“线程”中讨论的其它部件:EK-TM4C1294XL, 测试, DK-TM4C129X
我有一个带有 TM4C129ENCZADT3 MCU 的定制 PCB,我正在尝试获取 Enet_UIP 示例,以使 EK-TM4C12994XL 启动板与 TM4C129ENCZADT3 MCU 配合使用。
我首先测试 EK-TM4C1294XL 上的 Enet_UIP 示例项目,以检查它是否工作正常。 为了让这个项目在定制板上运行,我不得不取消评论,
#define use_static_IP
可在启动板和定制板上设置静态 IP 地址。
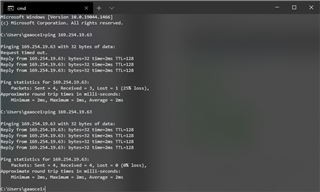
我的 PC 的静态 IP 为169.254.19.62,而 EK-TM4C1294XL 的静态 IP 为169.254.19.63。 对 EK-TM4C1294XL 进行编程后,我可以向启动板发送 ping 请求,并可以看到数据包被发回 PC。
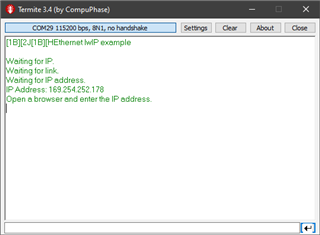
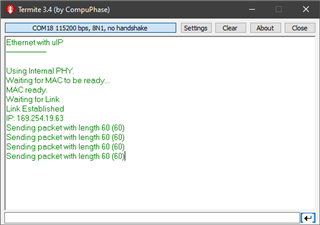
下面是启动板的调试输出。 正在发送数据包以响应 ping 请求。
下面是向启动板发送数据包的 PC,
我尝试更改示例 Enet_UIP 项目以与具有 TM4C129ENCZADT3 MCU 的自定义 PCB 配合使用。
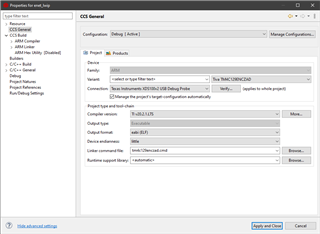
我首先转到项目属性并更改设备和连接:
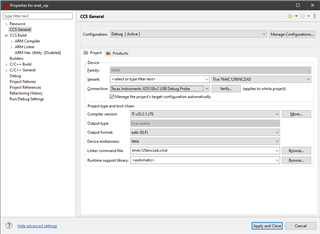
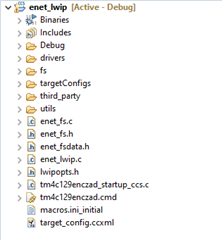
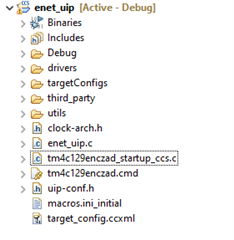
单击应用并关闭 CCS 后,似乎会添加新的链接器命令文件和启动源文件。
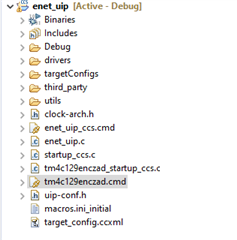
我修改了 tm4c129enczad_startup_cs.c,使其与 startup_cs.c 匹配,并修改了 tm4c129enczad.cmd,使其与 Enet_UIP_CCS.cmd 匹配。 更改这些文件后,将从示例项目中删除旧文件。
MAC 地址已成功编程到自定义 PCB 中。
CORTEX_M4_0: GEL Output: Memory Map Initialization Complete CORTEX_M4_0: User Register operation... CORTEX_M4_0: Writing the following value to Register0 (9a9413) and Register1 (2af7e2) translated from the given MAC address CORTEX_M4_0: Programmed value committing to User Register 0 CORTEX_M4_0: Programmed value was committed to User Register 0 CORTEX_M4_0: Programmed value committing to User Register 1 CORTEX_M4_0: Programmed value was committed to User Register 1 CORTEX_M4_0: Operation completed successfully. CORTEX_M4_0: User Register operation... CORTEX_M4_0: MAC address value: 13-94-9a-e2-f7-2a CORTEX_M4_0: Operation completed successfully.
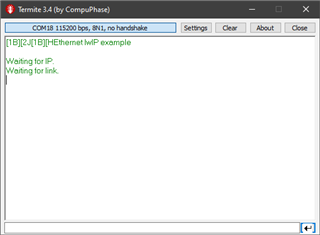
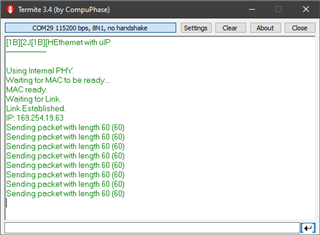
编程自定义 PCB 后,我无法建立链接。 该程序正在等待 Link。
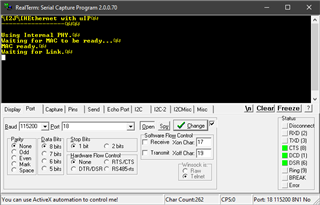
我不确定这是软件还是硬件问题。 我尝试过多台以太网交换机和 CAT5e 电缆,但没有成功。 随附了定制 PCB 的原理图和振光器文件。 有人有什么建议吗?
谢谢,
艾伦