请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2732 Thread 中讨论的其他器件:SysConfig
您好!
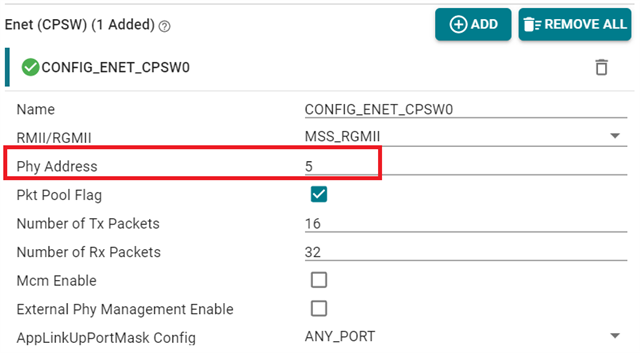
客户想要配置 phyaddr、如何在 SysConfig 中配置 phyaddr? 可以通过代码找到 CONFIG_ENET_CPSW0_PHY0_ADDR 在 TI_DRIVERS_CONFIG_h 中定义的内容、该文件由 SysConfig 生成、但在 SysConfig 中找不到相关配置。