请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:OPA564 主题中讨论的其他器件: TINA-TI、 THS4032
你(们)好。
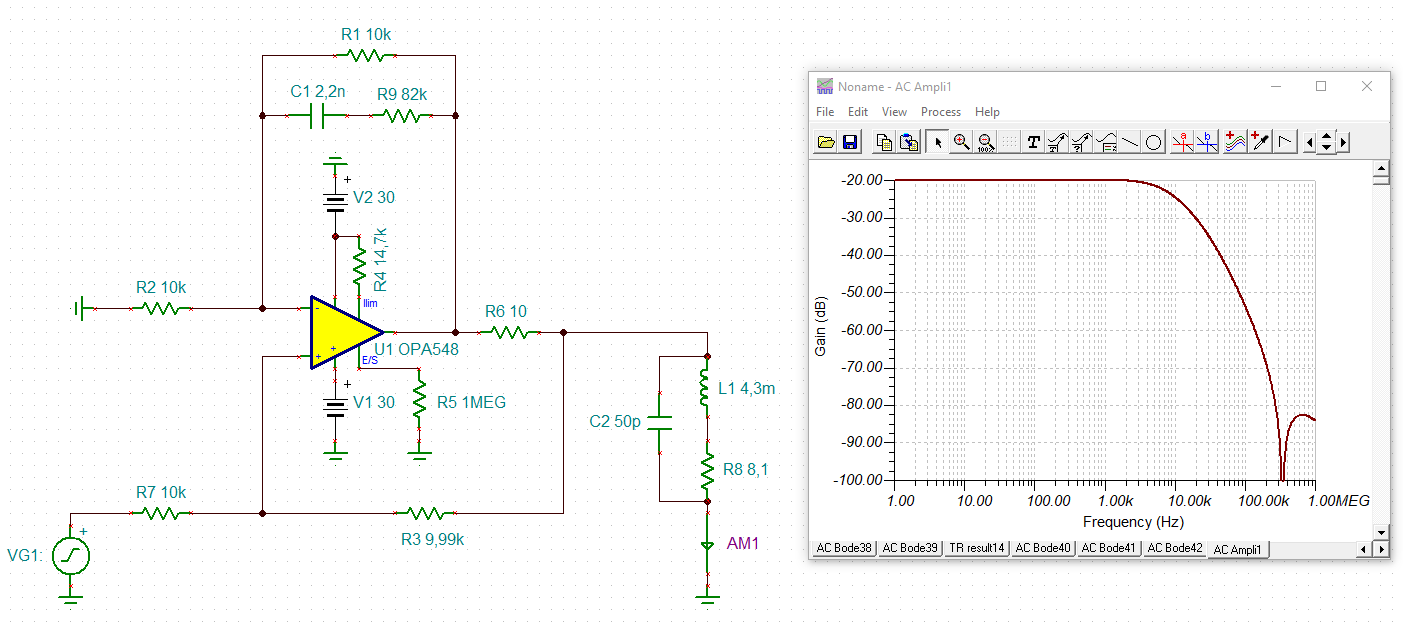
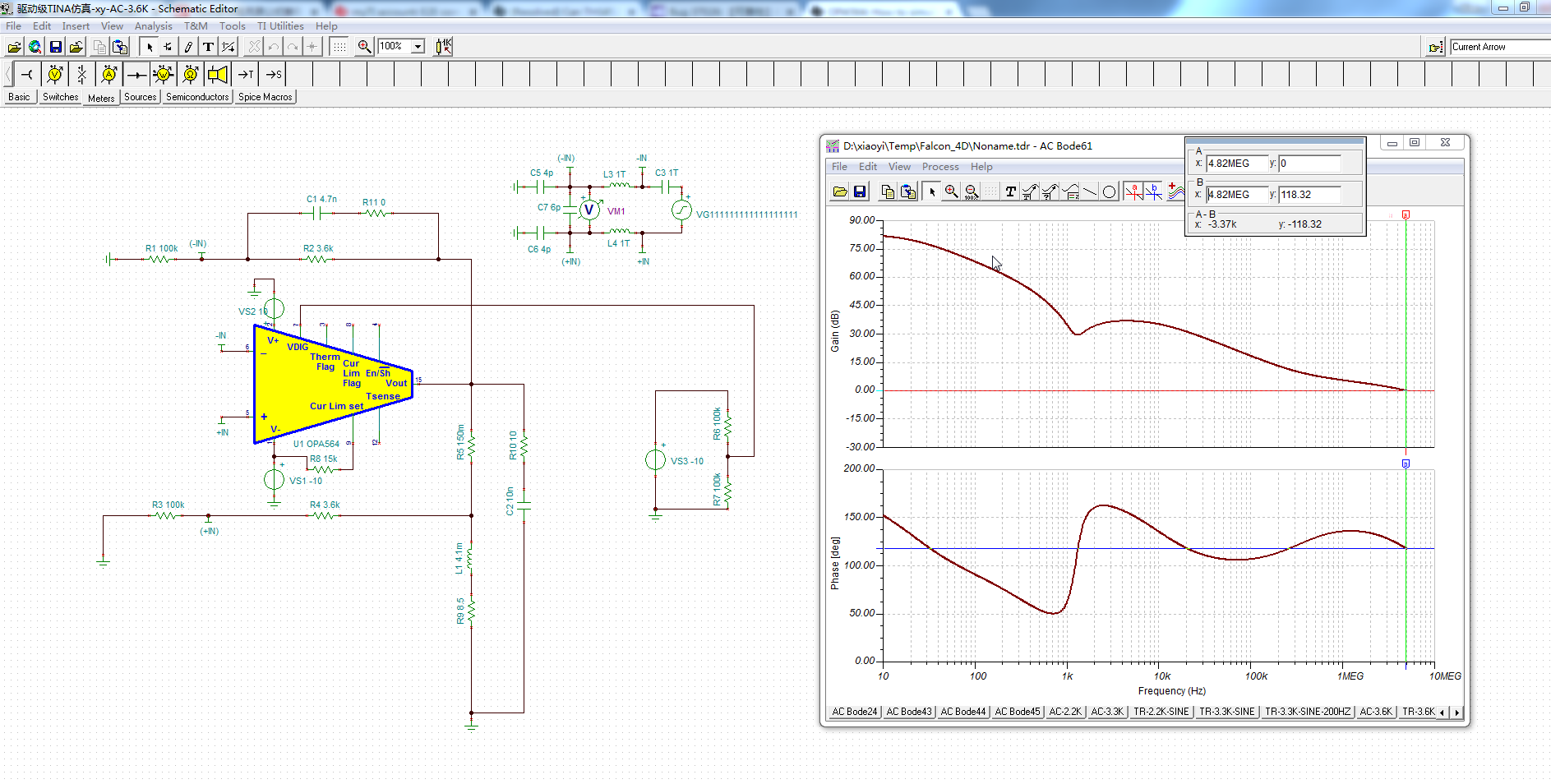
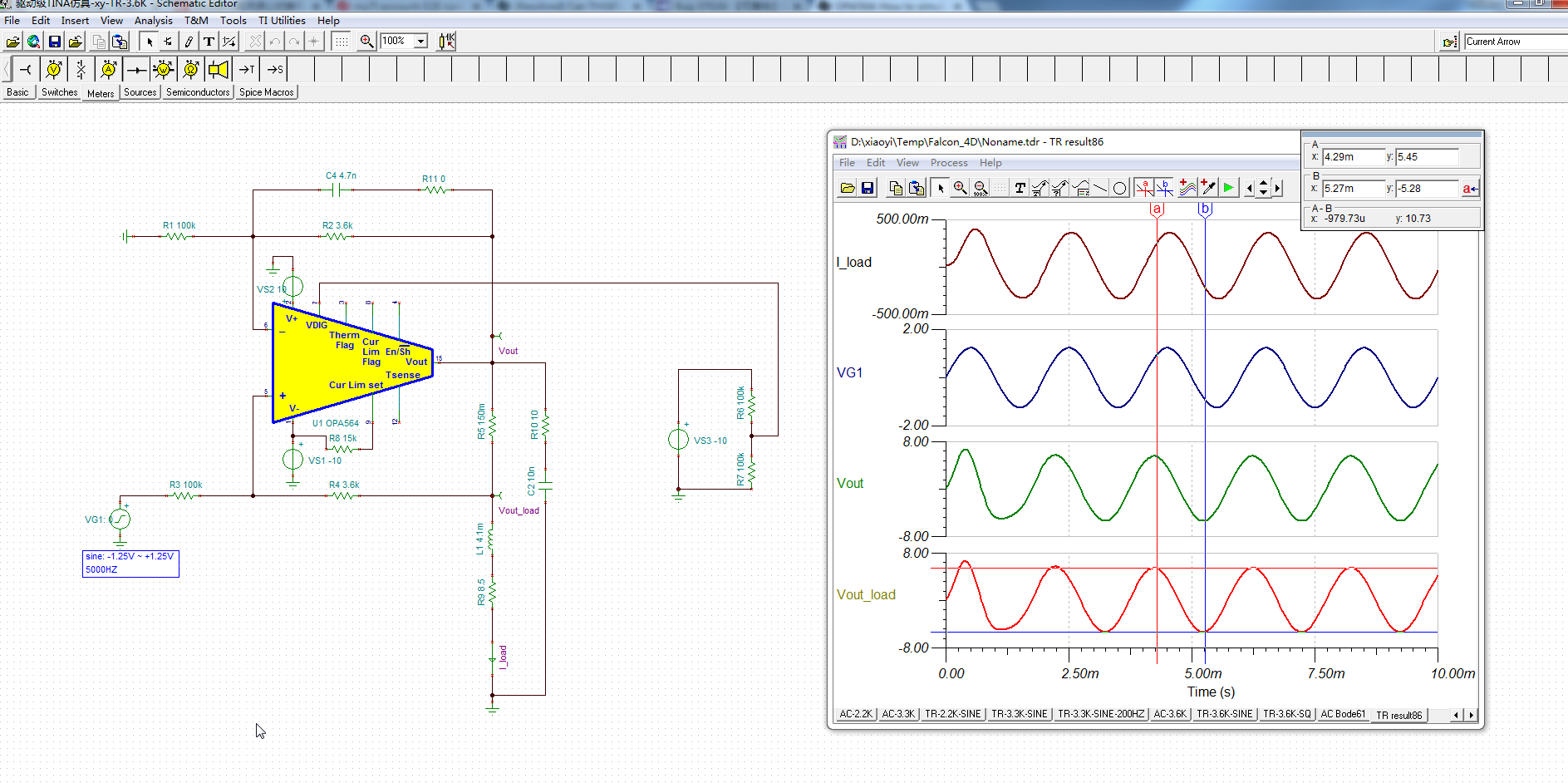
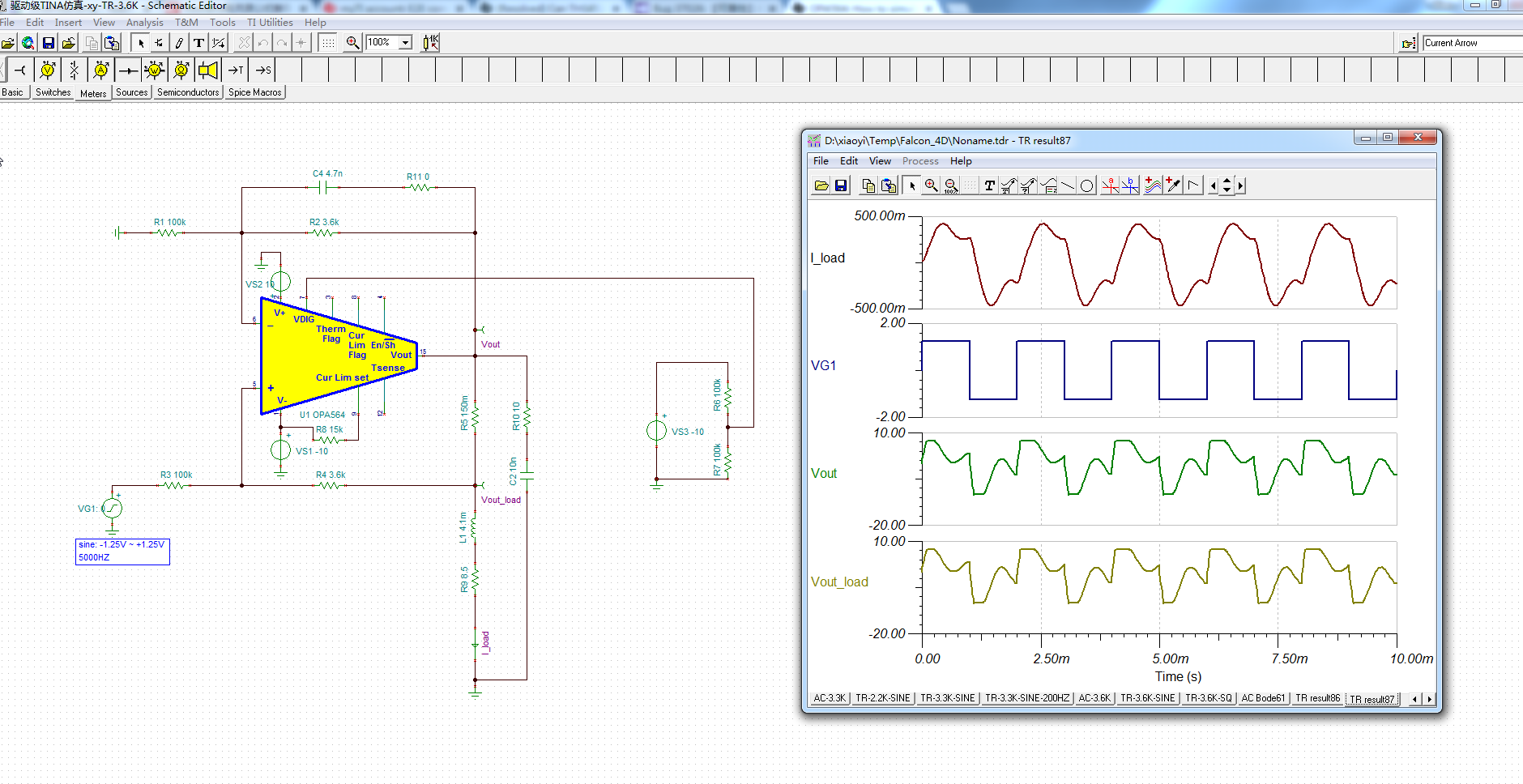
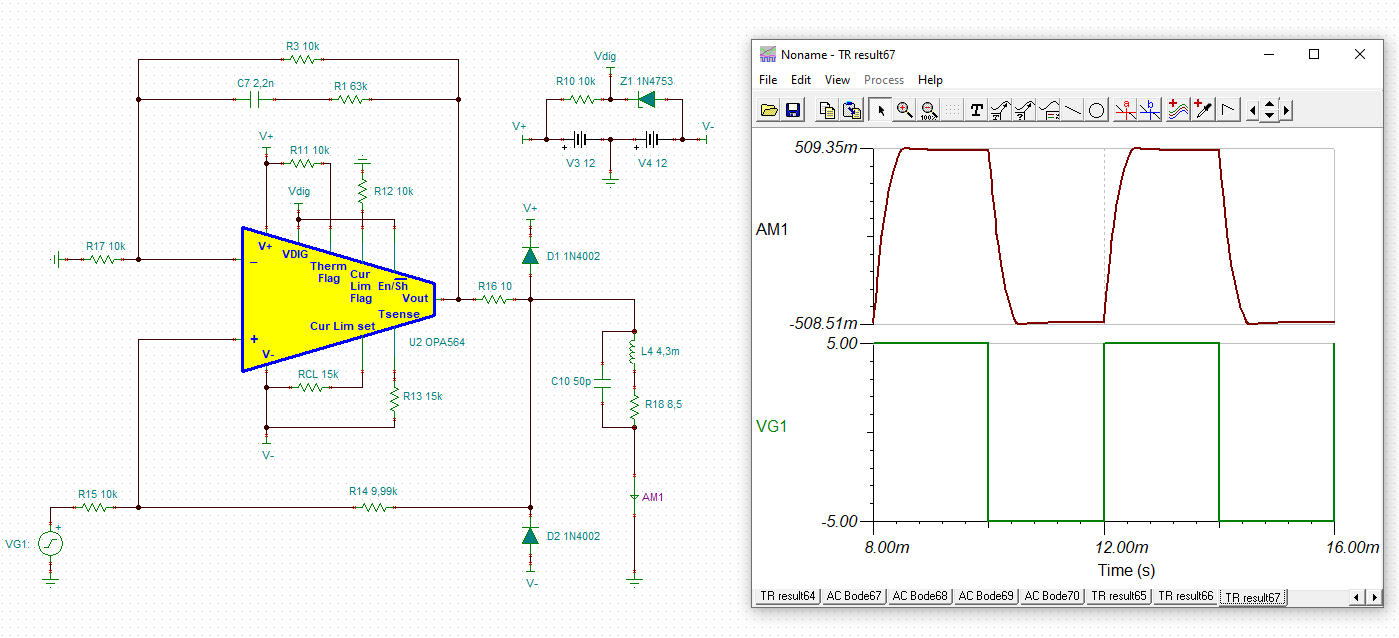
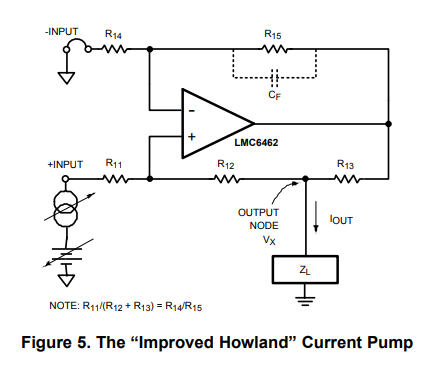
我们将使用两个配置为改进型 Howland 电流源的 OPA564 (SCH 参考 TI sna474a 图5)。 )、以驱动两个步进电机线圈(8.1欧姆+ 4.3mH)、我们需要对此电路的稳定性进行仿真。
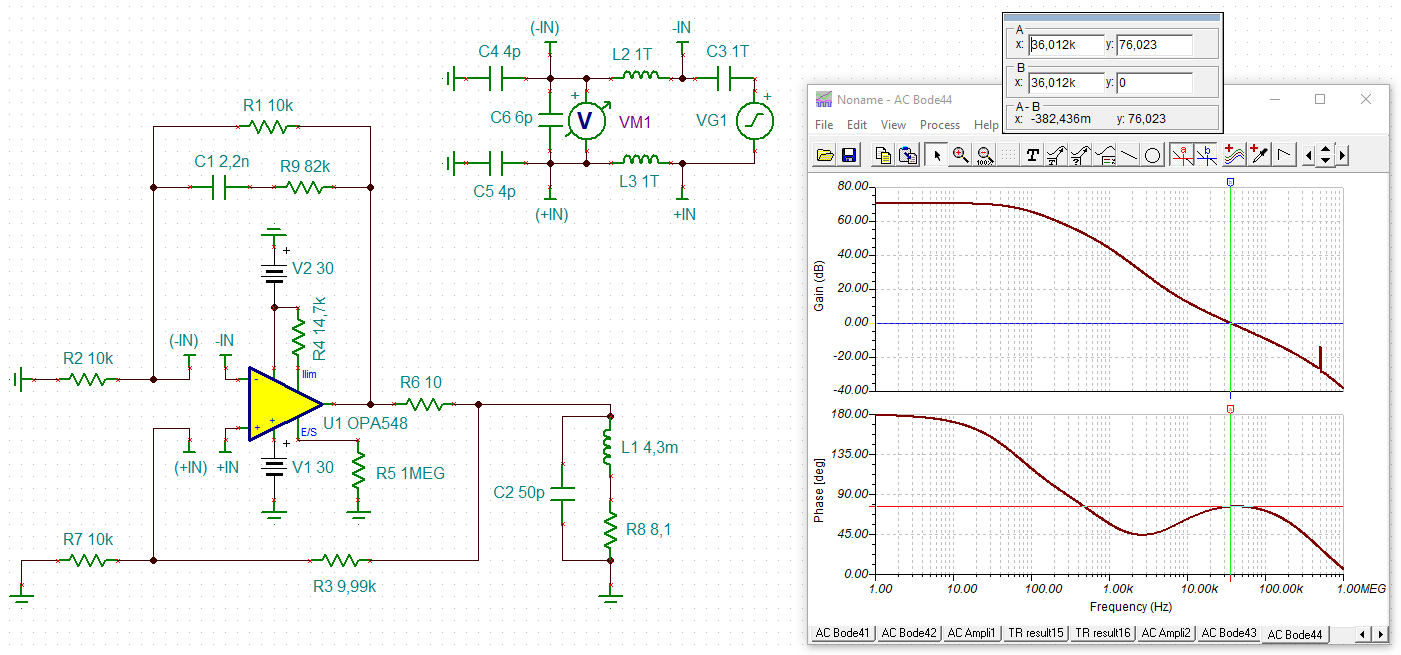
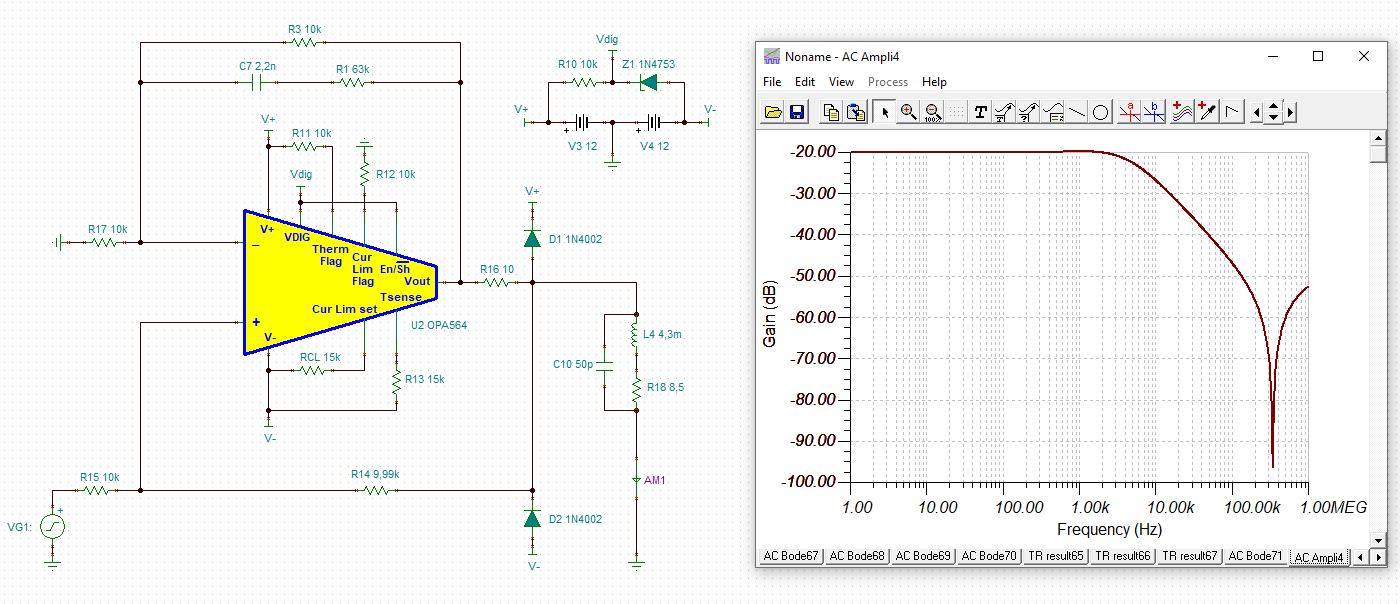
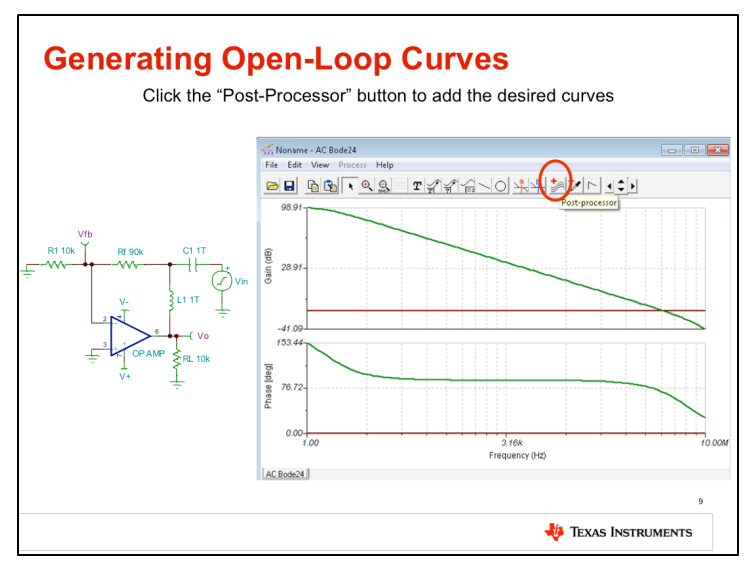
尽管我在 TI 高精度实验室视频 10.3部分中学习了相关知识、但在仿真中、我们应该使用巨型 L 和 C 来断开环路、以获得环路增益(如下所示)、 但 我在如何在 Howland 电路上执行此"中断"时遇到了问题、因为它包含负反馈路径和正反馈路径。
我在这个论坛上搜索并找到了这个重新布局的原始帖子(https://e2e.ti.com/support/amplifiers/f/14/t/678722)、其中 Tim Green1 附加了 一个与我的问题相关的 e2e.ti.com/.../5047.OPA549-Howland-Stability.pptxmay、但我不太了解仿真配置、希望一些专家能帮助解释。
欢迎任何建议,非常感谢!