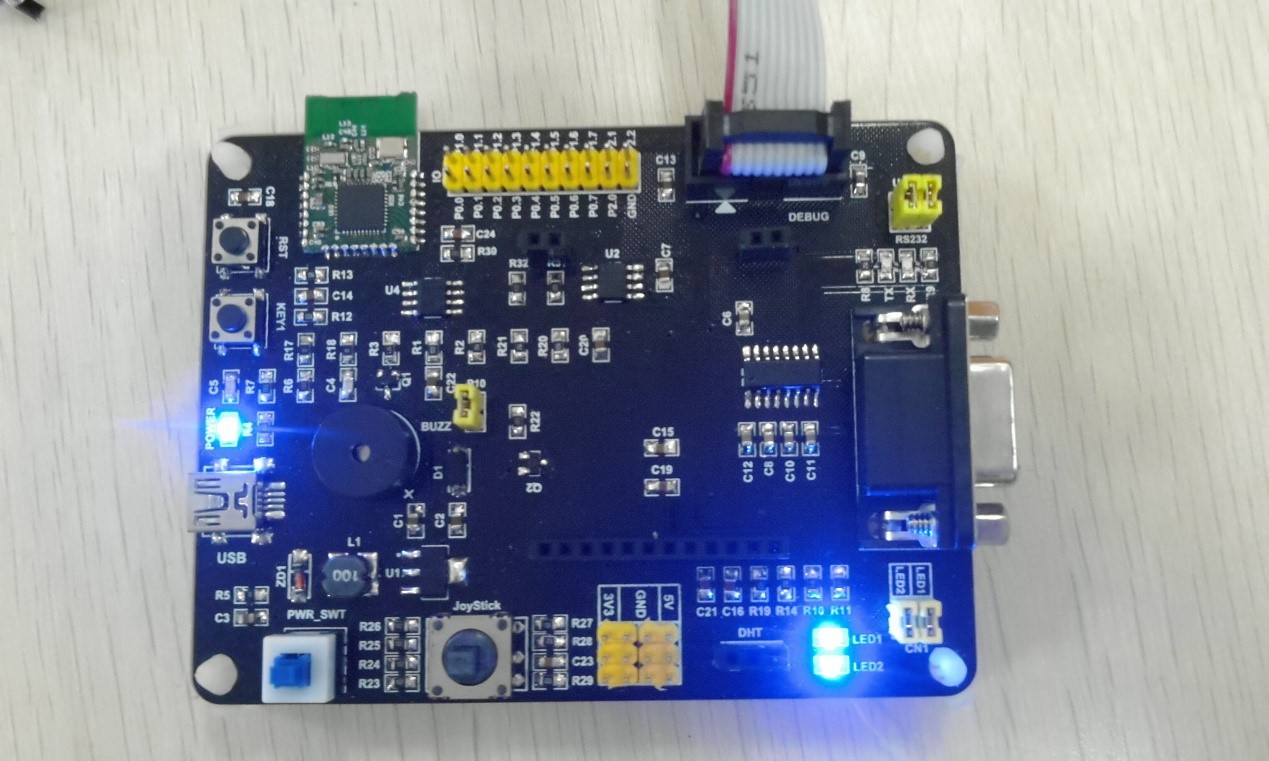
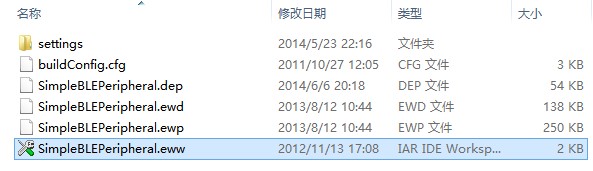
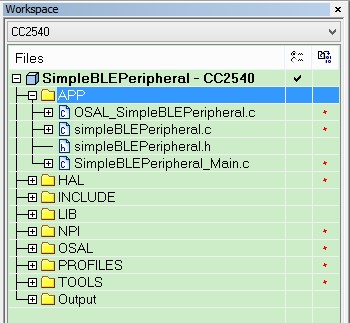
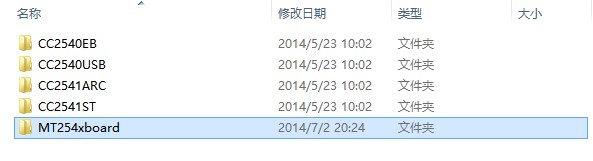
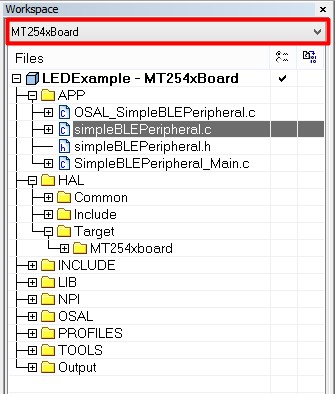
第三节 创建IAR工程-点亮LED
第四节 控制LED
第五节 LCD12864显示
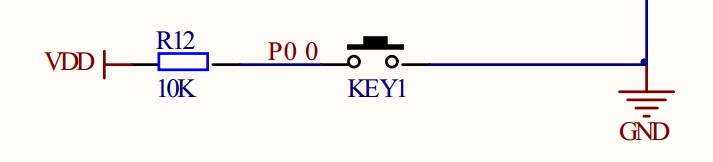
第六节 独立按键之查询方式
第七节 独立按键之中断方式
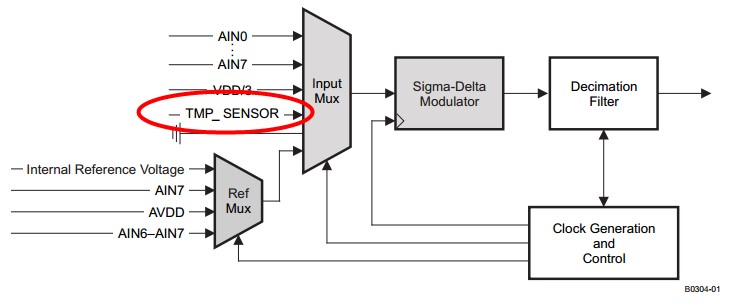
第八节 CC254x内部温度传感器温度采集
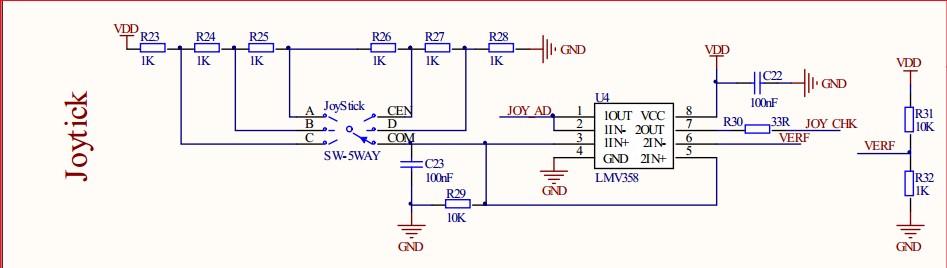
第九节 五向按键
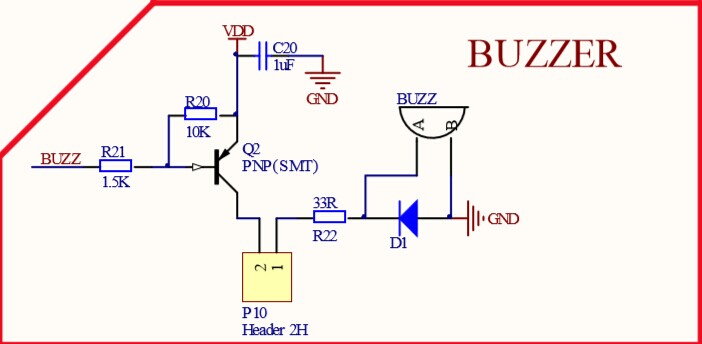
第十节 蜂鸣器
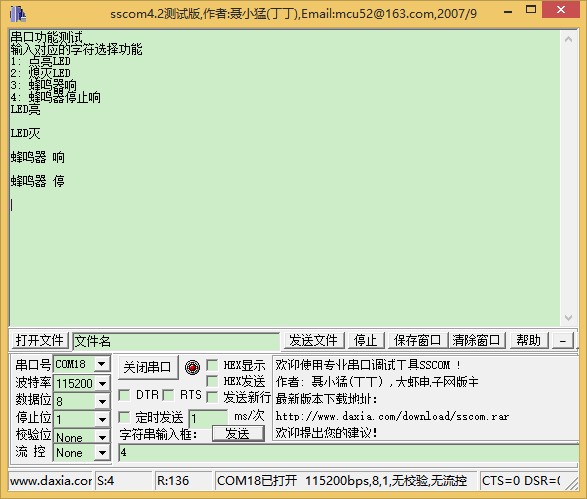
第十一节 串口通信
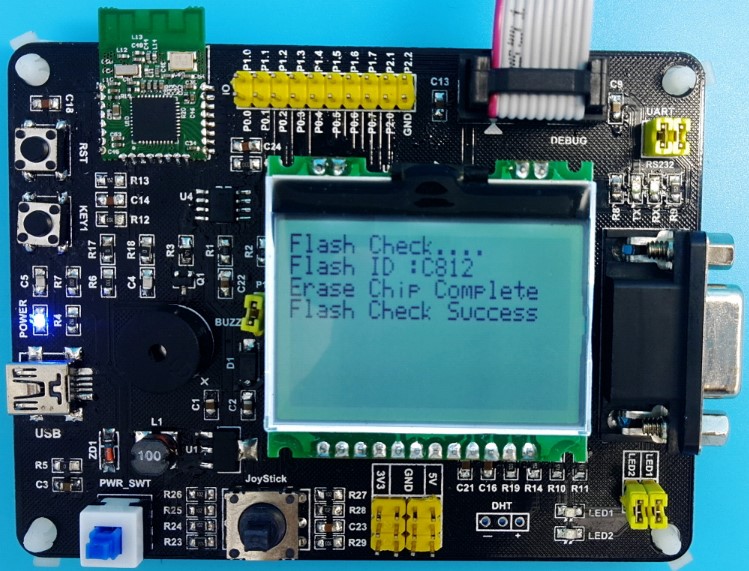
第十二节 Flash的读写
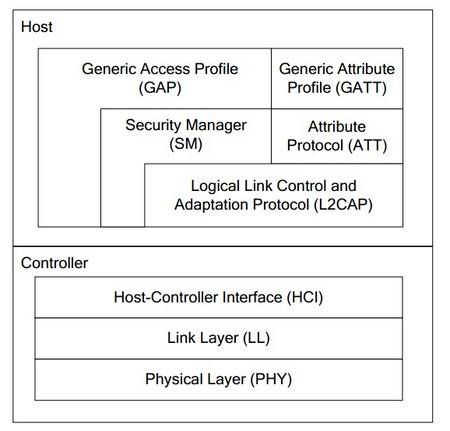
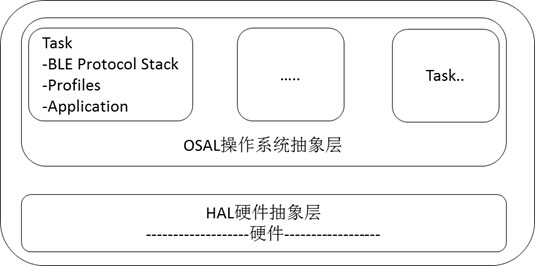
第十三节 BLE协议栈简介
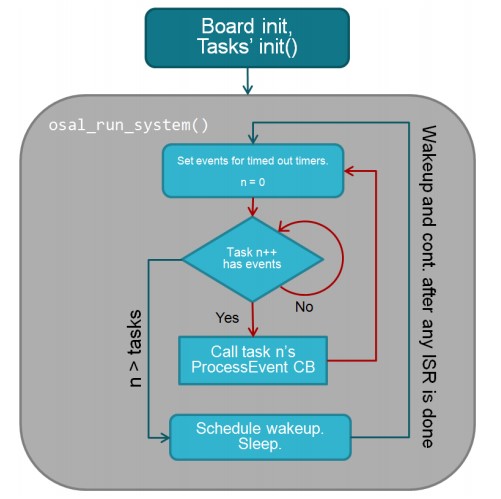
第十四节 OSAL工作原理
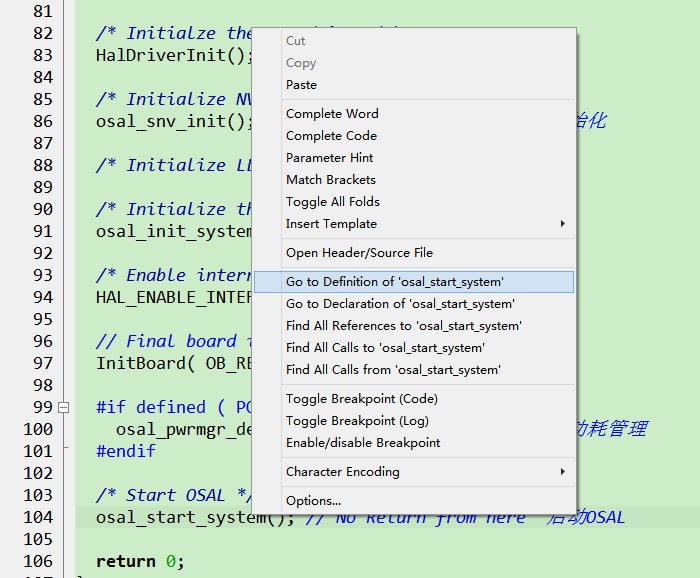
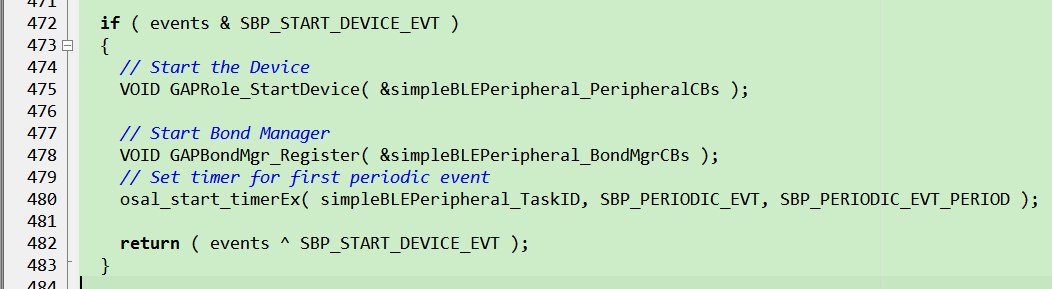
第十五节 BLE蓝牙4.0协议栈启动分析
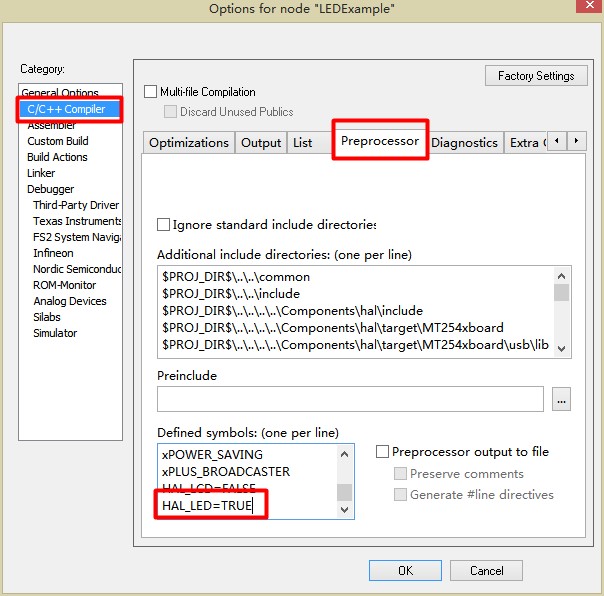
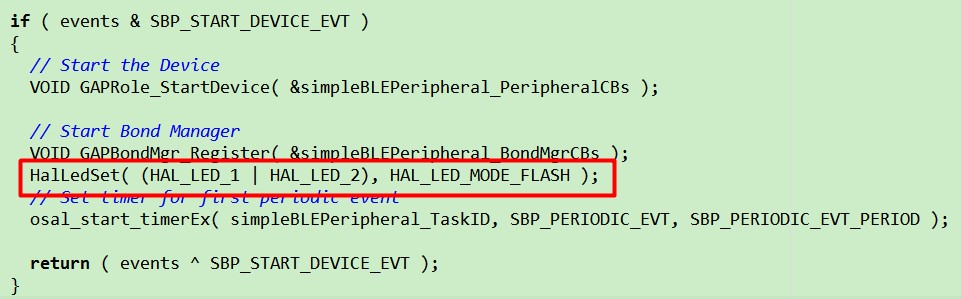
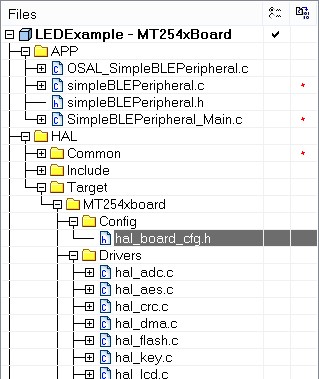
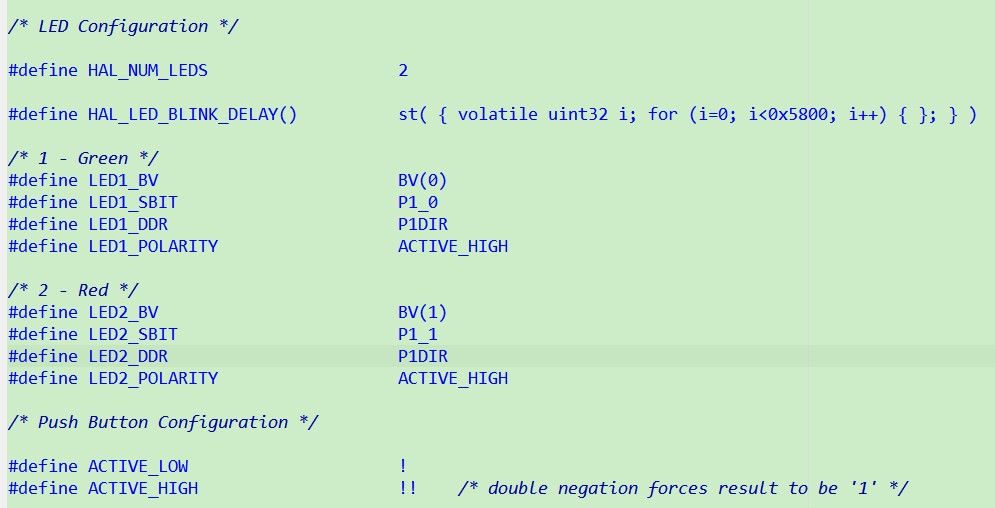
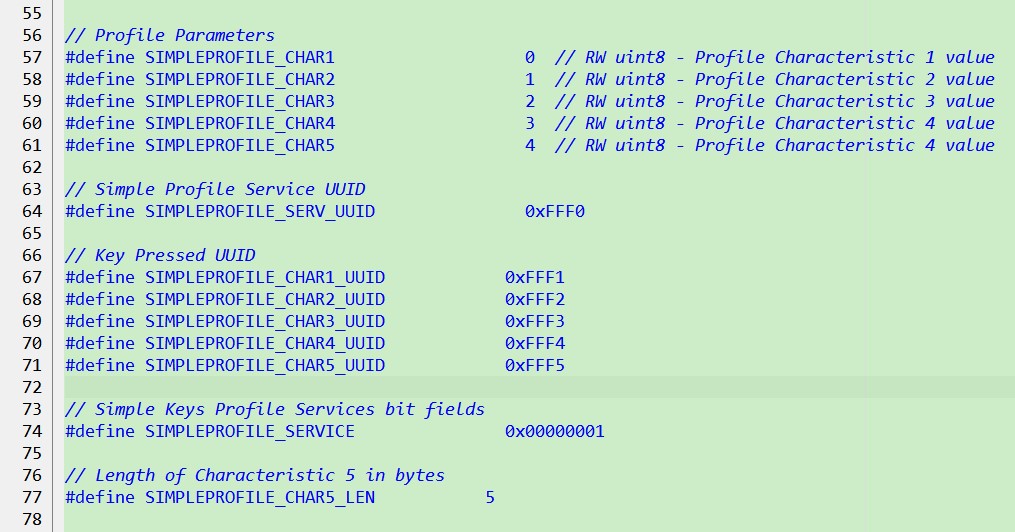
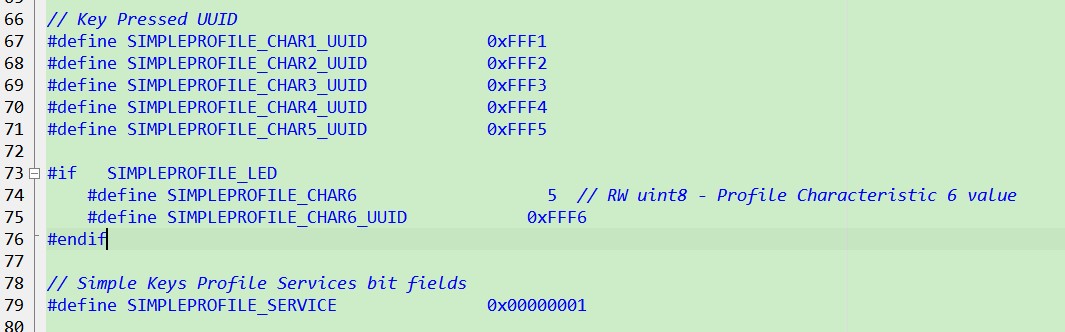
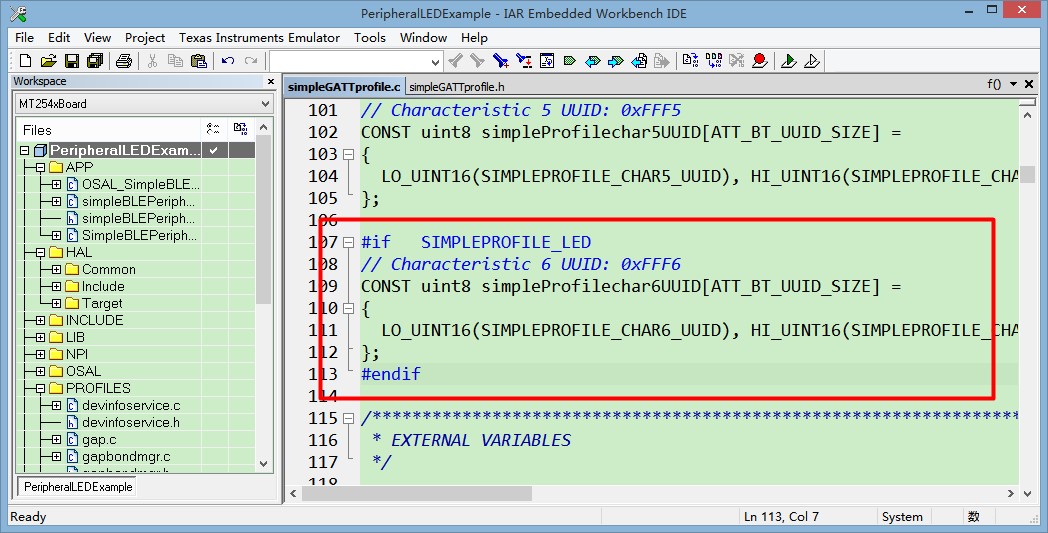
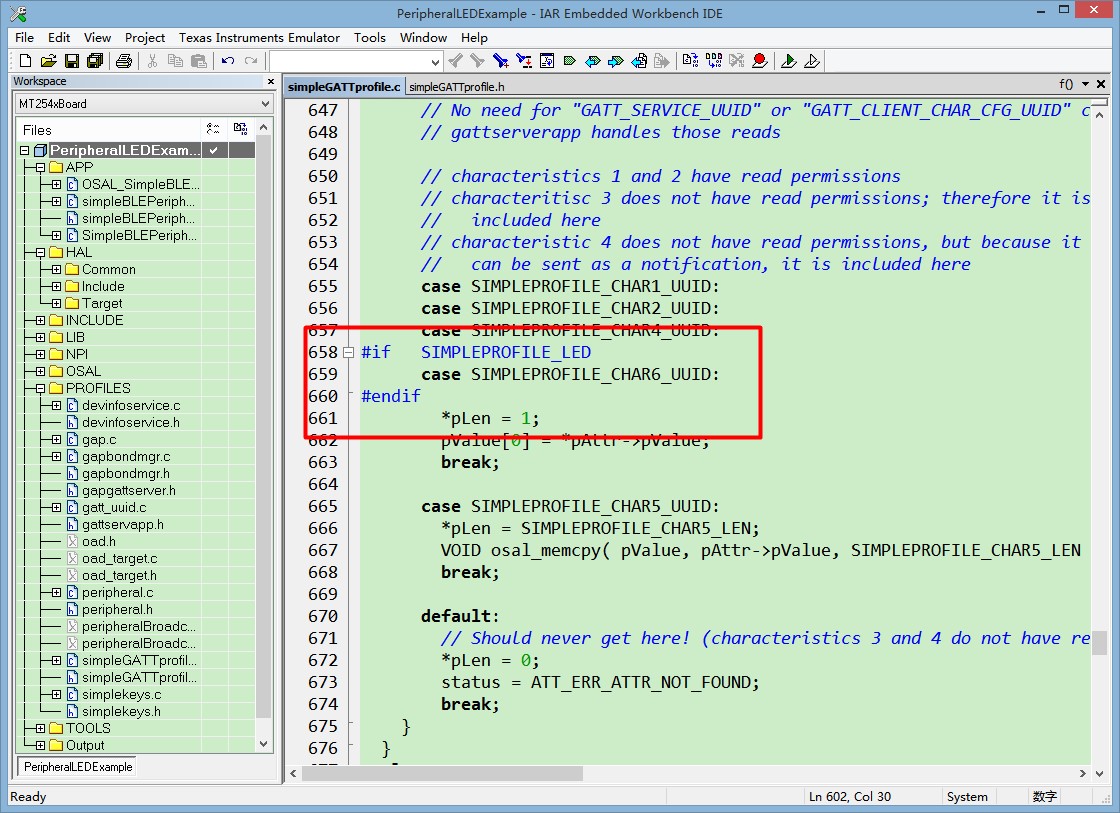
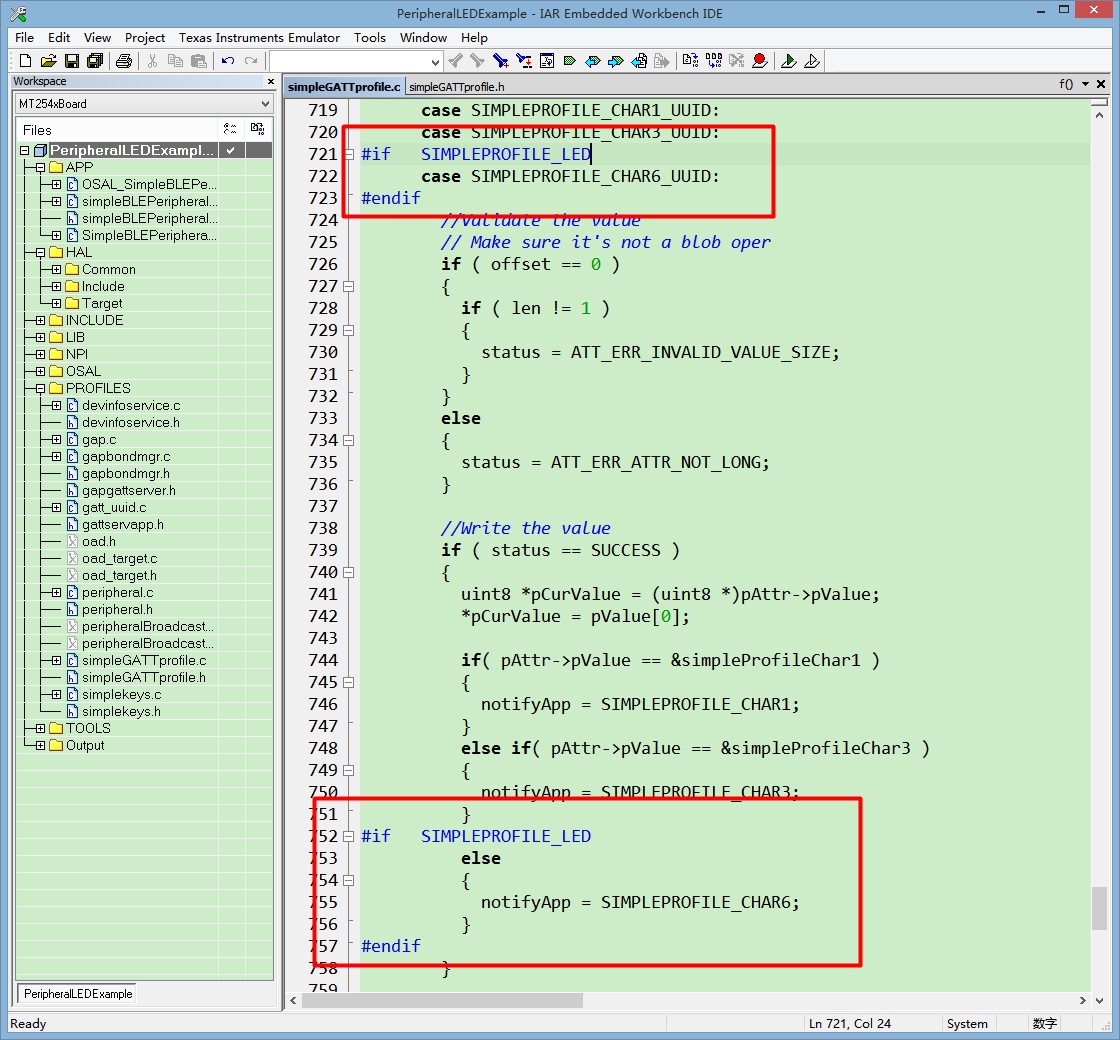
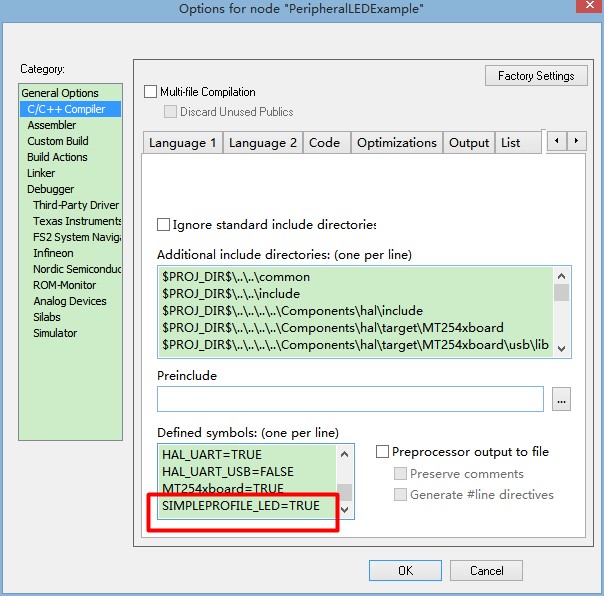
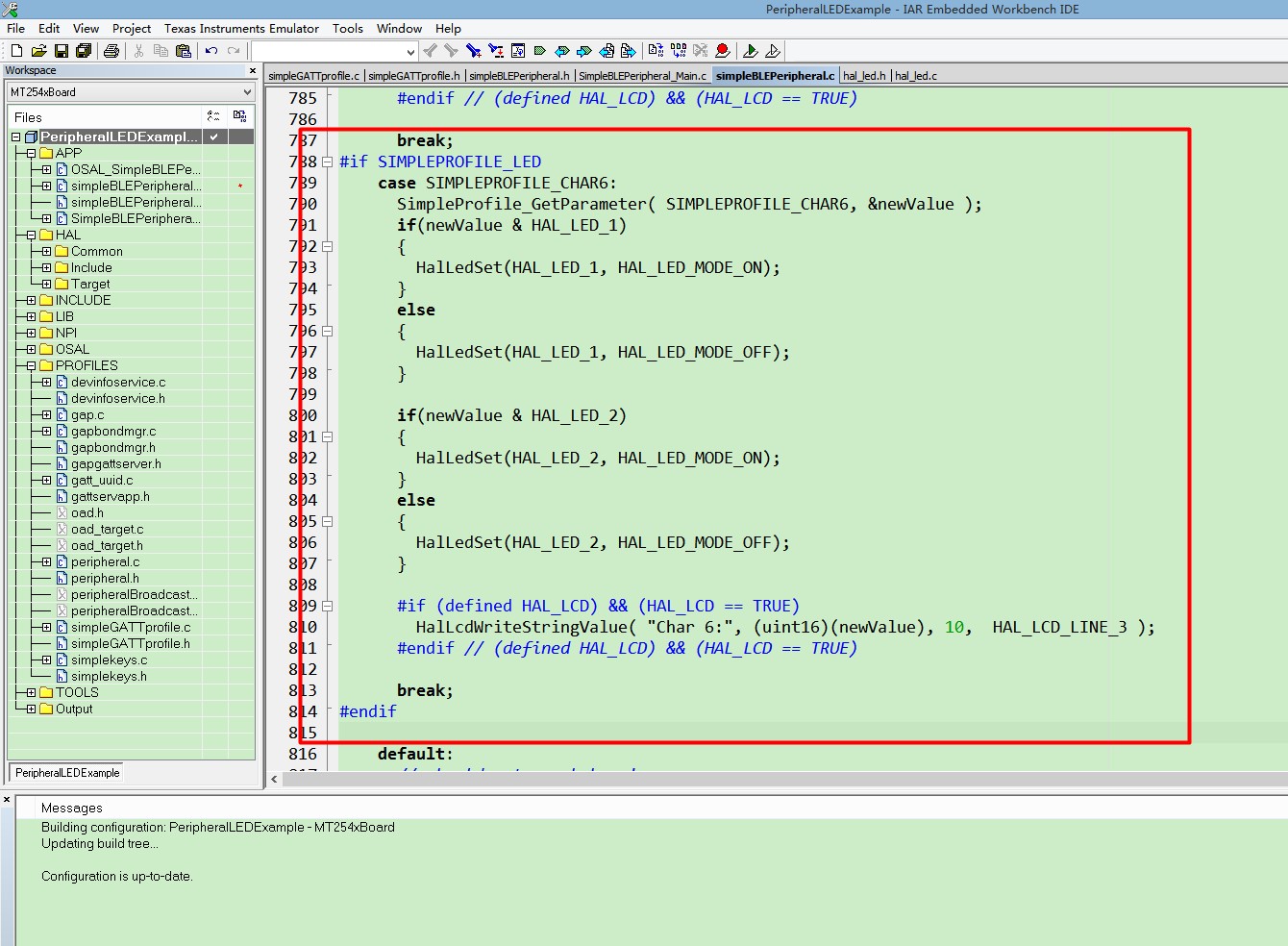
第十六节 协议栈LED实验
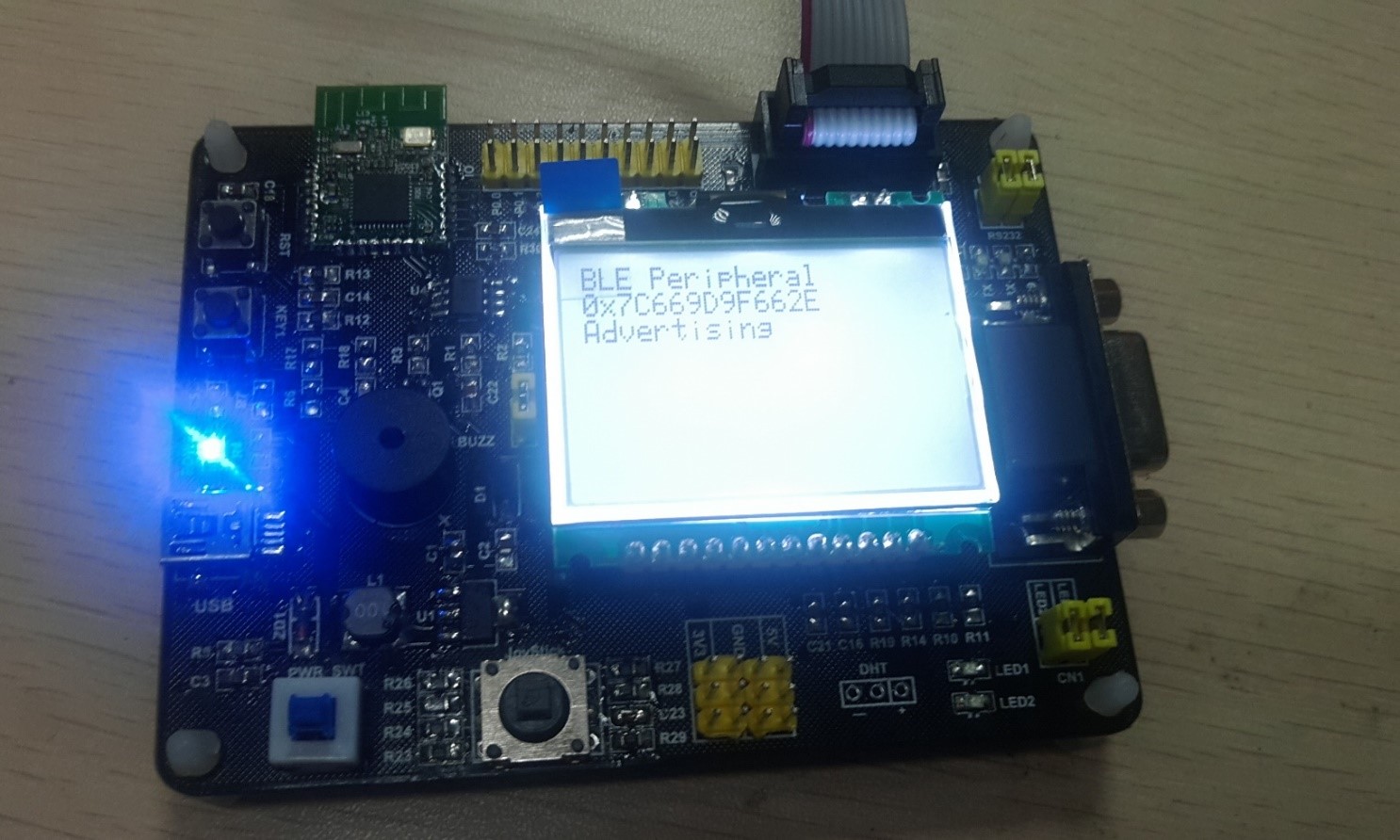
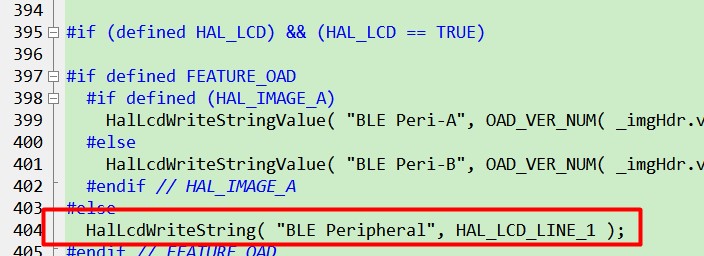
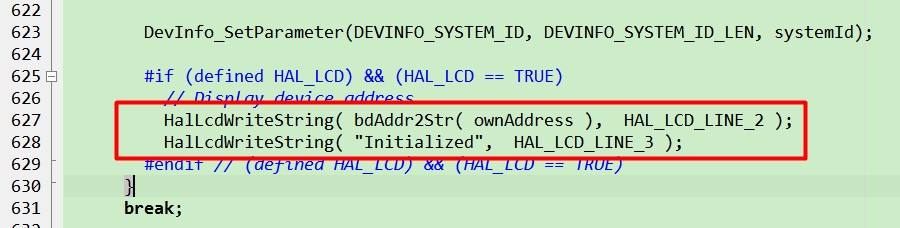
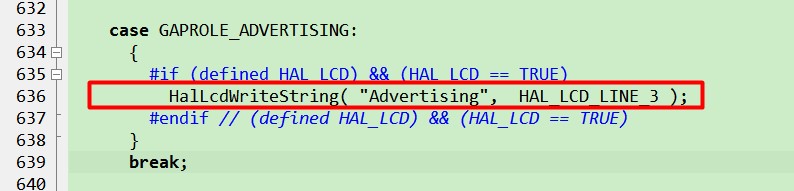
第十六节 协议栈LCD显示
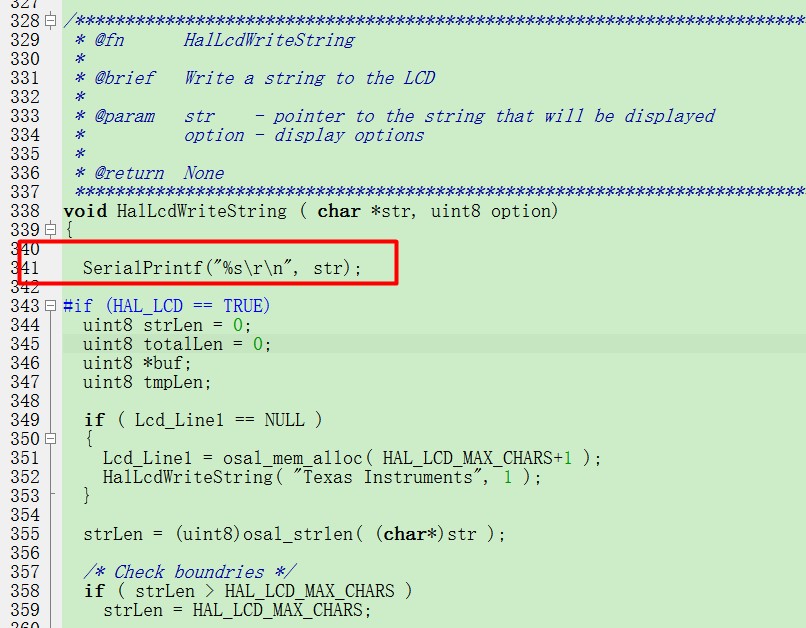
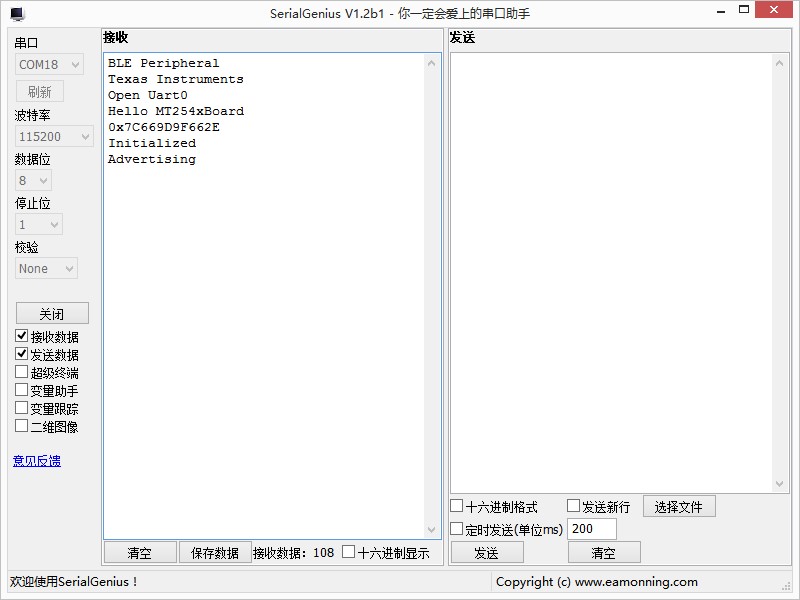
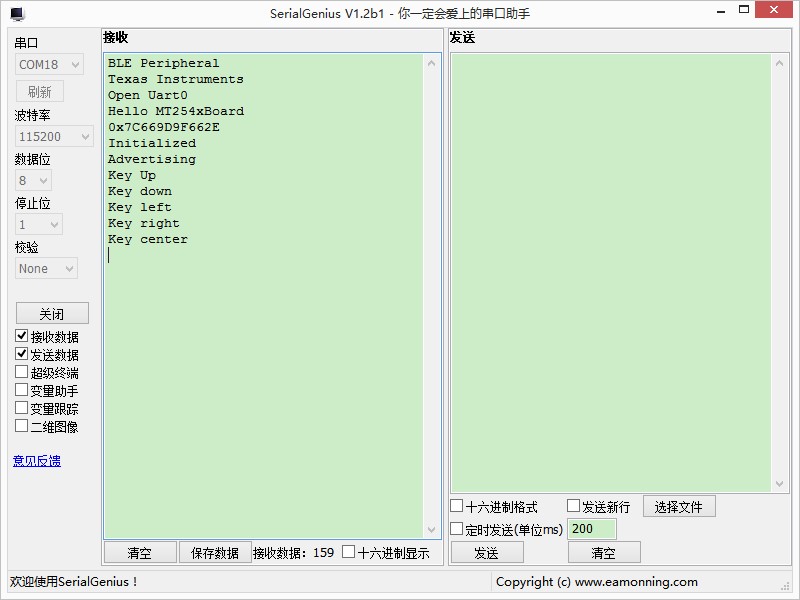
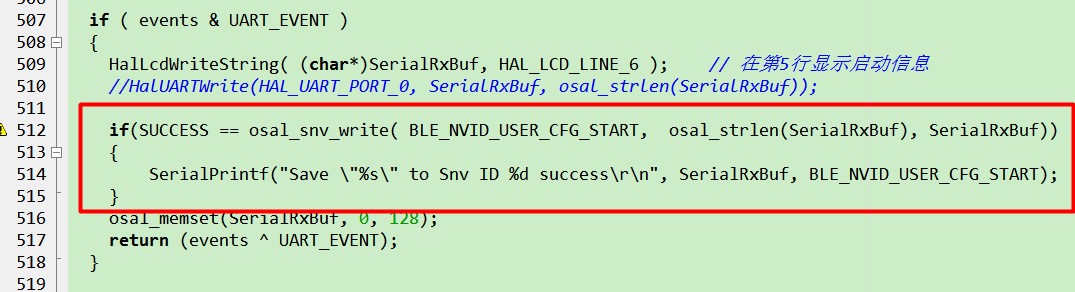
第十七节 协议栈UART实验
第十八节 协议栈五向按键
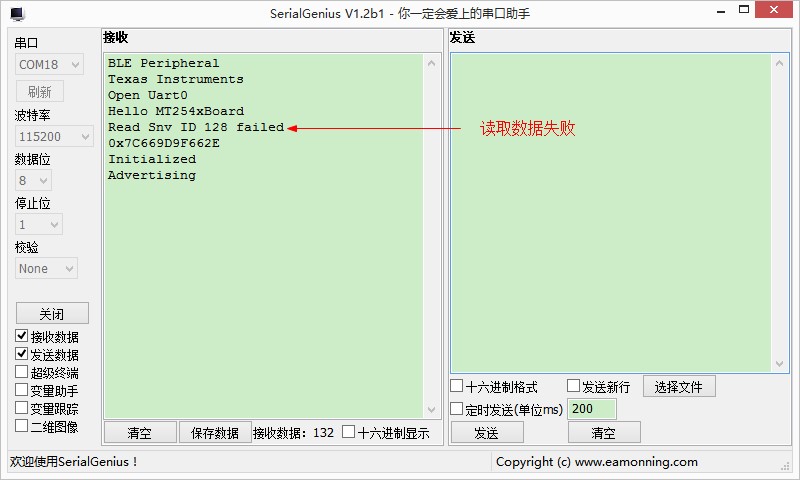
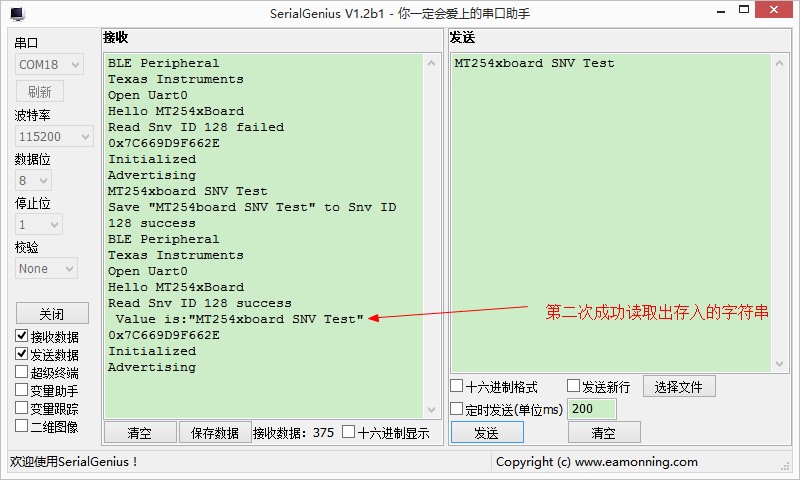
第十九节 协议栈Flash数据存储
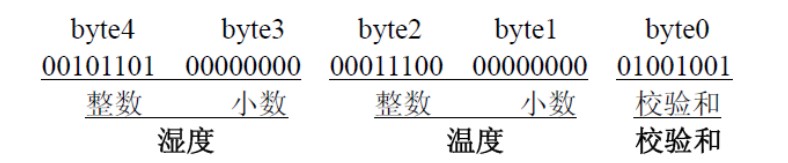
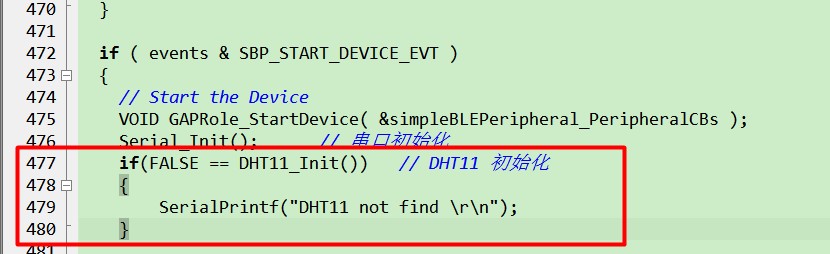
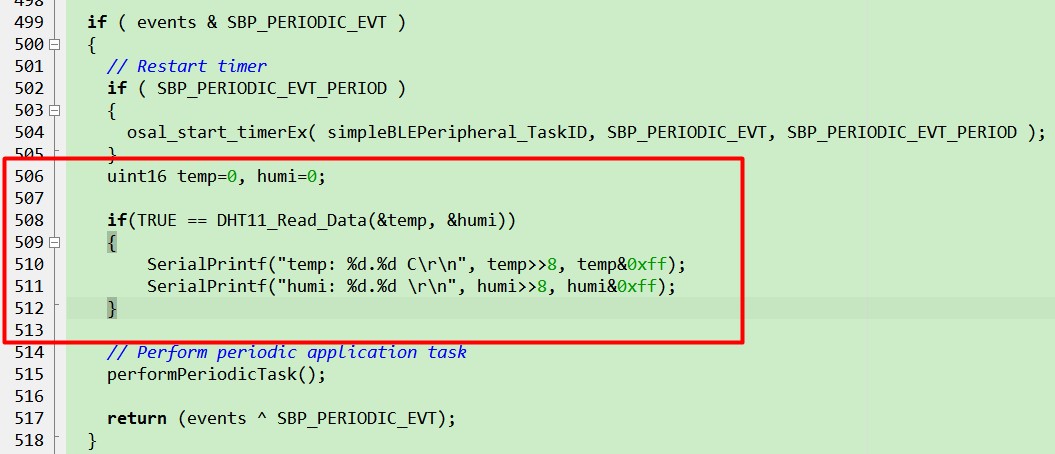
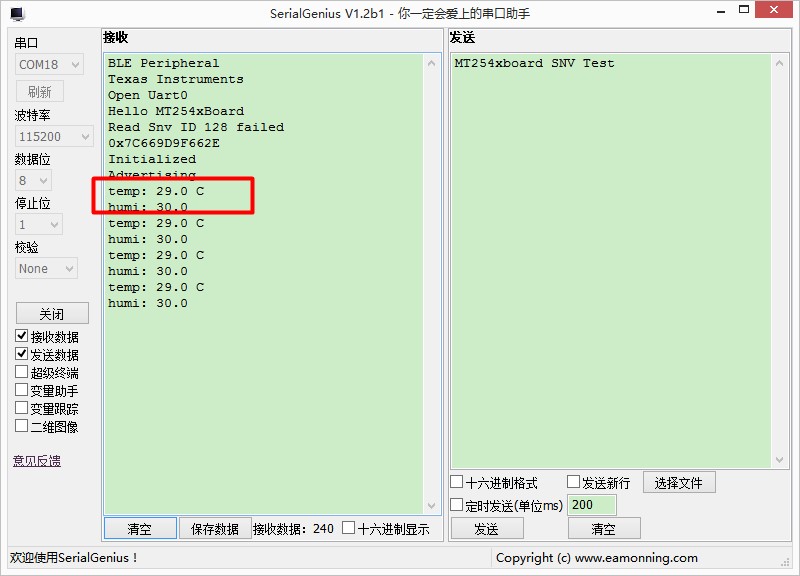
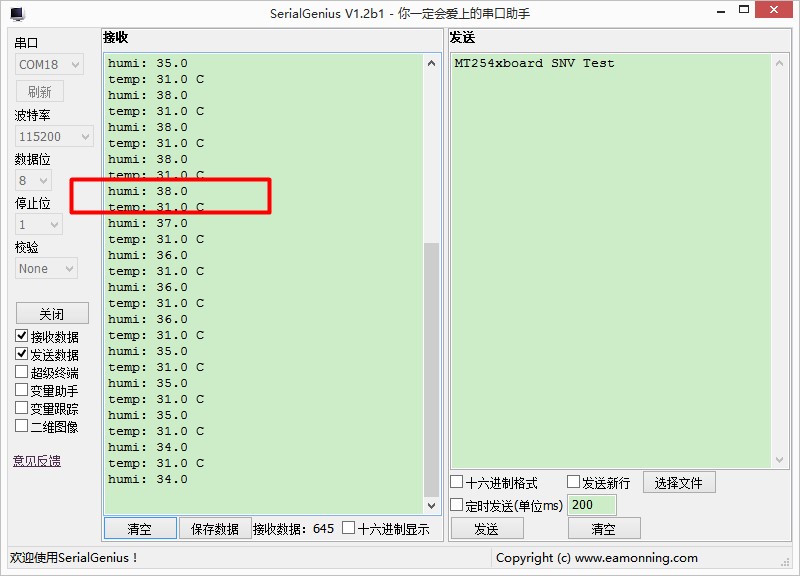
第二十节 DHT11温湿度传感器
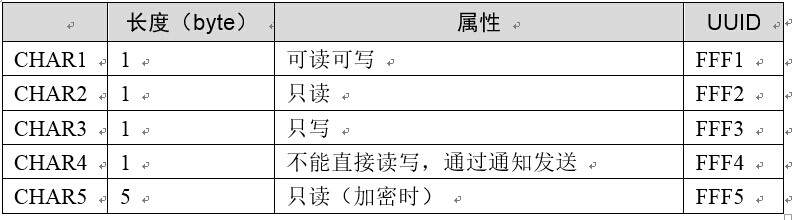
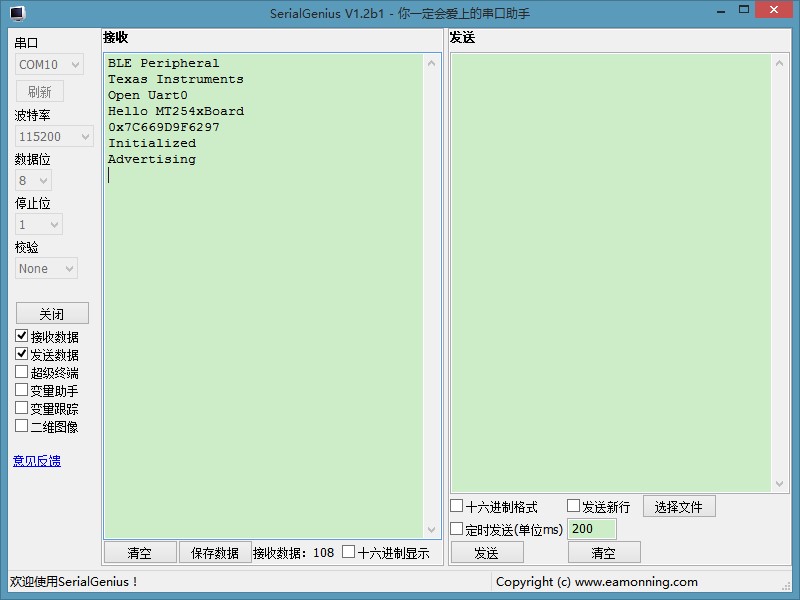
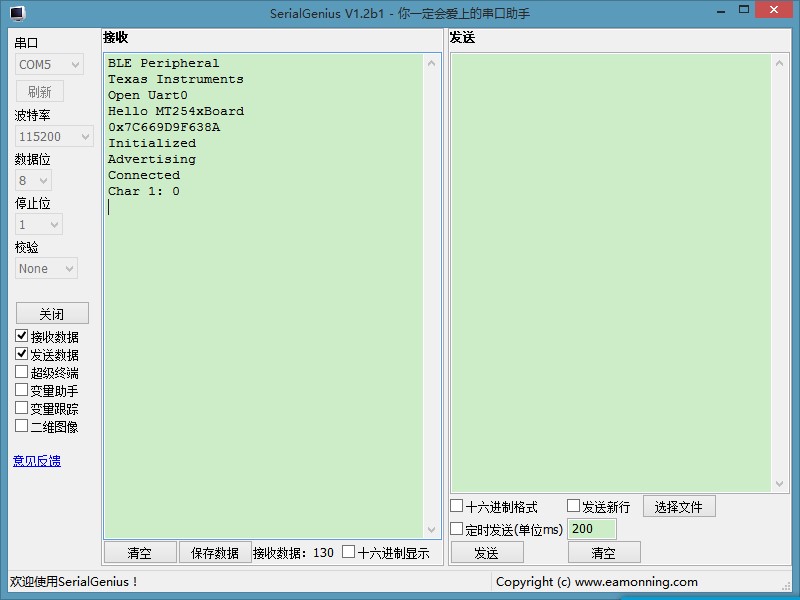
第二十一节 蓝牙协议栈之从机通讯
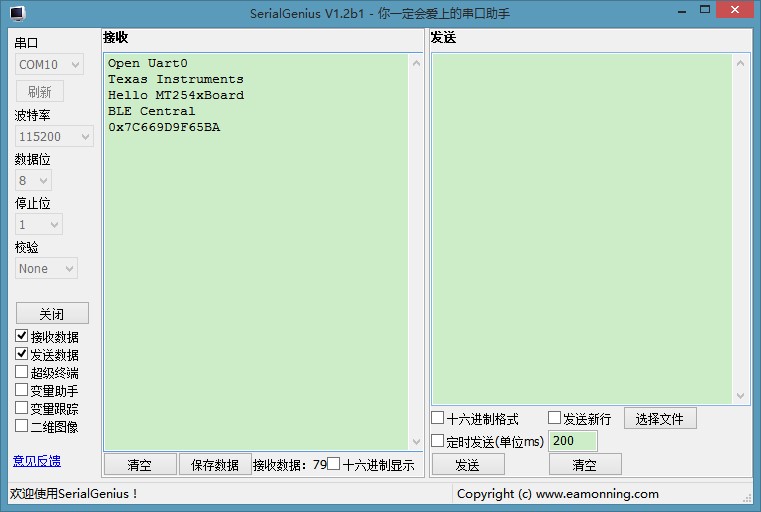
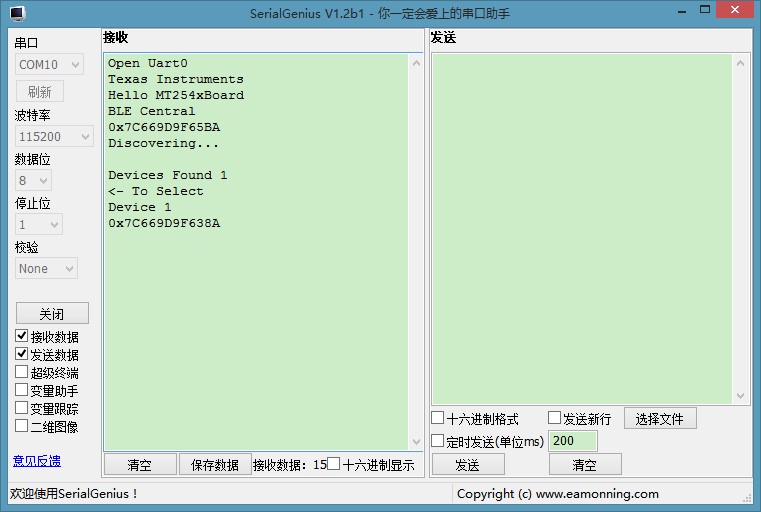
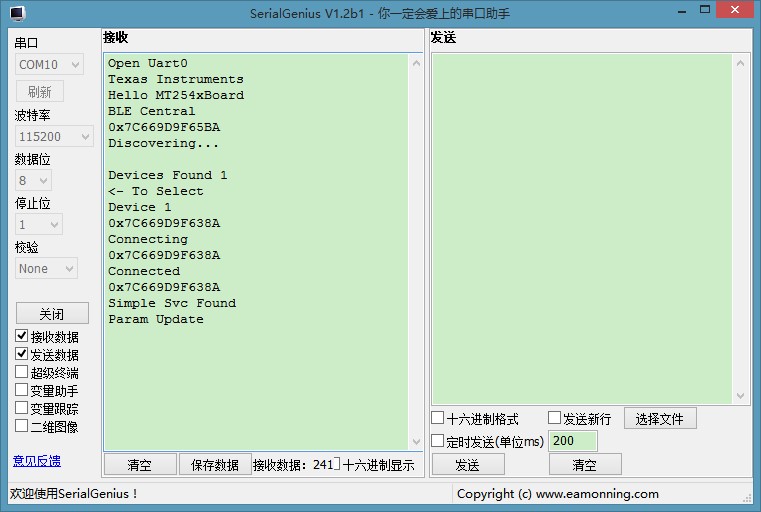
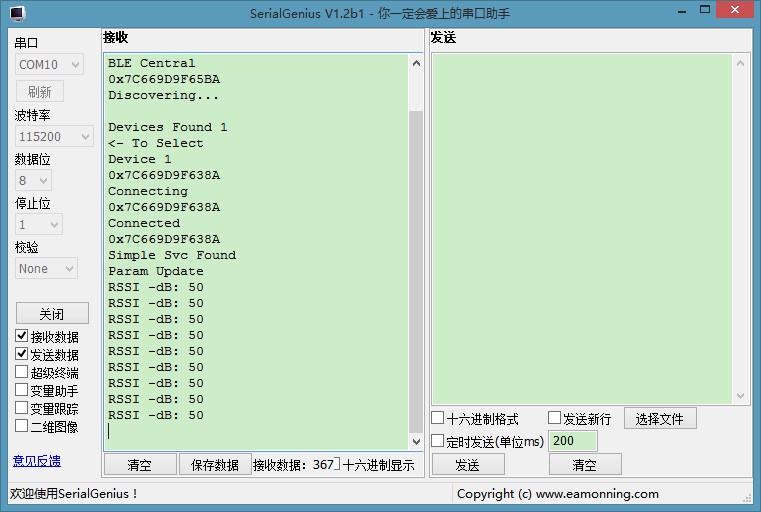
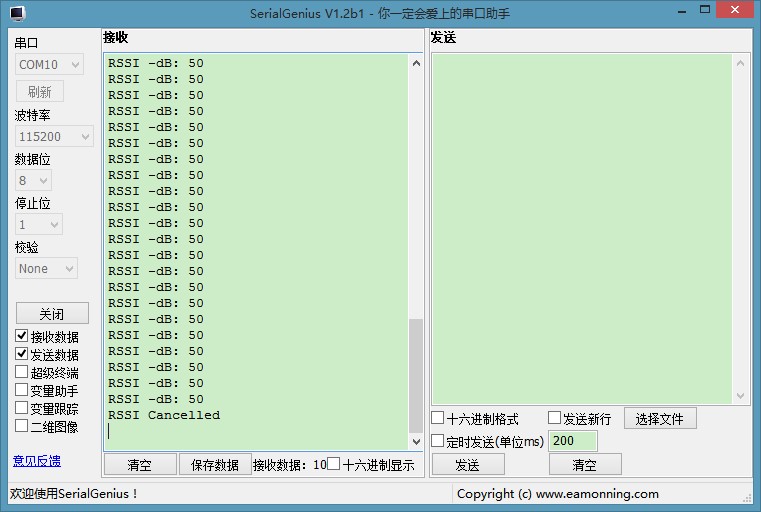
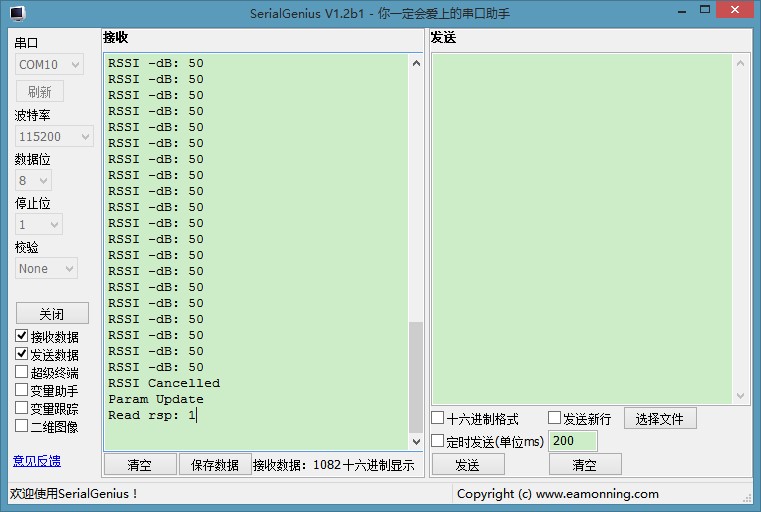
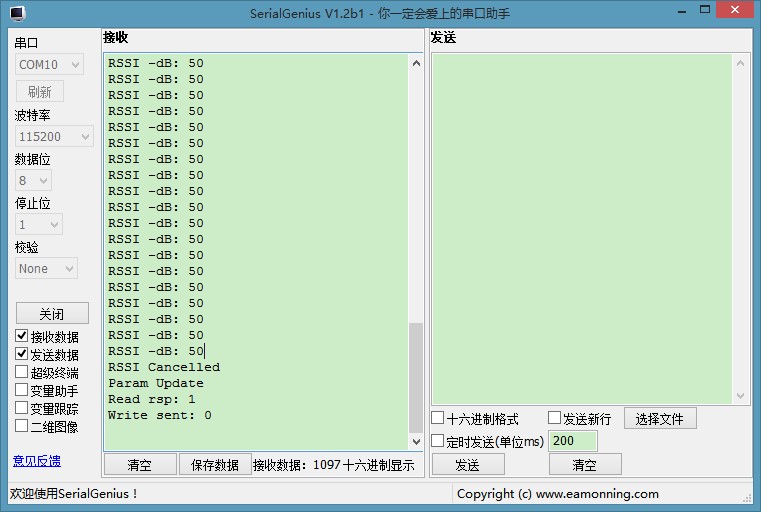
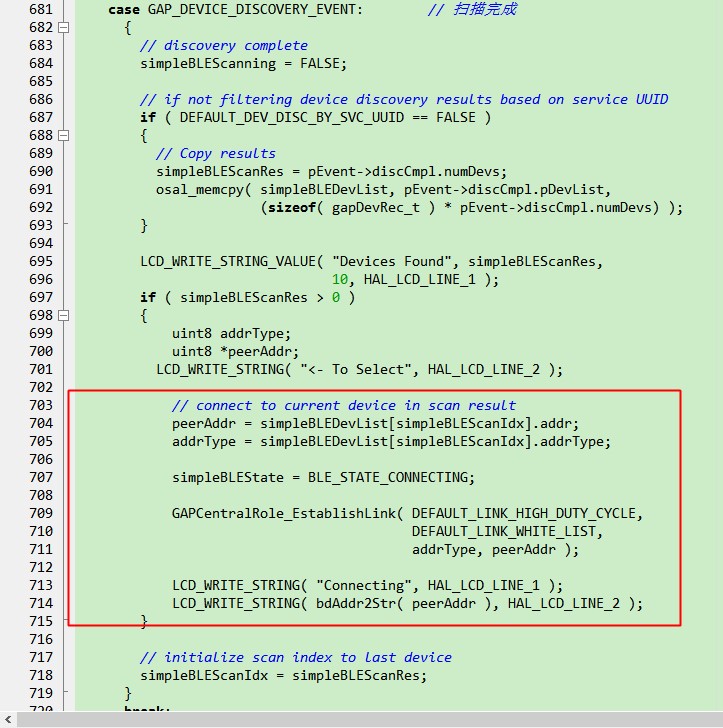
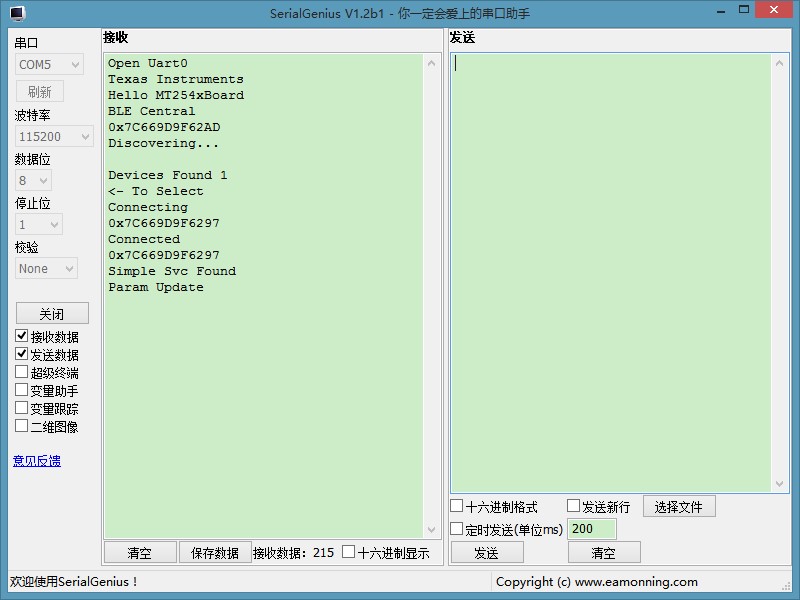
第二十二节 蓝牙协议栈主从一体之主机通讯
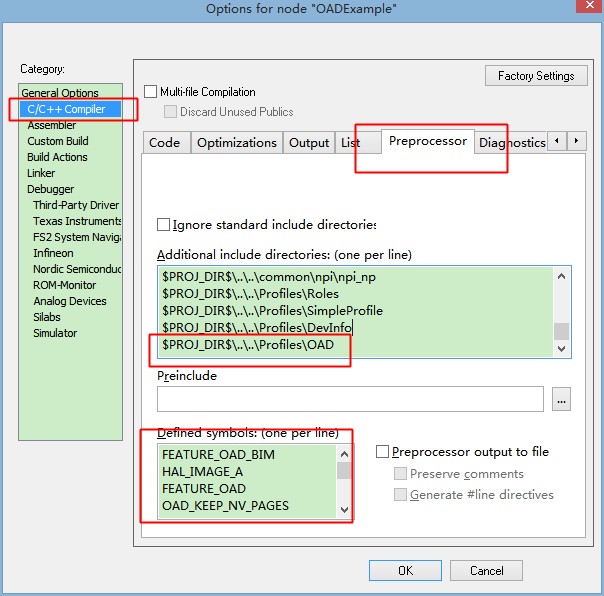
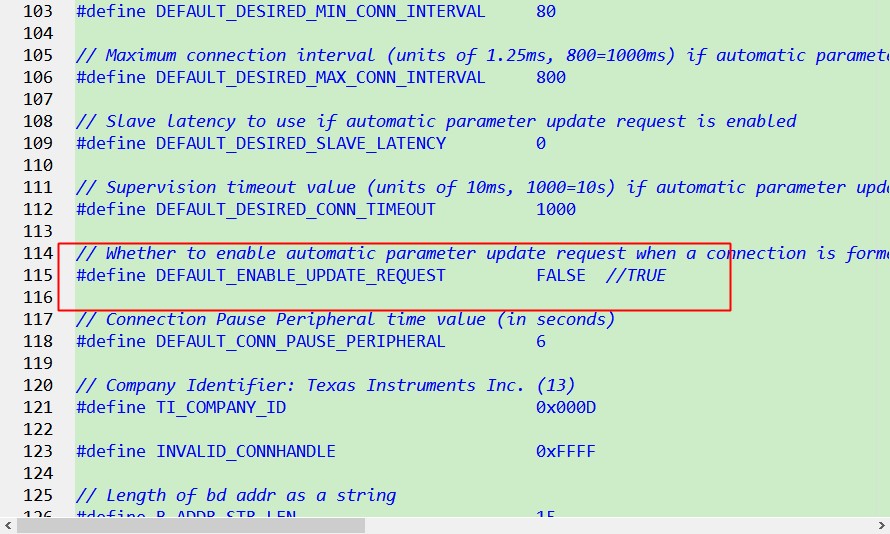
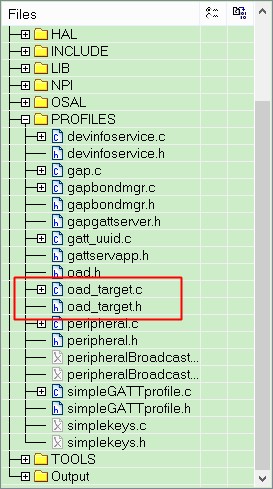
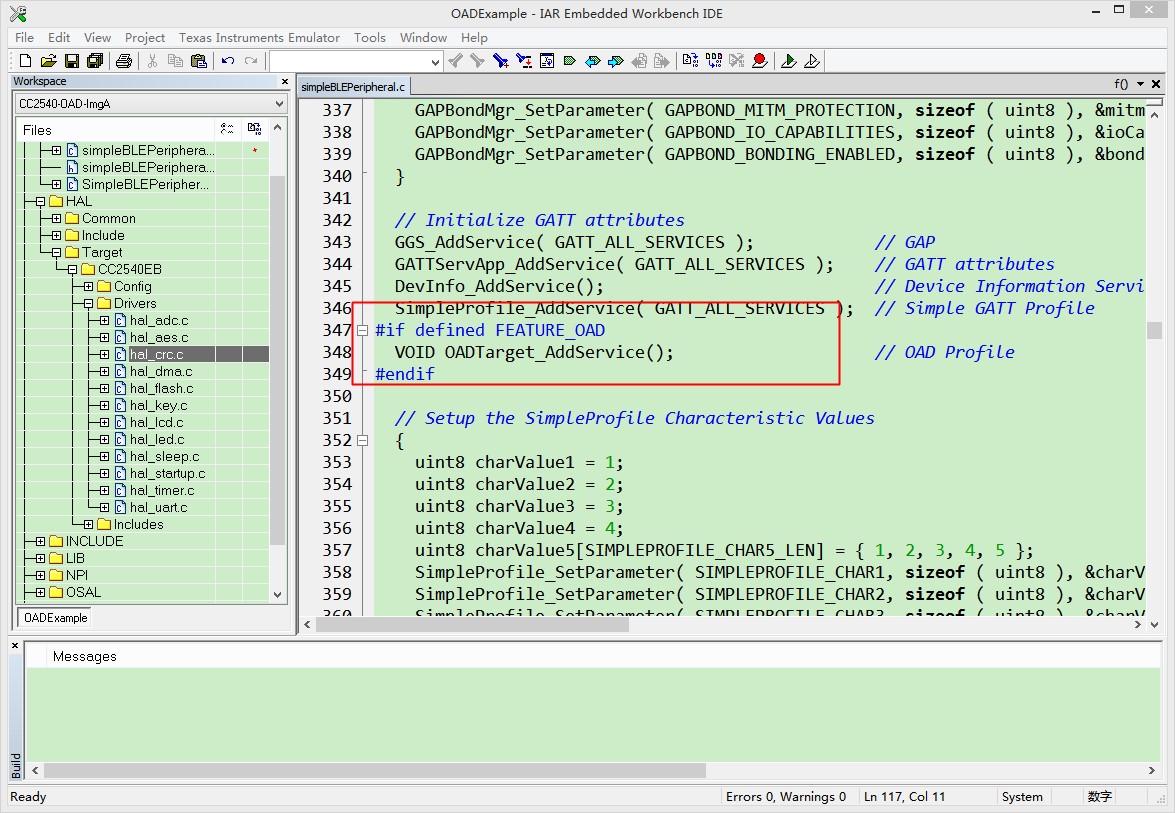
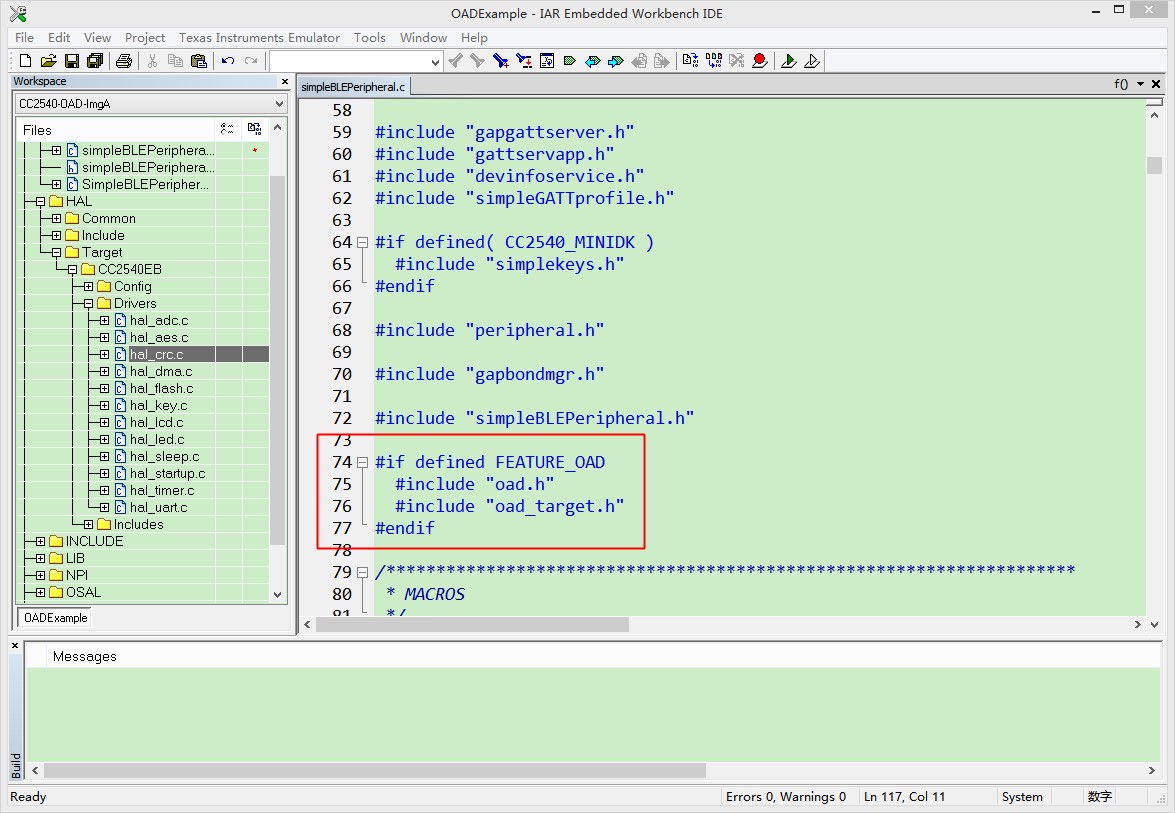
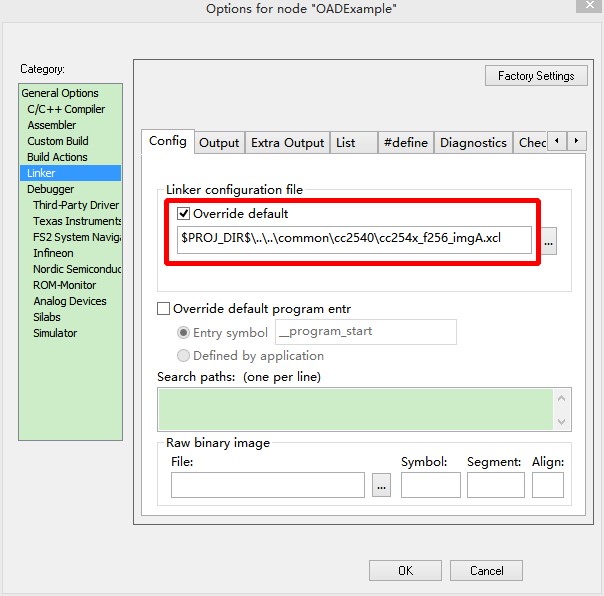
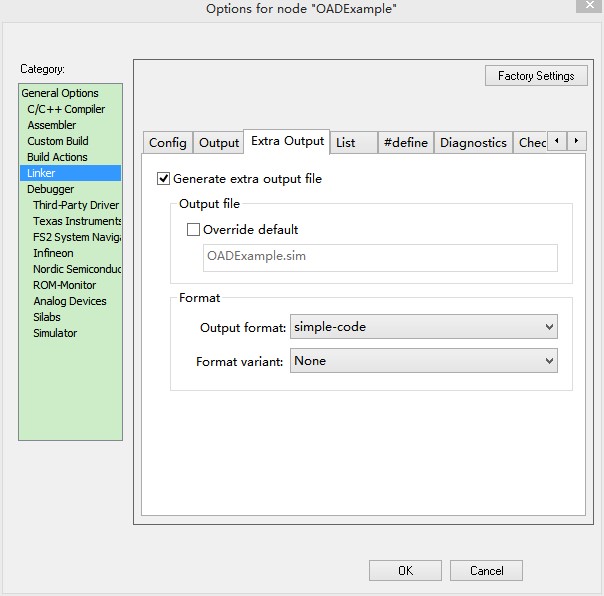
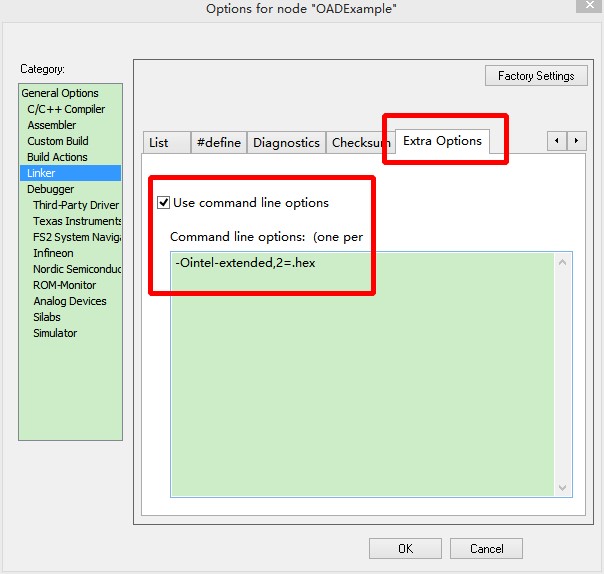
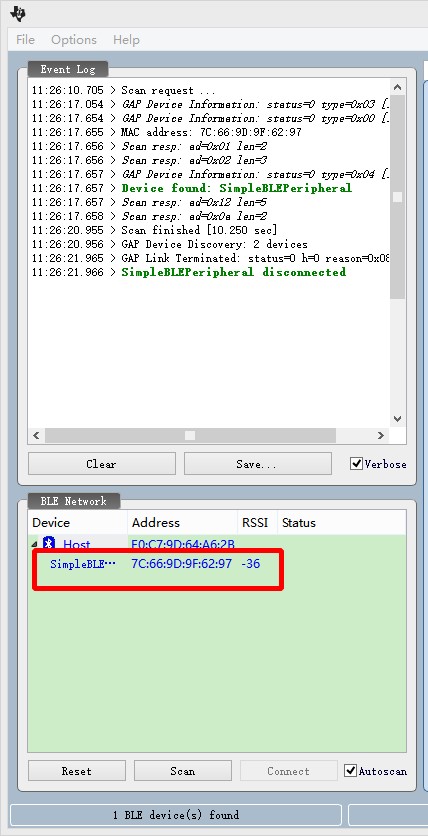
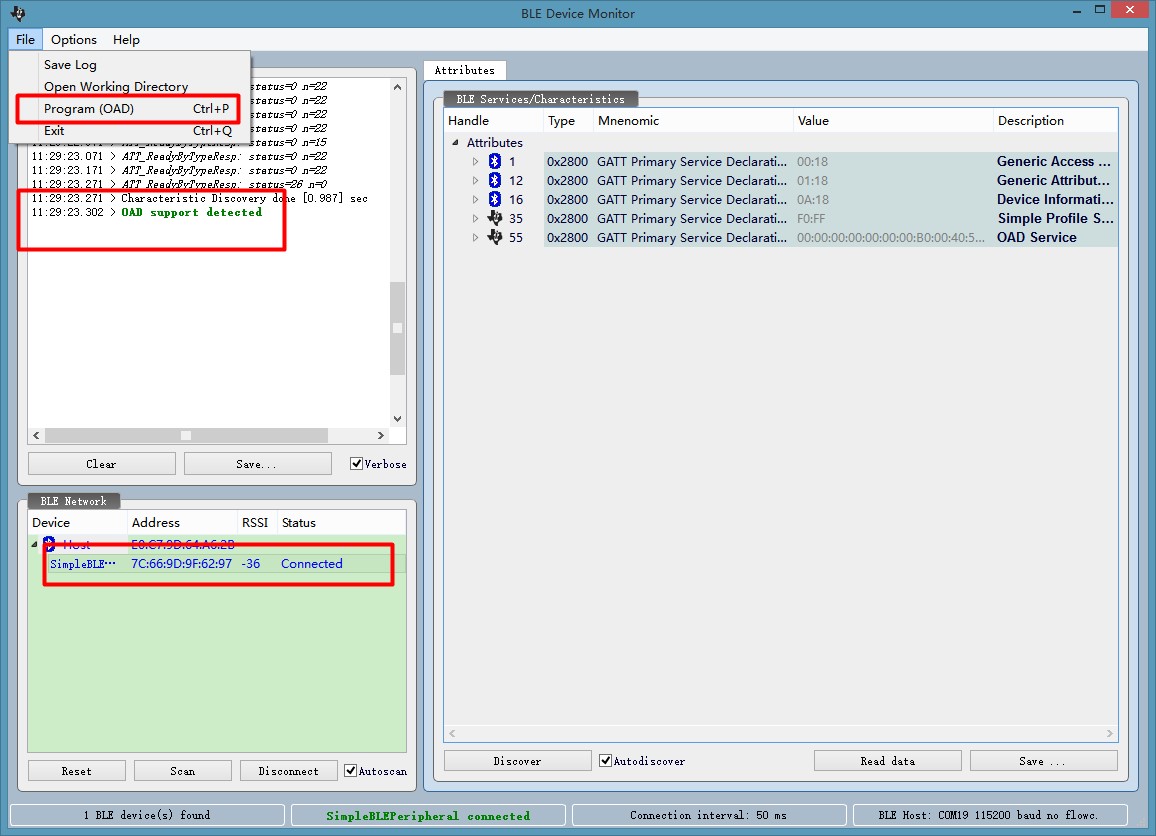
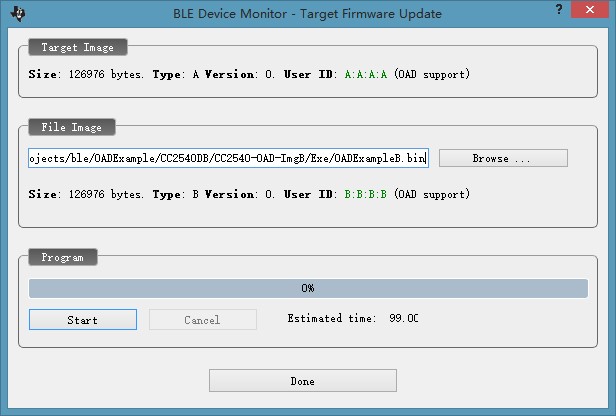
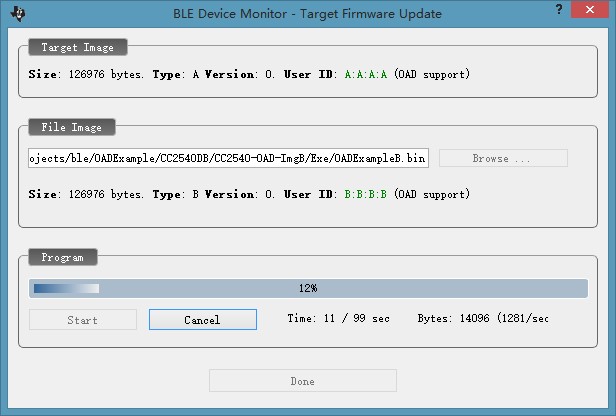
第二十三节 OAD空中升级
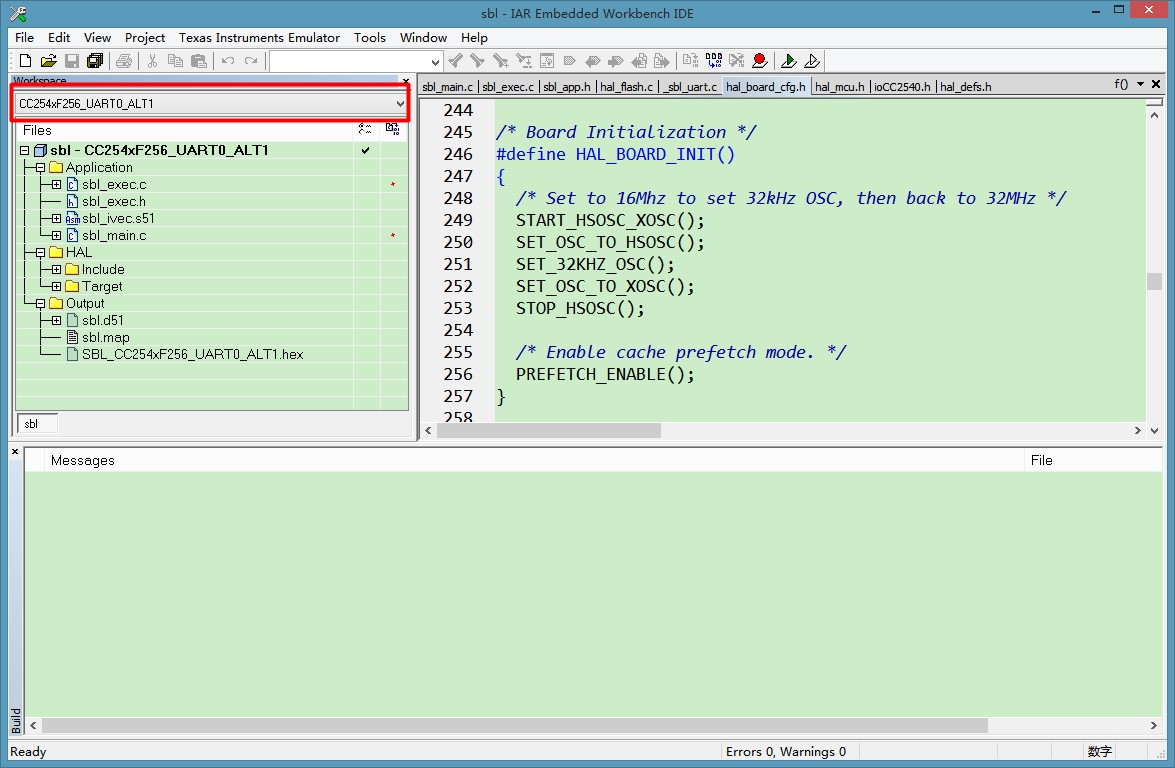
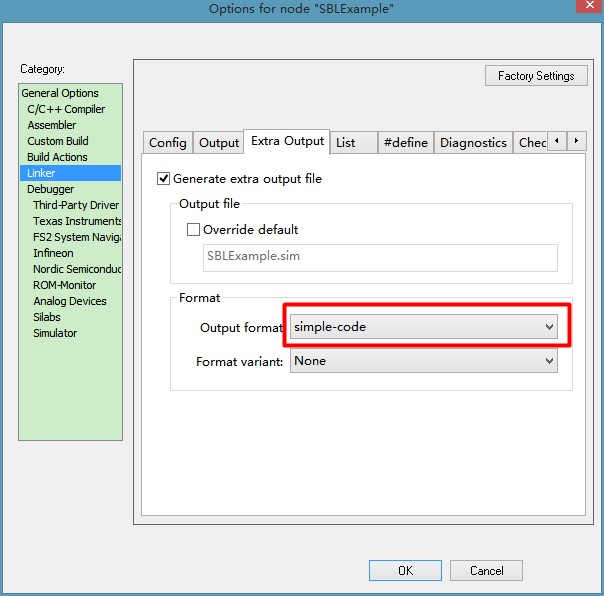
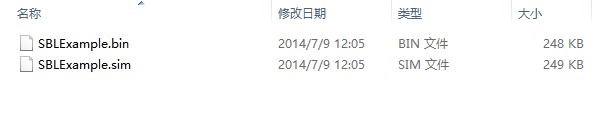
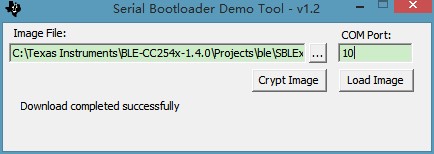
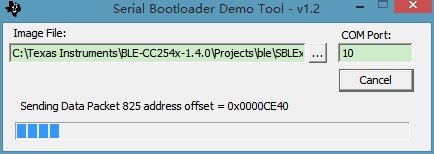
第二十四节 SBL串口升级
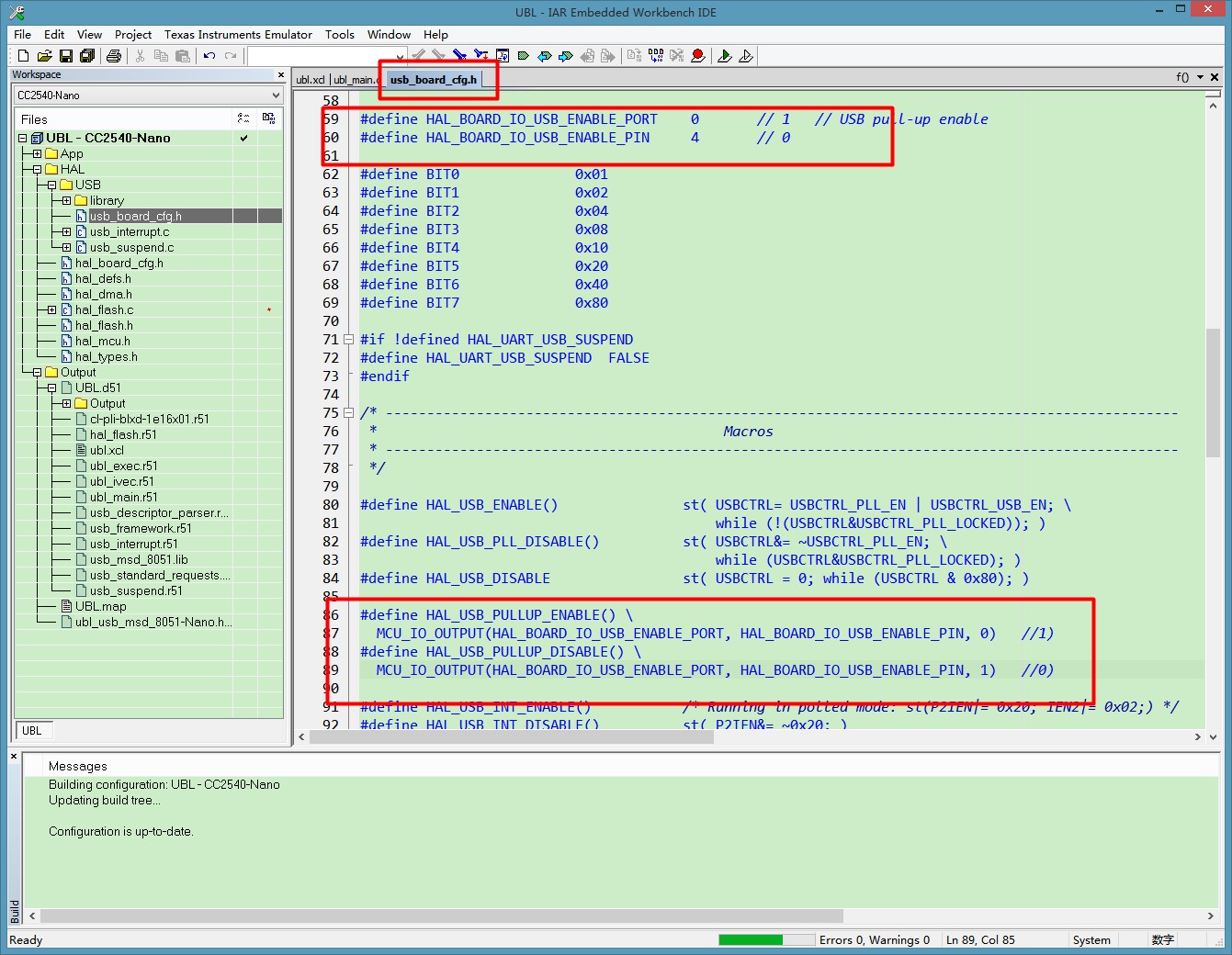
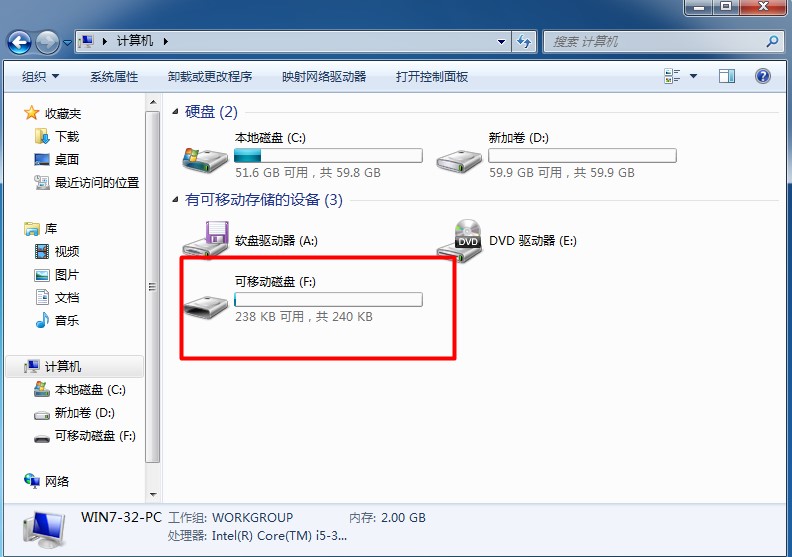
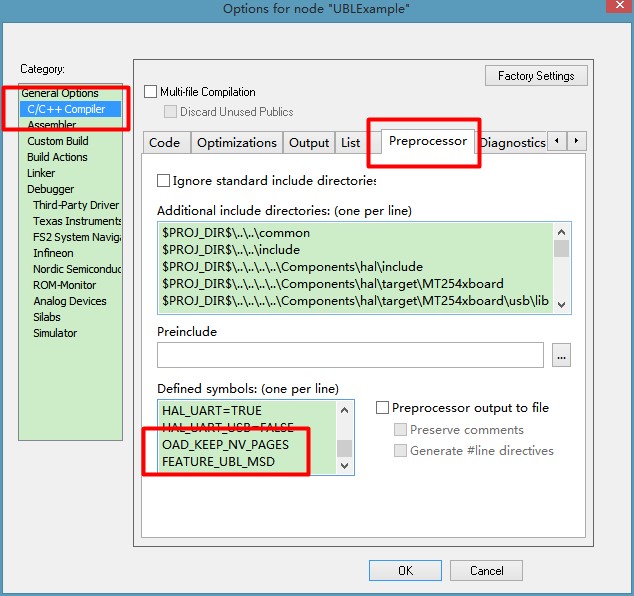
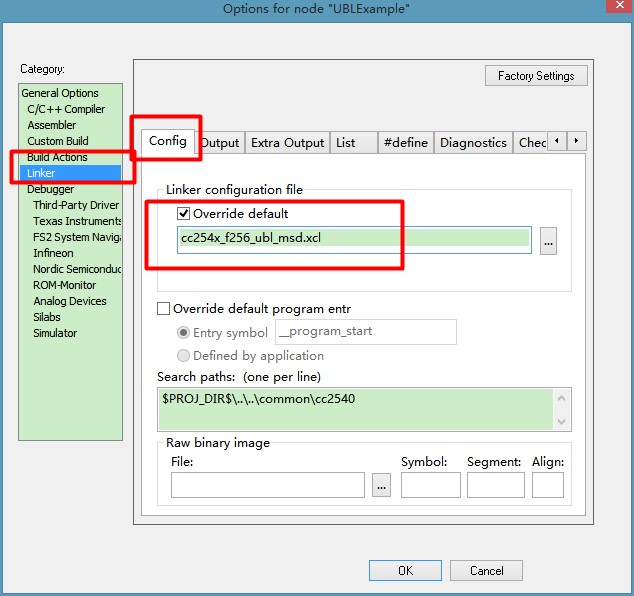
第二十五节 UBL-USB升级
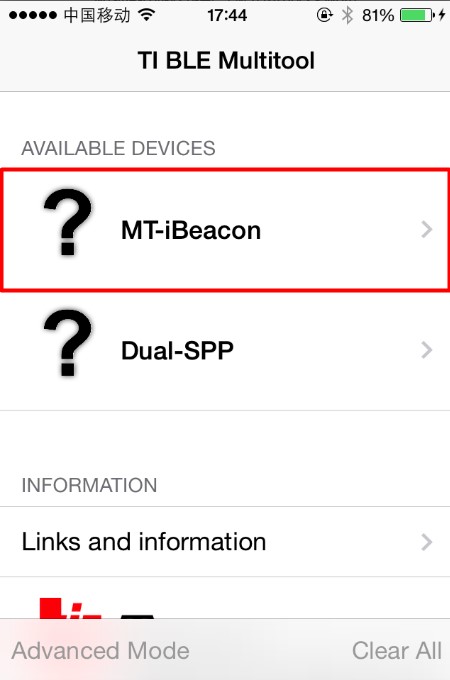
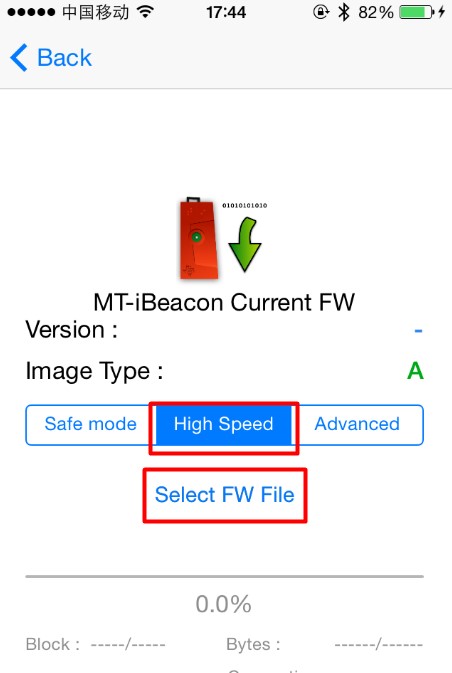
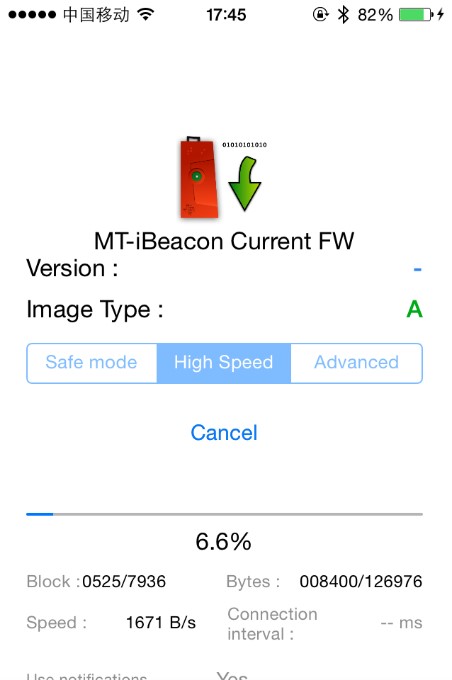
第二十六节 MT-iBeacon基站使用iPhone空中升级
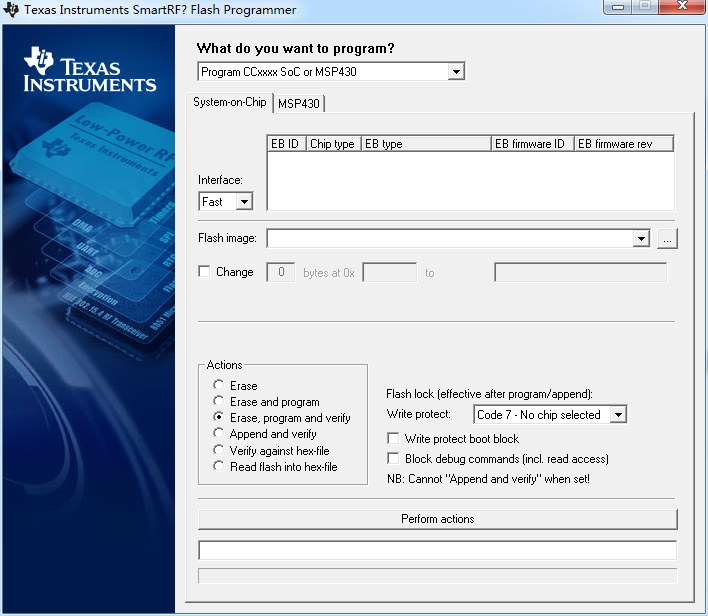
第二十七节 MT-iBeacon基站在PC端实现OAD空中升级
第二十八节 MT-iBeacon基站关于LightBlue软件的使用
第二十九节 如何使用MT-USBDongle的透传功能








































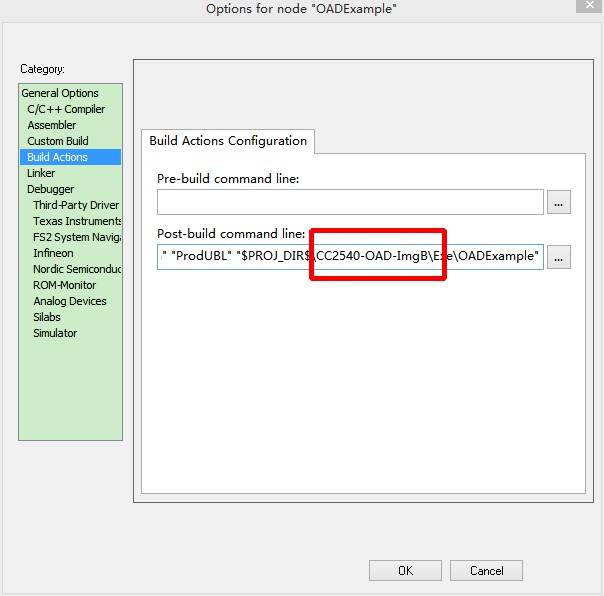
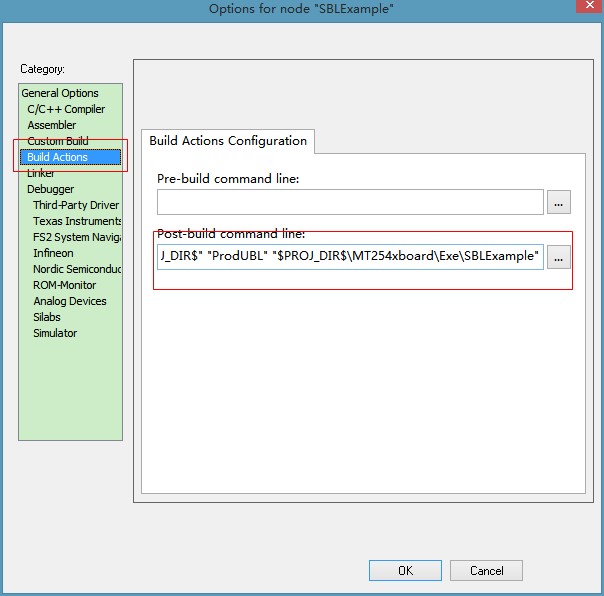
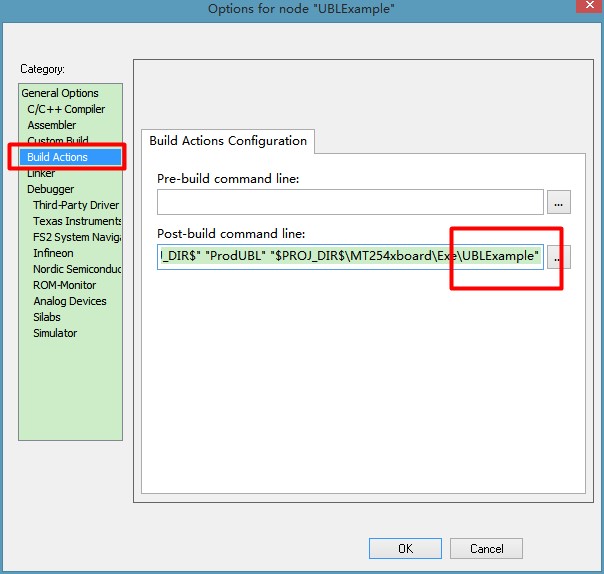
 rodUBL""$PROJ_DIR$\CC2540-OAD-ImgA\Exe\OADExample"
rodUBL""$PROJ_DIR$\CC2540-OAD-ImgA\Exe\OADExample"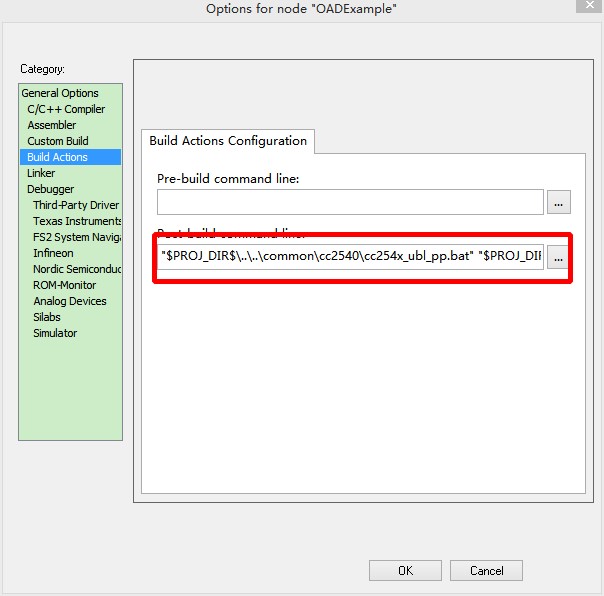











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}