请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS570LC4357 主题中讨论的其他部件:HALCOGEN
您好,TI团队:
我需要在UART引导加载程序中为可运行功能创建RTI。
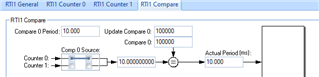
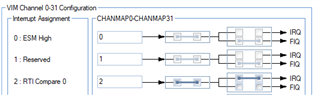
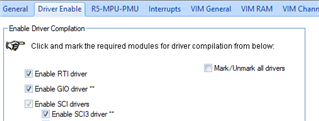
我已启用RTI驱动程序, VIM通道0-31已启用RTI比较1,RTI比较1期间已启用20.000 ms。
主文件中的初始化调用
rtiEnableNotification (rtiREG1,rtiNOTIFICION_COMPARE1);
_enable_IRQ_interrupit_();
rtiStartCounter(rtiREG1,rtiCOUNTER_Block1);
已创建RTI通知功能,但我在UART引导加载程序代码的rtiNotification中没有收到任何通知
void rtiNotification (rtibase_t *rtiREG,UINT32通知)
{
gioToggleBit(gioPORTB,2);
}
所以它在 _enable_irq_interrupti_()之后从_c_int00重置代码;否则它不调用 rtiNotification。
提前感谢
Santhosh