

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LS3137 主题中讨论的其他器件:HALCOGEN
大家好、
虽然我已经从 halcogen 和 CCS 软件进行了必要的配置、但我无法获取稳定的数据。 当我生成 PWM 并以捕获模式读取它时、我获得的数据始终正确、但它不检测 GND 和空闲状态。
如果您能对此提供帮助、我将非常高兴。
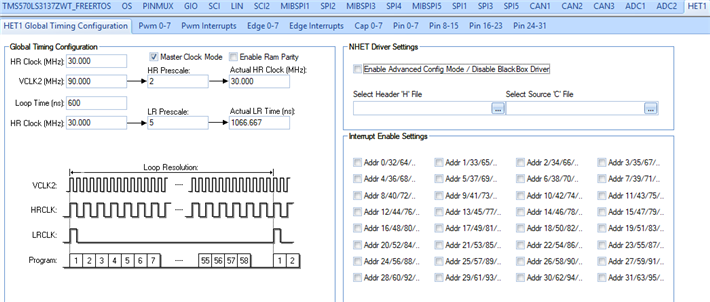
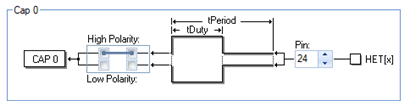
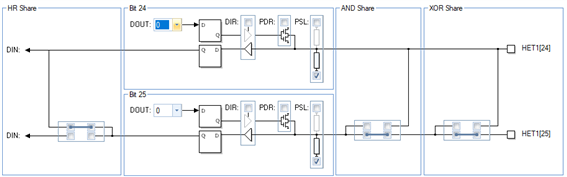
Halcogen 配置:
CCS 代码配置:
/** PWM 占空 比和 频率 设置 开始 代码 */
hetSIGNAL_t 信号;
信号占空 比= 50;
SIGNAL.PERIOD = 1000;
pwmSetSignal (hetRAM1、pwm0、Signal);
/** PWM 占空 比和 频率 设置 结束 代码 */
/** 捕获 模式 读取 开始 代码 */
while (1)
{
capGetSignal (hetRAM1、 cap0、 &DataCap0);
浮点 PeriodValueCap0 = ceil (DataCap0.Period);
float DutyValueCap0 = DataCap0.Duty;
}
/** 捕获 模式 读取 结束 代码 */
