请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432E411Y-BGAEVM Thread 中讨论的其他器件:SYSBIOS
我正在移植 Linux C++应用程序以在 TI RTOS 下运行。
为了将被覆盖的、派生的类方法用作任务函数、我实现了一个 extern "C"函数作为中间步骤-
extern "C" void * ThreadEntry(CBaseThreadClass * arg)
{
return arg->ThreadRuntime();
}
这只需将"thes"作为参数传递给 pthread_create。
bool CBaseThreadClass::StartThread()
{
...
int retc = pthread_create(&m_thread, &m_attributes, (THREADFUNCPTR)ThreadEntry, this);
...
似乎是在工作——到目前为止,太好了!
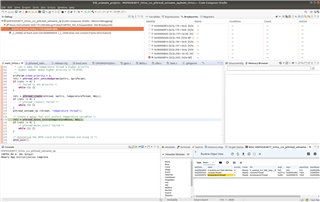
遗憾的是、在 ROV 中、所有任务在"fxn"列中都有"ThreadEntry"、因此很难区分它们。
我看到一个很有用的称为"label"的列。 对于"ti.sysbios.KNL.Task.IdleTask"以外的所有器件、此位为空。 我是否有办法为任务设置此项、以便我知道哪项是什么?
谢谢